| |
 Сверхточная стабилизация скорости вращения вала электродвигателя. Сверхточная стабилизация скорости вращения вала электродвигателя. |
|
|
|
|
 Jan 18 2017, 22:00 Jan 18 2017, 22:00
|

Ally

Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050

|
Цитата(Vitaly_N @ Jan 18 2017, 11:19)  На роторе используется 4-полюсный постоянный магнит, на статоре две пары катушек и два датчика Холла для управления ими, на катушках статора частота 24 Гц. Ого, 2-х фазный BLDC. Первый раз вижу. Начать надо со съема напряжения обратной ЭДС. Покрутите дрелью мотор и запишите осциллограмму. Скорее всего там будет нечто несинусоидальное. Значит управление должно быть нелинейным. Потом выкинтье те датчики холла и поставьте нормальный абсолютный энкодер. Например магнитный. TLE5012 - класная штука. Потом выкиньте всю схему от VB1 до VT5, VT6 и поставьте туда два полных моста с ШИМ управлением. ATmega не потянет, возьмите ARM Cortex-M4. Могу рекомендовать серию Kinetis от NXP. И просто от энкодера рулите 2-я ШИМ мостами согласно форме записанной ЭДС. В литературе отдельно такой случай с мотором не рассматривают поскольку все вырождается в управление траекторным движением.
|
|
|
|
|
|
|
|
Jan 19 2017, 05:43
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 30-11-07
Пользователь №: 32 839
|
Цитата(AlexandrY @ Jan 19 2017, 05:00) Ого, 2-х фазный BLDC. Первый раз вижу. В вентиляторе кулера на процессоре такой же 2-х фазный BLDC стоит. Вот плата с катушками статора, датчиками Холла и всей остальной электроникой.  Вот ротор  Вот привод в сборе 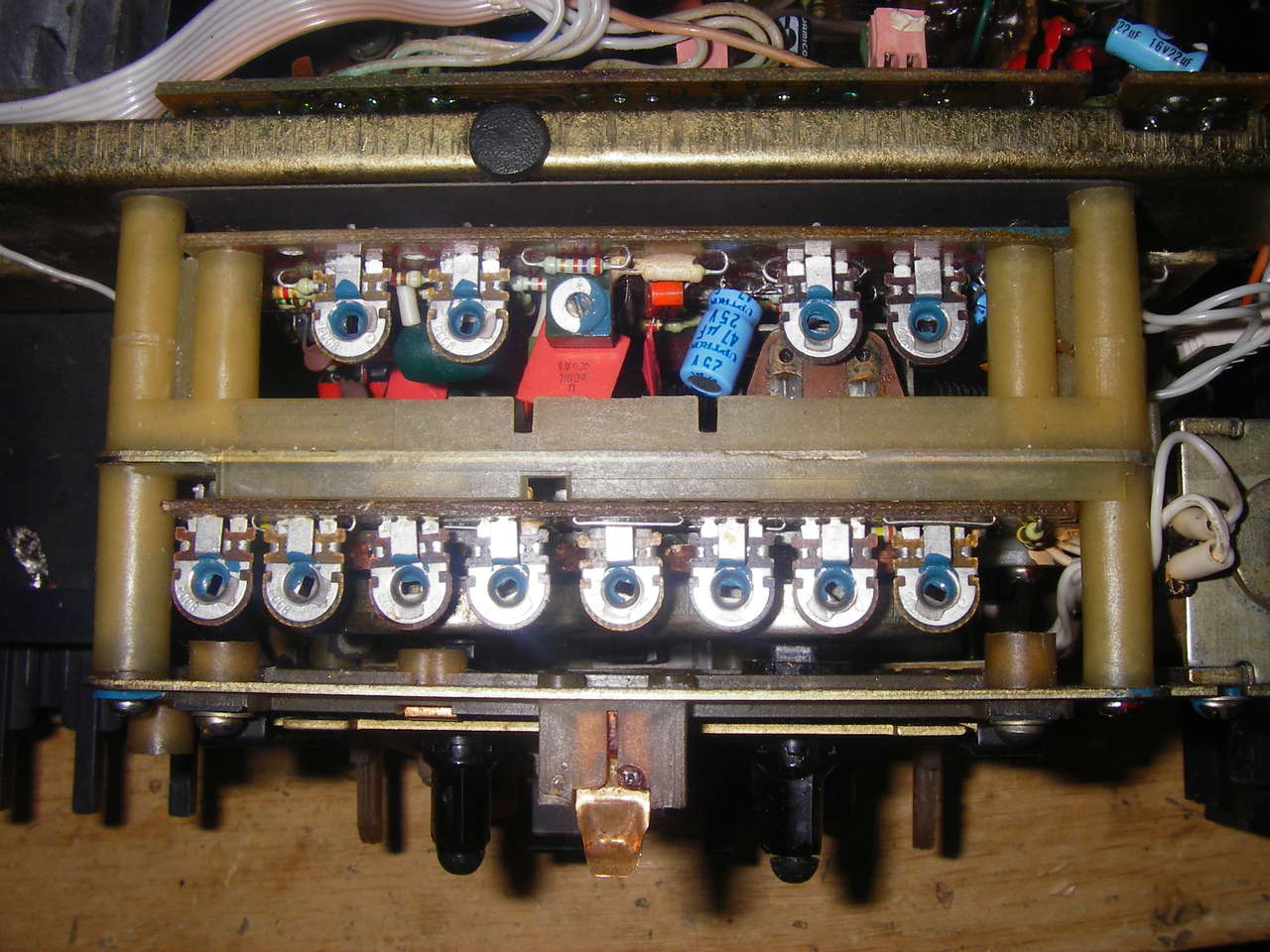
|
|
|
|
|
|
|
|
Jan 21 2017, 12:05
|

Гуру
Группа: Модераторы
Сообщений: 10 983
Регистрация: 23-11-05
Пользователь №: 11 287
|
Цитата(Tanya @ Jan 18 2017, 15:56) Вы бы схему обрезали, чтобы влезла. +1! Цитата(Vitaly_N @ Jan 19 2017, 07:43) Вот привод в сборе И на что любоваться в этой огромной картинке? На количество потенциометров? Для чего она? Цитата(khach @ Jan 21 2017, 13:47) Есть вопрос- тормоз-натяжитель подающего узла электронный (мотор в противотяге) или обычный механический? Судя по тому, что привод трёх-двигательный, логично предположить первое.
|
|
|
|
|
|
|
|
Jan 24 2017, 08:12
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 30-11-07
