| |
|
  |
 Контролер для 3-х двигателей. Контролер для 3-х двигателей. |
|
|
|
|
 Oct 28 2017, 12:16 Oct 28 2017, 12:16
|
Гуру

Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741

|
Цитата(Jenya7 @ Oct 27 2017, 10:41)  Я бы с большим удовольствием поставил FPGA но цены на них сумашедшие. Цены на них очень приемлемы, особенно с появлением дешевых китайских плат с Циклонами4. Много конструкций на них появилось в последнее время. Но вот вопрос- какую архитектуру Вы планируете впихнуть в эту FPGA? Будет синтезированное ядро типа ARM или MIPS c сопроцессором плавающей точки для рассчета траектории движения или только ШИМ таймера и таймера-счетчики энкодеров а процессор внешний? Потому что эти два подхода очень разные по требованию к обьему и быстродействию FPGA. Последняя философия реализована в картах mesa drive http://www.mesanet.com/, для которых и исходники прошивок есть и их достаточно легко адаптировать под любую ПЛИС, хотя изначально там Xilinx применен. Данные для движения им готовит хост- компьютер, и подает или по PCI, или по Ethernet готовые микрокадры движения. Петли обратной связи по позиции замкнуты через софт. Хотя после долгого перерыва у них появилась и карта с микропроцессором. 4C81 - WIRELESS ORIENTED PC/104-PCI CPU http://www.mesanet.com/cpucardinfo.html но там полноценный линух используется в виде NetBSD. Соответственно можно пакет править под свои задачи, но это не так уж просто.
|
|
|
|
|
|
|
|
Oct 29 2017, 08:07
|
Гуру
Группа: Участник
Сообщений: 2 219
Регистрация: 16-08-12
Из: Киров
Пользователь №: 73 143
|
Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне нужно сделать драйвер для 3-х двигателей. Двигатели обычные DC Motors 24V. Двигатели имеют энкодеры для отслеживания позиции. Не знаю, говорилось тут или нет, но зачем тут энкодеры?? Точность в ед. градусов не получить, направление и так известно, достаточно простого датчика оборотов, скажем на магнитоуправляемой МС и простого счетчика в МК. Зачем усложнять себе жизнь? Цитата(HardEgor @ Oct 27 2017, 15:09) Странно. Вы наверное смотрите что-то из последних моделей, недавно присмотрел себе серию SmartFusion Microsemi - это AFE+Cortex-M3+FPGA в одном чипе, например A2F060 550р. в корпусе TQFP-144. Вот уж ПЛИСы здесь точно из пушки по комарам 
|
|
|
|
|
|
|
|
Oct 29 2017, 08:31
|
Гуру
Группа: Участник
Сообщений: 3 928
Регистрация: 28-03-07
Из: РФ
Пользователь №: 26 588
|
Цитата(Jenya7 @ Oct 27 2017, 09:41) Но сейчас поставлена задача - управлять пятью моторами. Есть камень с достаточными ресурсами? а завтра вам поставят задачу управлять шестью с половиной моторами, опять будете искать новый камень ? вместо того, чтобы взять раз и навсегда один какой-нибудь за доллар короче, сериал мыши и кактус Цитата(mantech @ Oct 29 2017, 09:07) Вот уж ПЛИСы здесь точно из пушки по комарам эта, ничего вы не понимаете, плисы - это это же нереальна крута, обязательно нужно ставить везде в куда попало
Сообщение отредактировал Огурцов - Oct 29 2017, 08:31
|
|
|
|
|
|
|
|
Oct 29 2017, 12:55
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
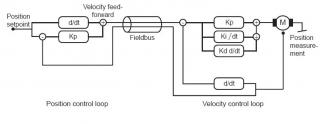
Цитата(Огурцов @ Oct 29 2017, 14:24) а тригонометрию вы покупали ? Нет, CORDIC использовали условно-бесплатный для аппроксимации траектории между базовых точек. На самом деле это был жуткий колхоз, т.к сначала предполагалось использовать станок в режиме нарезания резьбы метчиками ( синхронная с вращением шпинделя подача по Z оси) но конструкторы промахнулись по моменту привода шпинделя). Тогда появилась идея с фрезерованием резьбы, но используемые контроллеры при интерполяции делали граненные отверстия, куда винты не вкручивались. И тогда была слеплена приспособа на ПЛИС которая в режиме step-dir рулила приводами в "ручном режиме" в цикле фрезерования резьбы, при этом грубая траектория прогружалась в виде таблицы снаружи, а ПЛИС занималась интерполяцией траектории и синхронизацией всех осей. Я к тому, что это весьма специфический случай был и межконтроллерное взаимодействие ( каждая ось привода имела свой сервоконтроллер промышленный и отдельный контроллер оптической линейки) не справилось с задачей т пришлось лепить костыли. Если бы там был EtherCAT, то возможно бы и успели, но был обычный profibus. Тут вся проблема, как делить петлю обратной связи относительно интерфейса и успеет ли она в риалтайме. Как пример картинка.
PS. http://www.iftomm2015.tw/IFToMM2015CD/PDF/OS13-011.pdfВот такое потяните в одиночку?
|
|
|
|
|
|
|
|
Oct 29 2017, 14:14
|
Гуру
Группа: Участник
Сообщений: 3 928
Регистрация: 28-03-07
Из: РФ
Пользователь №: 26 588
|
Цитата(khach @ Oct 29 2017, 12:55) условно-бесплатный это и пугает - условно-бесплатный условно подходит только лишь для какого-то одного конкретного заказчика значит поэтому это должен быть мегатолстый закачик писать же самому тригонометрию, да с плавучкой - пупок развяжется Цитата(khach @ Oct 29 2017, 12:55) ПЛИС занималась интерполяцией траектории да я ж не убеждаю, что не получится просто я тоже прошёлся по этим граблям в несколько итераций и в результате вернул всё взад, на мк, где оно просто и удобно Цитата(khach @ Oct 29 2017, 12:55) Если бы там был EtherCAT, то возможно бы и успели, но был обычный profibus. обычный profibus, это который медный на уарте ? ну ой, взяли бы хотя бы голый уарт, сильно урезавшись в хотелках, можно было организовать обмен, иначе никак сразу ethercat - другая крайность, эзернета было бы достаточно, хотя да, это должен был быть точно не обычный эзернет, обычный легко может случиться медленнее чем profibus Цитата(khach @ Oct 29 2017, 12:55) Вот такое потяните в одиночку? да всё что угодно, буде время и деньги
Сообщение отредактировал Огурцов - Oct 29 2017, 14:20
|
|
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|