| |
 Контролер для 3-х двигателей. Контролер для 3-х двигателей. |
|
|
|
|
 Jul 2 2017, 08:31 Jul 2 2017, 08:31
|
Профессионал

Группа: Участник
Сообщений: 1 778
Регистрация: 29-03-12
Пользователь №: 71 075

|
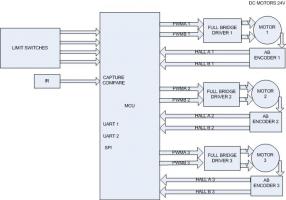
Мне нужно сделать драйвер для 3-х двигателей. Двигатели обычные DC Motors 24V. Двигатели имеют энкодеры для отслеживания позиции. Хотелось чтоб энкодеры были апаратные. Обычно это делается на таймерах. Вот задумался какой контроллер выбрать. PWM+Encoders требуют таймера. К тому же на мои нужды нужно еще 3 таймера. У ST вроде нет контролеров заточенных под motion. У TI есть но что то не хочется связываться с TI. К тому же 3 двигателя. Есть контроллеры под такую задачу? Основная проблема - аппаратно обработать 3 энкодера. На атмеловских AVRках я пользовался внешними интераптами но это, как мне кажется, не очень хороший способ.
Эскизы прикрепленных изображений
|
|
|
|
|
|
Сообщений в этой теме
 Jenya7 Контролер для 3-х двигателей. Jul 2 2017, 08:31 Jenya7 Контролер для 3-х двигателей. Jul 2 2017, 08:31 sigmaN У ST есть всё для моторов и даже библиотека имеетс... Jul 2 2017, 15:19 sigmaN У ST есть всё для моторов и даже библиотека имеетс... Jul 2 2017, 15:19 AlexandrY Цитата(sigmaN @ Jul 2 2017, 18:19) У ST е... Jul 2 2017, 15:54 oleg_d У семейства XMC4000 есть все что надо но только дл... Jul 2 2017, 15:55 AlexandrY Цитата(sigmaN @ Jul 2 2017, 18:19) У ST е... Jul 2 2017, 15:54 oleg_d У семейства XMC4000 есть все что надо но только дл... Jul 2 2017, 15:55 Jenya7 Цитата(sigmaN @ Jul 2 2017, 20:19) У ST е... Jul 2 2017, 16:33 sigmaN Кстати по ходу у ТСа коллекторные движки и там всё... Jul 2 2017, 15:56 AlexandrY Цитата(sigmaN @ Jul 2 2017, 18:56) Кстати... Jul 2 2017, 16:01 sigmaN Я щас тоже только что так подумал ) Jul 2 2017, 16:02 EmbedElektrik параметры энкодера и частота вращения какие? при 1... Jul 2 2017, 20:47 Jenya7 Цитата(EmbedElektrik @ Jul 3 2017, 01:47)... Jul 3 2017, 05:46 Эдди Цитата(EmbedElektrik @ Jul 2 2017, 23:47)... Jul 3 2017, 11:12 sigmaN Ну так надо сначала ж выбрать энкодеры исходя из т... Jul 3 2017, 09:04 Jenya7 Цитата(sigmaN @ Jul 3 2017, 14:04) Ну так... Jul 3 2017, 09:43 HardEgor Цитата(Jenya7 @ Jul 3 2017, 16:43) А проб... Jul 3 2017, 17:11 Эдди Цитата(HardEgor @ Jul 3 2017, 20:11) Возм... Jul 3 2017, 22:21 Maverick Цитата(Эдди @ Jul 4 2017, 01:21) Вот это,... Jul 3 2017, 22:43 Огурцов Цитата(Maverick @ Jul 3 2017, 23:43) заче... Jul 4 2017, 02:01 HardEgor Цитата(Maverick @ Jul 4 2017, 05:43) Возм... Jul 4 2017, 05:00 Эдди Цитата(Maverick @ Jul 4 2017, 01:43) Возм... Jul 4 2017, 05:17 jcxz Цитата(sigmaN @ Jul 3 2017, 12:04) А ведь... Jul 4 2017, 10:40 sigmaN Проблема в том, что ваша система не должна допусти... Jul 3 2017, 10:24 sigmaN Цитатаи вопрос "определить текущую скорость в... Jul 3 2017, 13:14 Maverick Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне ну... Jul 3 2017, 20:04 Jenya7 Цитата(Maverick @ Jul 4 2017, 02:04) так ... Jul 4 2017, 06:38 khach Для надежности как