| |
|
  |
 Контур тока (момента) при управление двигателем Контур тока (момента) при управление двигателем, Какое назначение ? |
|
|
|
|
 Jul 3 2016, 15:38 Jul 3 2016, 15:38
|
Гуру

Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741

|
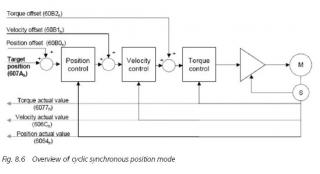
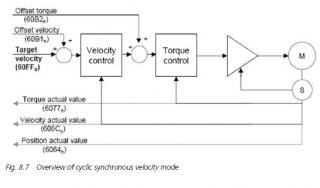
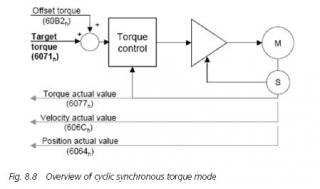
Коллеги, кто может лопатологически обьяснить методы реализации управления сервоприводами Код Cyclic Synchronous Position
Cyclic Synchronous Velocity
Cyclic Synchronous Torque Все это реализуется в одном и том же приводе, при этом видны стандартные индексы словарей CiA402 Cyclic Synchronous Torque обычно возможен только при управлении через эзернет (EtherCAT), т.к у CANOpen не хватает быстродействия. Cyclic Synchronous Velocity находится на границе между EtherCAT и CANOpen, т.е у некоторых сервоконтроллеров может быть реализован и по CAN. Кто-нибудь использовал в своих контроллерах полный CiA402 или его подмножество?
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
Guest_TSerg_*
|
Jul 3 2016, 18:15
|
Guests
|
|
|
|
|
|
|
|
|
Jul 8 2016, 11:51
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(khach @ Jul 3 2016, 22:22)  oleg_d
Возник интересный вопрос- ваш контроллер позволяет работать паре контроллеров в режиме электронного дифференциала? Т.е на каждую полуось- отдельный контроллер и отдельный мотор? Можно ли реализовать выравнивание моментов (вернее тяговых усилий) при прохождении виража в соответствии с датчиком центробежных ускорений или датчиков деформации подвески? Если Вы говорите о векторном управлении тягой, да это возможно, правда волчья яма поджидает на каждом шагу. Что касается имитации дифференциалов (в том числе полного привода) то тут все просто.
|
|
|
|
|
|
|
|
Jul 8 2016, 13:00
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(oleg_d @ Jul 8 2016, 13:51) Что касается имитации дифференциалов (в том числе полного привода) то тут все просто. А можно по подробнее? Потому что из статей типа https://hal.archives-ouvertes.fr/hal-00578429/document http://journals.tubitak.gov.tr/elektrik/is...-1-2-0801-1.pdfпростота совсем не очевидна. А стабильность транспортного средства при подпрыгивании подвески на неровностях дороги- вообще темный вопрос. Я в этой теме вообще не разбираюсь, просто знакомые начали выбирать электропривод для нового проекта и спрашивают возможно ли это вообще и как реализовать контур управления электронного дифференциала. Т.е требуется ли внешний контроллер, или контроллеры привода умеют сами взаимодействовать в режиме ведущий-ведомый.
|
|
|
|
|
|
|
|
Jul 8 2016, 22:37
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(khach @ Jul 8 2016, 16:00) А можно по подробнее?
простота совсем не очевидна. Если у Вас отдельный привод на каждое колесо, то до тех пор пока не одно колесо не буксует, всем командуете одинаковый крутящий момент, если колеса начинают буксовать, то командуете так чтоб не одно колесо не раскручивалось скажем на десять процентов больше самого медленного. Самый простой и надежный вариант.
|
|
|
|
|
|
|
|
Jul 9 2016, 10:37
|

Гуру
Группа: Свой
Сообщений: 13 372
Регистрация: 27-11-04
Из: Riga, Latvia
Пользователь №: 1 244
|
QUOTE (oleg_d @ Jul 9 2016, 01:37) Если у Вас отдельный привод на каждое колесо, то до тех пор пока не одно колесо не буксует, всем командуете одинаковый крутящий момент, если колеса начинают буксовать, то командуете так чтоб не одно колесо не раскручивалось скажем на десять процентов больше самого медленного. Самый простой и надежный вариант. При этом это уже будет не простой свободный дифференциал, а уже в чем то самоблокирующийся  . Другое дело, что при приводе на каждое колесо главного эффекта, как от реального дифференциала не будет никогда, поскольку мощность двигателей между колесами НЕ перекидыватся, а только ОГРАНИЧИВАЕТСЯ на одном из колес.