Пользователь №: 32 839
|
Цитата(khach @ Jan 21 2017, 18:47) Есть вопрос- тормоз-натяжитель подающего узла электронный (мотор в противотяге) или обычный механический? В режиме воспроизведения подающий узел подтормаживается механически, двигатель перемотки назад неактивен.
|
|
|
|
|
|
|
|
Jan 26 2017, 14:26
|
Знающий
Группа: Свой
Сообщений: 869
Регистрация: 30-01-08
Из: СПб
Пользователь №: 34 595
|
Цитата(Vitaly_N @ Jan 18 2017, 14:37) ...
Есть ещё одна гипотеза - это просто частота автоколебаний в контуре регулирования, а то, что оно оказалось кратно частоте вращения вала двигателя - ну так случайно совпало.
... Если действительно что-то из этой серии, то навряд ли случайно. Как вариант, могут появляться проблемы на частотах, кратных полу-частоте регулирования. С ними регулятор может сильно чудить. Попробуйте настроить ПИД-регулятор, подавая на него усреднение последних двух измерений. Если "колебания" исчезнут, значит оно неслучайное и было. Смысл этих действий в том, что такой хреновый фильтр проваливает сигнал в "0" на полу-частоте и кратных частотах при минимально возможной задержке. Сам регулятор станет несколько хуже, но результат может улучшится.
|
|
|
|
|
|
|
|
Jan 28 2017, 13:57
|
Частый гость
Группа: Свой
Сообщений: 197
Регистрация: 15-10-10
Из: г. Москва
Пользователь №: 60 179
|
Цитата Я в упор тут никакого ПИД не вижу на схеме Тем не менее он есть. Не ПИД, а П регулятор. На DA1.2. Дискретный. VT9 схема выборки хранения. Остальное усилитель тока и формирователь фаз. Цитата Схема стабилизации оборотов это какой-то хитрый ШИМ. ШИМ в этой схеме нет. По сути это есть векторный привод. Датчики Холла похоже линейные и формируют вектор момента. Линейный усилитель, напрямую управляет моментом. ПИД в целом может улучшить стабилизацию, но в случае грамотной реализации. Поскольку требуется вычисление дискретной производной и интеграла при плавающей частоте дискретизации. Более эффективным видится,как было сказано выше, подход комбинирующий Цитата управление траекторным движением и несложный пропорциональный регулятор. В целях упрощения отладки, достаточно сохранять вход и выход регулятора Данная конструкция хороша тем, что на номинальной частоте вращения 6 Гц не создает помех в аудиотракте.