раз и применяют два STM32 - оди... Jul 4 2017, 07:19 sigmaN ЦитатаА нужно-ли принимать решение на каждом импул... Jul 4 2017, 15:05 jcxz Цитата(sigmaN @ Jul 4 2017, 18:05) Ну учи... Jul 4 2017, 15:11 sigmaN ЦитатаБольшое кол-во импульсов - это только для ув... Jul 4 2017, 15:54 jcxz Цитата(sigmaN @ Jul 4 2017, 18:54) Правил... Jul 4 2017, 16:40 khach Энкодер с аппаратным таймером считает все импульсы... Jul 4 2017, 17:45 sigmaN Ну если счётчик аппаратный тогда ОК Jul 4 2017, 20:00 Jenya7 Решил вернутся к теме. То есть как решил - жизнь з... Oct 27 2017, 08:41 HardEgor Цитата(Jenya7 @ Oct 27 2017, 15:41) Я бы ... Oct 27 2017, 12:09 Jenya7 Цитата(HardEgor @ Oct 27 2017, 17:09) Стр... Oct 27 2017, 12:13 khach Цитата(Jenya7 @ Oct 27 2017, 10:41) Я бы ... Oct 28 2017, 12:16 Jenya7 спасибо. посмотрю. Oct 29 2017, 06:32 Огурцов Цитата(Jenya7 @ Oct 27 2017, 09:41) Но се... Oct 29 2017, 08:31 khach Цитата(Огурцов @ Oct 29 2017, 10:31) эта,... Oct 29 2017, 09:35 Огурцов Цитата(khach @ Oct 29 2017, 10:35) На мик... Oct 29 2017, 12:24 khach Цитата(Огурцов @ Oct 29 2017, 14:24) а тр... Oct 29 2017, 12:55 Огурцов Цитата(khach @ Oct 29 2017, 12:55) условн... Oct 29 2017, 14:14 khach Цитата(Огурцов @ Oct 29 2017, 16:14) обыч... Oct 29 2017, 14:36 mantech Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне ну... Oct 29 2017, 08:07 Jenya7 Прихожу к мысли, что нужно делать модуль контроль+... Oct 29 2017, 10:04 mantech Цитата(Jenya7 @ Oct 29 2017, 13:04) Прихо... Oct 29 2017, 11:08 Jenya7 Вот решение близко к идеальному. https://geektim... Oct 29 2017, 12:25 gosha-z Цитата(Jenya7 @ Oct 29 2017, 15:25) Вот р... Oct 29 2017, 14:40 AlexandrY Цитата(Jenya7 @ Oct 29 2017, 14:25) Вот р... Oct 29 2017, 14:58 khach Цитата(AlexandrY @ Oct 29 2017, 16:58) В ... Oct 29 2017, 15:35 Огурцов Цитата(khach @ Oct 29 2017, 16:35) canope... Oct 29 2017, 16:37 khach Цитата(Огурцов @ Oct 29 2017, 18:37) вам ... Oct 29 2017, 17:04 Огурцов Цитата(khach @ Oct 29 2017, 18:04) Вообще... Oct 30 2017, 00:20 khach Цитата(Огурцов @ Oct 30 2017, 02:20) can ... Oct 30 2017, 10:53 jcxz Цитата(khach @ Oct 30 2017, 13:53) Контро... Oct 30 2017, 11:33 mantech Цитата(khach @ Oct 30 2017, 13:53) Эзерне... Oct 30 2017, 11:38 jcxz Цитата(mantech @ Oct 30 2017, 14:35) чтоб... Oct 30 2017, 11:41 khach Цитата(jcxz @ Oct 30 2017, 13:41) У меня ... Oct 30 2017, 12:02 jcxz Цитата(khach @ Oct 30 2017, 15:02) Ну у н... Oct 30 2017, 12:18 khach Цитата(jcxz @ Oct 30 2017, 14:18) Ну это ... Oct 30 2017, 12:34 jcxz Цитата(khach @ Oct 30 2017, 15:34) Интерс... Oct 30 2017, 12:46 AlexandrY Цитата(jcxz @ Oct 30 2017, 14:18) Прерыва... Oct 30 2017, 13:24 jcxz Цитата(AlexandrY @ Oct 30 2017, 16:24) А ... Oct 30 2017, 13:38 mantech Цитата(jcxz @ Oct 30 2017, 16:38) А что -... Oct 30 2017, 14:31 Огурцов Цитата(khach @ Oct 30 2017, 11:53) Контро... Oct 30 2017, 12:22 AlexandrY Цитата(khach @ Oct 29 2017, 17:35) Это хо... Oct 29 2017, 18:29 Jenya7 Цитата(AlexandrY @ Oct 29 2017, 19:58) Хо... Oct 30 2017, 07:11 