--------------------
Feci, quod potui, faciant meliora potentes
|
|
|
|
|
|
|
|
Jul 9 2016, 11:04
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(oleg_d @ Jul 9 2016, 00:37) если колеса начинают буксовать, то командуете так чтоб не одно колесо не раскручивалось скажем на десять процентов больше самого медленного. Не пойдет- в этом случае буксующее колесо продолжит палить резину. Там очень нелинейное поведение, особенно если после проскальзывания началось горение резины в тонком слое. На самом деле с пробуксовокой в прямолинейном движении справится можно, а вот с пробусковокй в вираже- пока непонятно как. Тем более алгоритм должен правильно взаимодействовать с водителем (быть удобным для водителя) котоырй привык ловить машину в заносе на обычном приводе. Про финты типа полицейского разворота вообще молчу. Как я говорил, я в механике сцепления с дорогой не очень разбираюсь, спецы спрашивали про контроллер где все им необходимые параметры можно получать с контроллеров тяговых двигателей в риалтайме и была бы возможность влезть в любую точку сервоциклов, как параметрами feedforward, так и возможностью подстроить сами сервопетли. Ну и чтение скорости, ускорения, тока итд. Т.е скорее всего им нужен Cyclic Synchronous Torque по Ethercat, если контроллер не особо умный, или полный доступ к параметрам сервоциклов по словарю CiA402 или подобному. Или вот такой режим- два контроллера, в одном происходит авария-пробой силового транзистора. Конечно, срабатывают защиты по питанию. Но при пробитом транзисторе двигатель создает сильный тормозной момент. Так второй контроллер (исправный) должен отрабатывать такой же момент сам в процесс аварийного торможения, чтобы автомобиль на перевернуло. Слабо представляю, какие контроллеры это умеют.
|
|
|
|
|
|
|
|
Jul 9 2016, 12:07
|
Гуру
Группа: Свой
Сообщений: 13 372
Регистрация: 27-11-04
Из: Riga, Latvia
Пользователь №: 1 244
|
QUOTE (khach @ Jul 9 2016, 14:04) Не пойдет- в этом случае буксующее колесо продолжит палить резину. Есть два пути. Первый обычно-привычный в котором, ДА, как и с привычным механическим свободным и/или самомблокируемым дифференциалом будет где-то что-то пробусовывать и палится. Но при этом будет достаточно ПРИВЫЧНОЕ поведение машины. Второй какой-то супер-пупер привод с непривычнным поведенением эмулятора дифференциала, который на самом деле будет очень странным и более того, иметь, как уже писал, врожденный недостаток из за того, что мощность на каждом из колес/осей ограничена мощностью двигателя этого колеса/оси а не суммарной мощностью двгателя автомобиля. Я понимаю, что для абстактой, например, блондинки, управляющей автомобилем действительно хочется формально поддерживать электроникой не допуская пробуксовок (точнее удерживая пробуксовку на каком то уровне зависящем от 100 и 1 фактора ) и все будет "хорошо". Хорошо до того момента, как электроника НЕ сможет поддерживать сие счастье и поведение машины резко изменися. Так что для начала следует разделить понятия эмуляции дифференциала, c чем проблем явных нет вообще и РАЗРАБОТКУ некоего супер-пупер привода для которого функции дифференциала в его класическом виде это только она из частных задач.
--------------------
Feci, quod potui, faciant meliora potentes
|
|
|
|
|
|
|
|
Jul 9 2016, 13:14
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
QUOTE (zltigo @ Jul 9 2016, 13:37) При этом это уже будет не простой свободный дифференциал, а уже в чем то самоблокирующийся . Другое дело, что при приводе на каждое колесо главного эффекта, как от реального дифференциала не будет никогда, поскольку мощность двигателей между колесами НЕ перекидыватся, а только ОГРАНИЧИВАЕТСЯ на одном из колес. Все правильно, по этому, и в виду необходимости как можно больше все массы стянуть к центру автомобиля, мы применяем самоблокирующийеся дифференциалы, на обоих мостах. Цитата(khach @ Jul 9 2016, 14:04) На самом деле с пробуксовокой в прямолинейном движении справится можно, а вот с пробусковокй в вираже- пока непонятно как. Тем более алгоритм должен правильно взаимодействовать с водителем (быть удобным для водителя) котоырй привык ловить машину в заносе на обычном приводе. Про финты типа полицейского разворота вообще молчу. Как уже писал zltigo, для начала надо расставить приоритеты. Цитата Или вот такой режим- два контроллера, в одном происходит авария-пробой силового транзистора. Конечно, срабатывают защиты по питанию. Но при пробитом транзисторе двигатель создает сильный тормозной момент. Так второй контроллер (исправный) должен отрабатывать такой же момент сам в процесс аварийного торможения, чтобы автомобиль на перевернуло. Слабо представляю, какие контроллеры это умеют. Вероятность такого происшествия, при соответствующем исполнении, такая же как у заклинивания подшипника колеса, и что делать с этим.