|
|
|
|
|
|
|
|
Jan 30 2017, 05:11
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 30-11-07
Пользователь №: 32 839
|
Цитата(khach @ Jan 27 2017, 17:20) Я в упор тут никакого ПИД не вижу на схеме. Вполне естественно - потому что это родная схема. А что сделал я - описано сразу под схемой. Повторяю: Цитата Я выбросил всё от коллектора VT1 до базы VT10 - между ними стоит мой регулятор.
Таймер 0 (8-битный) у меня используется как PWM для формирования выходного напряжения. Выход с него, отфильтрованный через ФНЧ с частотой 1 кГц, подаётся на базу VT10.
Таймер 1 (16 битный) используется для измерения периода и сдвига фаз двух внешних сигналов.
Сигнал опорной частоты 800 Гц я завёл на INT0. По прерыванию с него считываю счётчик таймера 1 (16-битного). Тут соображение такое, что пусть я программно его не очень точно захватываю, зато я знаю, что он регулярный, могу усреднить и подкорректировать.
Сигнал с таходатчика (коллектор VT1) завёл на ICP. Тут всё железно - по сигналу счётчик захватывается в ICR, оттуда в обработчике прерывания спокойно вычитываю и обрабатываю.
|
|
|
|
|
|
|
|
Jan 31 2017, 04:36
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 30-11-07
Пользователь №: 32 839
|
Взял датчик Холла из флопповода и посмотрел им на магнит ротора. Имеется 8 полюсов - 4 S и 4 N, приблизительно равномерно расположенных и приблизительно одинаково намагниченных.
Взял программу SimInTech, задал в ней свою систему и добавил округление до целого (регистр ШИМ 8-битный). Если без округления переходный процесс довольно быстро устаканивался, то с округлением до целого процесс не устаканивается, а на нём образуется "пила" малой амплитуды. Т.е. мой цифровой ПИД-регулятор привносит грубость в управление, что приводит к возникновению автоколебаний ещё и по этой причине.
|
|
|
|
|
|
|
|
Feb 1 2017, 12:32
|
Частый гость
Группа: Свой
Сообщений: 197
Регистрация: 15-10-10
Из: г. Москва
Пользователь №: 60 179
|
Цитата Таймер 0 (8-битный) у меня используется как PWM для формирования выходного напряжения. Выход с него, отфильтрованный через ФНЧ с частотой 1 кГц, подаётся на базу VT10.
Таймер 1 (16 битный) используется для измерения периода и сдвига фаз двух внешних сигналов.
Сигнал опорной частоты 800 Гц я завёл на INT0. По прерыванию с него считываю счётчик таймера 1 (16-битного). Тут соображение такое, что пусть я программно его не очень точно захватываю, зато я знаю, что он регулярный, могу усреднить и подкорректировать. Ок. На Таймер1 можно делать точный захват длительности и генерировать прерывание 800Гц. Комбинируя Таймер0 и Таймер2 внешней логикой можно сгенерить более чем 8-ми битный ШИМ. Или ЦАП уже прикрутить самый доступный. Или даже собрать его, благо ног свободных достаточно.
|
|
|
|
|
|
|
|
Feb 3 2017, 13:53
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 30-11-07
Пользователь №: 32 839
|
Всё! Задача решена! Частота и фаза стоят, как вкопанные! Подобрал коэффициенты ПИД-регулятора, правда, сильно задрал П-компоненту, в результате управляющий сигнал на двигатель сильно скачет, но зато вал крутится очень равномерно и стабильно. Даже при старте воспроизведения с кассетой уползание фазы пренебрежимо мало. Потом как-нибудь аккуратно померю девиацию - доложу. А пока результат меня абсолютно устраивает. https://youtu.be/6T1rNlHNHKU
Сообщение отредактировал Vitaly_N - Feb 3 2017, 15:20
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|


