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 09:11) а где... Oct 30 2017, 07:34 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 12:34) От... Oct 30 2017, 07:43 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 09:43) да. с... Oct 30 2017, 08:51 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 13:51) Пе... Oct 30 2017, 09:22 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 11:22) понял... Oct 30 2017, 09:33 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 14:33) Бе... Oct 30 2017, 09:38 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 11:38) я пон... Oct 30 2017, 10:07 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 15:07) Ес... Oct 30 2017, 10:40 Dog Pawlowa 5 страниц, задача не озвучена.
Управление мотором:... Oct 30 2017, 16:20 Jenya7 Нашел вот такое чудо.
http://www.allegromicro.com/... Nov 15 2017, 08:22 Tanya Цитата(Jenya7 @ Nov 15 2017, 11:22) Это ж... Nov 15 2017, 08:29 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 10:22) Нашел... Nov 15 2017, 09:52 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 15:52) Он... Nov 15 2017, 10:02 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 11:56) А есл... Nov 15 2017, 10:07 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:07) То... Nov 15 2017, 10:10 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 12:10) там т... Nov 15 2017, 10:20 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:20) Да... Nov 15 2017, 10:37 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 12:37) так м... Nov 15 2017, 10:46 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:46) А ... Nov 15 2017, 11:00 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 13:00) ну во... Nov 15 2017, 11:05 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 17:05) TA... Nov 15 2017, 11:14 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 13:14) а как... Nov 15 2017, 12:08 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 18:08) Си... Nov 15 2017, 12:22 mantech Цитата(Jenya7 @ Nov 15 2017, 13:02) Не по... Nov 15 2017, 13:12 Jenya7 Цитата(mantech @ Nov 15 2017, 19:12) В че... Nov 15 2017, 13:27 mantech Цитата(Jenya7 @ Nov 15 2017, 16:27) боязн... Nov 15 2017, 19:01 Aner QUOTE (Jenya7 @ Nov 15 2017, 12:22) Нашел... Nov 15 2017, 09:53 Jenya7 Цитата(sigmaN @ Jul 2 2017, 20:19) У ST е... Jul 2 2017, 16:33 sigmaN Кстати по ходу у ТСа коллекторные движки и там всё... Jul 2 2017, 15:56 AlexandrY Цитата(sigmaN @ Jul 2 2017, 18:56) Кстати... Jul 2 2017, 16:01 sigmaN Я щас тоже только что так подумал ) Jul 2 2017, 16:02 EmbedElektrik параметры энкодера и частота вращения какие? при 1... Jul 2 2017, 20:47 Jenya7 Цитата(EmbedElektrik @ Jul 3 2017, 01:47)... Jul 3 2017, 05:46 Эдди Цитата(EmbedElektrik @ Jul 2 2017, 23:47)... Jul 3 2017, 11:12 sigmaN Ну так надо сначала ж выбрать энкодеры исходя из т... Jul 3 2017, 09:04 Jenya7 Цитата(sigmaN @ Jul 3 2017, 14:04) Ну так... Jul 3 2017, 09:43 HardEgor Цитата(Jenya7 @ Jul 3 2017, 16:43) А проб... Jul 3 2017, 17:11 Эдди Цитата(HardEgor @ Jul 3 2017, 