Заканчиваю текущий проект, поэтому поднимаю тему.
Ниже примеры последних работ.
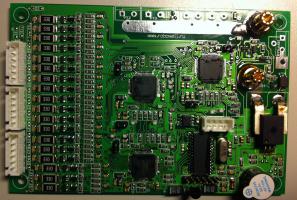
Модуль управления 4-мя шаговыми двигателями. Кроме двигателей, на плате стоит большое число ключей для разных задач. Общается с внешним миром одновременно по USB и UART. Предназначен для пром. применения:
 Балансирующий робот.
Балансирующий робот.Управляется через WiFi, к сети подключается через точку доступа. Используется TCP/IP стек от microchip.
Конфигурация сети робота (задание SSID, шифрования и т.д.) выполняется по UART. Возможно синхронное управление большим числом роботов. При соответствующем дизайне и синхронном движении эти роботы должны выглядеть красиво.
Видео прототипа:
http://www.youtube.com/watch?v=cAc8ALvhdXYБолее серьезный балансирующий аппарат -
сигвей на 1кВт мотор-колесах. Электроника полностью моя.
Видео (я там с 10 по 40 сек.):
http://www.youtube.com/watch?v=xk-ZPRDv9aEИ тоже самое, только с одним колесом.
Моноцикл:
http://www.youtube.com/watch?v=q3S1YWMmXbQ
Сообщение отредактировал vk123 - Oct 8 2015, 11:20



















 Sep 7 2014, 08:05
Sep 7 2014, 08:05