| |
|
  |
 Датчик крена и дифферента Датчик крена и дифферента |
|
|
|
|
 Feb 23 2015, 19:19 Feb 23 2015, 19:19
|
Знающий

Группа: Свой
Сообщений: 608
Регистрация: 10-07-09
Из: Дубна, Московская область
Пользователь №: 51 111

|
В воздушной среде и в движении иногда применяют пирометрические "вертикали". Думаю вполне возможно использовании и на Вашей лодке.
|
|
|
|
|
|
|
|
Feb 23 2015, 19:42
|
Знающий
Группа: Участник
Сообщений: 998
Регистрация: 27-08-08
Пользователь №: 39 850
|
Цитата(SM @ Feb 23 2015, 18:06)  Статический угол по отношению к вертикали (вектору силы тяжести) измеряют акселерометры, собственно, измеряя величину и направление силы тяжести (точнее, ускорения g в векторном виде). При условии, что другие ускорения отсутствуют (или ликвидируются усреднением, если они знакопеременны), или известны. Я так понимаю, что гироскоп типа. L3G4200D не подойдет. В движении будет не то. Если так то может-ли акселерометр обеспечит точность измерения угла отклонения от вертикали 0.5 град. с темпом 200 мс? Вот один из методов http://www.findpatent.ru/patent/248/2486098.html Толком не понял...
|
|
|
|
|
|
|
|
Feb 24 2015, 08:20
|
Гуру
Группа: Свой
Сообщений: 7 946
Регистрация: 25-02-05
Из: Moscow, Russia
Пользователь №: 2 881
|
Цитата(Acvarif @ Feb 23 2015, 22:42) Если так то может-ли акселерометр обеспечит точность измерения угла отклонения от вертикали 0.5 град. с темпом 200 мс? Тут такое дело... Да, сможет (даже копеечный LIS3DH имеет чувствительность 1mg/мл.разряд, что в пересчете на угол при малых отклонениях будет около 0.09 градуса (1/999 * 90) ), но, только в том случае, если нет посторонних ускорений. А если капитан даст "полный вперед", то из-за ускорения самого судна, пока оно разгоняется, данные о дифференте будут искажены.
|
|
|
|
|
|
|
|
Feb 24 2015, 09:17
|
Знающий
Группа: Свой
Сообщений: 721
Регистрация: 23-10-08
Из: next to Odessa
Пользователь №: 41 112
|
Цитата(Acvarif @ Feb 23 2015, 14:23) Просьба посоветовать датчик который можно применить в качестве датчика крена и дифферента А если поставить в крайних точках судна ультразвуковые датчики измерения расстояния, направленные с борта вниз к воде. Датчики типа HC-SR04, по паспорту измеряет расстояние с разрешением ~3 мм в диапазоне от 3 до 400 см. Есть еще инфракрасные датчики измерения расстояния SHARP-GP2Y0A710K0F.. А дальше математика с усреднениями...
|
|
|
|
|
|
|
|
Feb 24 2015, 09:40
|
Знающий
Группа: Участник
Сообщений: 998
Регистрация: 27-08-08
Пользователь №: 39 850
|
Цитата(Serhiy_UA @ Feb 24 2015, 13:17) А если поставить в крайних точках судна ультразвуковые датчики измерения расстояния, направленные с борта вниз к воде. Датчики типа HC-SR04, по паспорту измеряет расстояние с разрешением ~3 мм в диапазоне от 3 до 400 см.
Есть еще инфракрасные датчики измерения расстояния SHARP-GP2Y0A710K0F..
А дальше математика с усреднениями... Для идеальных условий тоже вариант. Но все же наиболее подходящий вариант это акселерометр + гироскоп http://www.findpatent.ru/patent/248/2486098.html Только не врублюсь в эту математику... Какие операции нужно совершить с данными (по одной оси) гироскопа и акселерометра чтобы получить статический угол по этой оси на который произошло перемещение?
Сообщение отредактировал Acvarif - Feb 24 2015, 09:40
|
|
|
|
|
|
|
|
Feb 24 2015, 18:50
|
Знающий
Группа: Участник
Сообщений: 998
Регистрация: 27-08-08
Пользователь №: 39 850
|
Цитата(Alex11 @ Feb 24 2015, 19:24) Правильное слово называется инклинометр. В нем уже скомпенсировано все. И ускорения, и температурные зависимости в пределах разумного. Только стоят они не по-божески. Смотрите, например, SCA103T. Спасибо. Полезная информация. Стоит эта радость ~ 100 баксов. Только не понял будет-ли нормально работать инклинометр по одной оси если он установлен на движущемся объекте типа речное судно, где качает по всем осям? И тем не менее, слыша звон да не знаю где он, каким образом для получения стабильных углов используют совместно акселерометр и гироскоп? В смысле как примерно должна выглядеть в этом случае математика? Если это возможно, то инклинометр можно выполнить гораздо дешевле чем 100 баксов. Цитата(SM @ Feb 24 2015, 19:59) А вот интересно, как физически можно скомпенсировать ускорение, если для MEMS-датчика важна общая, суммарная сила, действующая на него, и он не может отличить силу тяжести от силы, вызванной другими ускорениями? А это не оно? http://www.poprobot.ru/theory/complementary_filter В смысле комплементарный фильтр, объединяющий акселерометр и гироскоп.
|
|
|
|
|
|
|
|
Feb 24 2015, 23:06
|