|
|
|
|
|
|
|
|
Jul 9 2016, 13:42
|
Гуру
Группа: Свой
Сообщений: 13 372
Регистрация: 27-11-04
Из: Riga, Latvia
Пользователь №: 1 244
|
QUOTE (khach @ Jul 9 2016, 14:04) Но при пробитом транзисторе двигатель создает сильный тормозной момент. Так второй контроллер (исправный) должен отрабатывать такой же момент сам в процесс аварийного торможения, чтобы автомобиль на перевернуло. Слабо представляю, какие контроллеры это умеют. Для борьбы с эффектами подобному этому (когда одна из систем выходит из строя) надо использовать И другие системы автомобиля. Например, раздельное управление тормозами каждого из колес БЕЗ участия человека, есть уже давно достаточно обыденная функция. Используется для реализации разнообразных функций, включая, естественно и всякие Electronic stability control и иже с ним. Так что по независимым от каналов привода каналам должна будет получена информация и о блокировке колеса, и о последствиях ввиде возникшего заноса от акселерометров. После чего будет и команда на сброс мощности и на подтормаживание соответствующих колес. Обойтись БЕЗ дублирующих систем обеспечивающих безопасность нельзя.
--------------------
Feci, quod potui, faciant meliora potentes
|
|
|
|
|
|
|
|
Jul 27 2016, 15:15
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Вернемся к нашим баранам,вернее контурам. Вопрос- двигатель щеточный ДС, когда то был тахогенератор для контура скорости. Тахогенератор помер. Заменили на инкрементальный энкодер и вычисляли скорость как длительность тика энкодера. Сервосистема в режиме удержания начала подвозбуждаться. Как можно модифицировать алгоритм обработки сигнала экодера для получения стабильного удержания позиции? Что то типа http://www.diegm.uniud.it/petrella/Azionam...%20Analysis.pdf применить или перейти на SIN/COS энкодер и завести аналоговые сигналы на АЦП как тут http://www.ti.com/lit/ug/tidua05a/tidua05a.pdfPS. контур позиции энкодер не использует, есть внешние оптические линейки на осях. PS2. двухтаймерная обработка энкодера http://www.nxp.com/files/microcontrollers/...mp;fileExt=.pdfнадо будет попробовать.
|
|
|
|
|
|
|
|
Jul 27 2016, 17:45
|
Частый гость
Группа: Участник
Сообщений: 190
Регистрация: 2-03-11
Пользователь №: 63 341
|
Цитата подвозбуждаться Что имеется ввиду? .Плохо держит задание 0? Если да, то варианты: 1. Увеличить число импульсов на оборот энкодера 2. Мерить ширину не между двумя, а между 4,8,...импульсами. Это тоже может помочь. 3. Делать программно резольвер -не самая лучшая затея, потому что наблюдатель, который будет уже скорость восстанавливать, очень чувствителен к шагу дискретизации. Если у вас там конечно не сигнальный процессор. Я это делал в живую...проще сделать наблюдатель на постоянник вообще весь, чем отдельно на датчик скорости.Я не помню какая там оказалась нужна частота дискретизации, но мне пришлось под это дело выделять отдельный процессор и по i2c передавать. 4. Оборвать к фигам энкодер и сделать тупую дубовую о.с. по напряжению с небольшой положительной о.с. по току в контур напряжения 5. Если вообще все плохо и не помогает, то нужно оставить все как есть, но делать наблюдатель постоянника с 3 входами (напряжение, ток скорость) и 1 выходом (адаптированная скорость). Это 100% рабочий вариант буквально с каменным удержанием в нуле и самым хреновым энкодером
Сообщение отредактировал somebody111 - Jul 27 2016, 18:02
|
|
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|























 . По любому у привода уже без всяких дополнительных fuzzy контроллеров дифференциалов обязаны быть и есть управление/поддержка момента и оборотов.
. По любому у привода уже без всяких дополнительных fuzzy контроллеров дифференциалов обязаны быть и есть управление/поддержка момента и оборотов.