20:11) Возм... Jul 3 2017, 22:21 Maverick Цитата(Эдди @ Jul 4 2017, 01:21) Вот это,... Jul 3 2017, 22:43 Огурцов Цитата(Maverick @ Jul 3 2017, 23:43) заче... Jul 4 2017, 02:01 HardEgor Цитата(Maverick @ Jul 4 2017, 05:43) Возм... Jul 4 2017, 05:00 Эдди Цитата(Maverick @ Jul 4 2017, 01:43) Возм... Jul 4 2017, 05:17 jcxz Цитата(sigmaN @ Jul 3 2017, 12:04) А ведь... Jul 4 2017, 10:40 sigmaN Проблема в том, что ваша система не должна допусти... Jul 3 2017, 10:24 sigmaN Цитатаи вопрос "определить текущую скорость в... Jul 3 2017, 13:14 Maverick Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне ну... Jul 3 2017, 20:04 Jenya7 Цитата(Maverick @ Jul 4 2017, 02:04) так ... Jul 4 2017, 06:38 khach Для надежности как раз и применяют два STM32 - оди... Jul 4 2017, 07:19 sigmaN ЦитатаА нужно-ли принимать решение на каждом импул... Jul 4 2017, 15:05 jcxz Цитата(sigmaN @ Jul 4 2017, 18:05) Ну учи... Jul 4 2017, 15:11 sigmaN ЦитатаБольшое кол-во импульсов - это только для ув... Jul 4 2017, 15:54 jcxz Цитата(sigmaN @ Jul 4 2017, 18:54) Правил... Jul 4 2017, 16:40 khach Энкодер с аппаратным таймером считает все импульсы... Jul 4 2017, 17:45 sigmaN Ну если счётчик аппаратный тогда ОК Jul 4 2017, 20:00 Jenya7 Решил вернутся к теме. То есть как решил - жизнь з... Oct 27 2017, 08:41 HardEgor Цитата(Jenya7 @ Oct 27 2017, 15:41) Я бы ... Oct 27 2017, 12:09 Jenya7 Цитата(HardEgor @ Oct 27 2017, 17:09) Стр... Oct 27 2017, 12:13 khach Цитата(Jenya7 @ Oct 27 2017, 10:41) Я бы ... Oct 28 2017, 12:16 Jenya7 спасибо. посмотрю. Oct 29 2017, 06:32 Огурцов Цитата(Jenya7 @ Oct 27 2017, 09:41) Но се... Oct 29 2017, 08:31 khach Цитата(Огурцов @ Oct 29 2017, 10:31) эта,... Oct 29 2017, 09:35 Огурцов Цитата(khach @ Oct 29 2017, 10:35) На мик... Oct 29 2017, 12:24 khach Цитата(Огурцов @ Oct 29 2017, 14:24) а тр... Oct 29 2017, 12:55 Огурцов Цитата(khach @ Oct 29 2017, 12:55) условн... Oct 29 2017, 14:14 khach Цитата(Огурцов @ Oct 29 2017, 16:14) обыч... Oct 29 2017, 14:36 mantech Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне ну... Oct 29 2017, 08:07 Jenya7 Прихожу к мысли, что нужно делать модуль контроль+... Oct 29 2017, 10:04 mantech Цитата(Jenya7 @ Oct 29 2017, 13:04) Прихо... Oct 29 2017, 11:08 Jenya7 Вот решение близко к идеальному. https://geektim... Oct 29 2017, 12:25 gosha-z Цитата(Jenya7 @ Oct 29 2017, 15:25) Вот р... Oct 29 2017, 14:40 AlexandrY Цитата(Jenya7 @ Oct 29 2017, 14:25) Вот р... Oct 29 2017, 14:58 khach Цитата(AlexandrY @ Oct 29 2017, 16:58) В ... Oct 29 2017, 15:35 Огурцов Цитата(khach @ Oct 29 2017, 16:35) canope... Oct 29 2017, 16:37 khach Цитата(Огурцов @ Oct 29 2017, 18:37) вам ... Oct 29 2017, 17:04 Огурцов Цитата(khach @ Oct 29 2017, 18:04) Вообще... Oct 30 2017, 00:20 khach Цитата(Огурцов @ Oct 30 2017, 02:20) can ... Oct 30 2017, 10:53 jcxz Цитата(khach @ Oct 30 2017, 13:53) Контро... Oct 30 2017, 11:33 mantech Цитата(khach @ Oct 30 2017, 13:53) Эзерне... Oct 30 2017, 11:38 jcxz Цитата(mantech @ Oct 30 2017, 14:35) чтоб... Oct 30 2017, 11:41 khach Цитата(jcxz @ Oct 30 2017, 13:41) У меня ... Oct 30 2017, 12:02 jcxz Цитата(khach @ Oct 30 2017, 15:02) Ну у н... Oct 30 2017, 12:18 khach Цитата(jcxz @ Oct 30 2017, 14:18) Ну это ... Oct 30 2017, 12:34 jcxz Цитата(khach @ Oct 30 2017, 15:34) Интерс... Oct 30 2017, 12:46 AlexandrY Цитата(jcxz @ Oct 30 2017, 14:18) Прерыва... Oct 30 2017, 13:24 jcxz Цитата(AlexandrY @ Oct 30 2017, 16:24) А ... Oct 30 2017, 13:38 mantech Цитата(jcxz @ Oct 30 2017, 16:38) А что -... Oct 30 2017, 14:31 Огурцов Цитата(khach @ Oct 30 2017, 11:53) Контро... Oct 30 2017, 12:22 AlexandrY Цитата(khach @ Oct 29 2017, 17:35) Это хо... Oct 29 2017, 18:29 Jenya7 Цитата(AlexandrY @ Oct 29 2017, 19:58) Хо... Oct 30 2017, 07:11 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 09:11) а где... Oct 30 2017, 07:34 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 12:34) От... Oct 30 2017, 07:43 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 09:43) да. с... Oct 30 2017, 08:51 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 13:51) Пе... Oct 30 2017, 09:22 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 11:22) понял... Oct 30 2017, 09:33 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 14:33) Бе... Oct 30 2017, 09:38 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 11:38) я пон... Oct 30 2017, 10:07 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 15:07) Ес... Oct 30 2017, 10:40 Dog Pawlowa 5 страниц, задача не озвучена.
Управление мотором:... Oct 30 2017, 16:20 Jenya7 Нашел вот такое чудо.
http://www.allegromicro.com/... Nov 15 2017, 08:22 Tanya Цитата(Jenya7 @ Nov 15 2017, 11:22) Это ж... Nov 15 2017, 08:29 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 10:22) Нашел... Nov 15 2017, 09:52 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 15:52) Он... Nov 15 2017, 10:02 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 11:56) А есл... Nov 15 2017, 10:07 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:07) То... Nov 15 2017, 10:10 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 12:10) там т... Nov 15 2017, 10:20 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:20) Да... Nov 15 2017, 10:37 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 12:37) так м... Nov 15 2017, 10:46 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:46) А ... Nov 15 2017, 11:00 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 13:00) ну во... Nov 15 2017, 11:05 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 17:05) TA... Nov 15 2017, 11:14 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 13:14) а как... Nov 15 2017, 12:08 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 18:08) Си... Nov 15 2017, 12:22 mantech Цитата(Jenya7 @ Nov 15 2017, 13:02) Не по... Nov 15 2017, 13:12 Jenya7 Цитата(mantech @ Nov 15 2017, 19:12) В че... Nov 15 2017, 13:27 mantech Цитата(Jenya7 @ Nov 15 2017, 16:27) боязн... Nov 15 2017, 19:01 Aner QUOTE (Jenya7 @ Nov 15 2017, 12:22) Нашел... Nov 15 2017, 09:53
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|