Местный
Группа: Участник
Сообщений: 253
Регистрация: 4-03-09
Из: Богота, Колумбия
Пользователь №: 45 676
|
Для судов применяются акселерометры, гироскопы и ДУСы там не нужны совершенно. Формулы дать? Цитата(Александр77 @ Feb 23 2015, 23:19) В воздушной среде и в движении иногда применяют пирометрические "вертикали". Думаю вполне возможно использовании и на Вашей лодке. Нет, не пойдёт. Точнее, сделать можно, но работать будет плохо и только вне видимости берега. Плюс, пары воды хорошо излучают в 14 мкм и будут давить тепловую картину. Цитата(SM @ Feb 24 2015, 20:59) А вот интересно, как физически можно скомпенсировать ускорение, если для MEMS-датчика важна общая, суммарная сила, действующая на него, и он не может отличить силу тяжести от силы, вызванной другими ускорениями? Гироскопом... Зная угловую скорость (а все мемс гироскопы, это именно ДУС) можно вычислить угловое ускорение и вычесть. Это и называется комплексирование и используется для построения БИНС. Минимальный набор БИНС - гироскоп и акселерометр. Ещё часто добавляют магнитометр, но я против такого решения, особенно в городах. Имею ввиду, вводить джанные магнитометра в код фильтра, а не просто самого магнитометра. Бывает и с GPS комплексируют. Для курсового угла. Цитата(SM @ Feb 24 2015, 12:20) но, только в том случае, если нет посторонних ускорений. А если капитан даст "полный вперед", то из-за ускорения самого судна, пока оно разгоняется, данные о дифференте будут искажены. Два датчика поставить встречно по осям, дальше задача сводится к вычислению постоянной (средней) составляющей.
|
|
|
|
|
|
|
|
Feb 25 2015, 07:27
|
Знающий
Группа: Участник
Сообщений: 998
Регистрация: 27-08-08
Пользователь №: 39 850
|
Цитата(Dikoy @ Feb 25 2015, 03:06) Для судов применяются акселерометры, гироскопы и ДУСы там не нужны совершенно. Формулы дать?
Гироскопом... Зная угловую скорость (а все мемс гироскопы, это именно ДУС) можно вычислить угловое ускорение и вычесть.
Это и называется комплексирование и используется для построения БИНС. Минимальный набор БИНС - гироскоп и акселерометр. Ещё часто добавляют магнитометр, но я против такого решения, особенно в городах. Имею ввиду, вводить джанные магнитометра в код фильтра, а не просто самого магнитометра.
Бывает и с GPS комплексируют. Для курсового угла.
Два датчика поставить встречно по осям, дальше задача сводится к вычислению постоянной (средней) составляющей. Спасибо. Формулы дать. Все же читая эти материалы 1. http://www.geekmomprojects.com/gyroscopes-...ters-on-a-chip/ 2. http://www.poprobot.ru/theory/complementary_filter получается что гироскоп в моем случае не помешает. По поводу ускорений и замедлений судна: разве расчет представленный в http://www.geekmomprojects.com/gyroscopes-...ters-on-a-chip/ не учитывает эти факторы?
|
|
|
|
|
|
|
|
Feb 25 2015, 17:23
|
Местный
Группа: Участник
Сообщений: 253
Регистрация: 4-03-09
Из: Богота, Колумбия
Пользователь №: 45 676
|
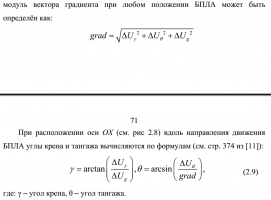
Комплиментарный фильтр, это самая примитивная реализация комплексирования датчиков. Для правильной оценки, такому фильтру нужны периоды покоя системы, когда он может выделить вектор ЖО и скомпенсировать гироскоп. Взрослые дяди комплексируют через фильтр Калмана, но это не конкретная реализация, а целый раздел математики, и фильтр выводится из вектора состояния, который задаётся исходя из конкретной задачи. Вы можете поискать патенты на данный счёт. Но, на судах нет такой динамики, для которой нужно было бы компенсировать акселерометр по ДУСу. Разумеется, если у вас не океанская яхта, что по волнам фигачит на 70 узлах. Для акселерометров достаточно два датчика, поставленных встречно. То есть с двух сторон платы. Каждое показание состоит из проекции ЖО + некое паразитное а, сдвигающее результирующий вектор в пределах конуса состояний. Причём значение ЖО вы знаете (достаточно один раз откалибровать датчики на земле). Формулы вытащить не получилось, прилагаю картинкой. Это стандартные формулы из учебника Пельпора. Подразумевается синусоидальная зависимость показаний от угла. Пельпор Д.С. Гироскопические приборы и системы: Учеб. для вузов по спец. «Гироскоп, приборы и устройства» / Д.С. Пельпор, И.А. Михалев, В.А. Бауман и др.; Под. ред. Д.С. Пельпора. – 2-е изд., перераб. и доп. – М.: Высшая школа, 1988 г. – 424 с.; ил. Хорошая книжка, базовую теориюраскрывает достаточно ясно, при наличии вузовской базы по математике. Купите пару модулей MPU-6050 на али, их там как грязи. Да поиграйтесь. Но гироскоп вам не нужен. Или можете купить готовую гироголову FY-AHRS -2000B к примеру. Там на выходе UART, протокол обмена открыт на сайте. Хотя работает она не сказать, что хорошо, но для вашей задачи может и хватить.
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|