Здравствуйте.
Имеется моментный двигатель (коммутация звезда)
UTH-76 от Celera Motion (в девичестве Applimotion).
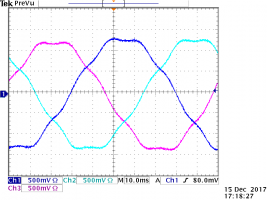
Были сняты осциллограммы линейных напряжений при принудительном вращении ротора (считай, Back EMF):
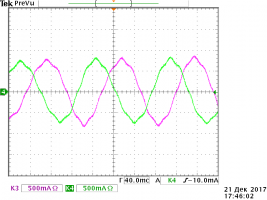
и фазных токов при закорачивании всех фаз опять-таки при принудительном вращении ротора (тока 3-й фазы нет, т. к. нет третьего щупа):
Задача (эксперимент): обеспечить плавное перемещение ротора со скоростью примерно 0,1 град./с. Управление разомкнутое (датчик на основе магнитного кольца имеется, но в этом эксперименте не используется), т. е. в первом приближении - как шаговик.
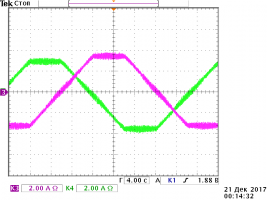
Коммутацией трёх полумостов достигаем такой формы токах в фазах (чтобы повторить форму Back EMF, полученную при эксперименте с принудительным вращением ротора):
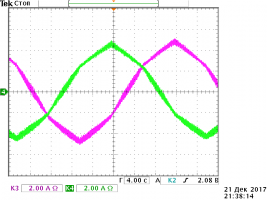
или такой (чтобы повторить форму токов, полученную при эксперименте с принудительным вращением ротора):
Итог один - зависимость момента от угла поворота: в точке максимума (по модулю) двух токов момент максимален, а в точке пересечения любых двух токов (когда третий максимален по модулю) момент минимален, причём не просто минимален, а практически исчезает (будто двигатель обесточен, хотя ток потребеления от источника при этом почти не уменьшается), что вызывает резкий перескок на следующий полюс, когда соотношение токов немного качнётся дальше; разумеется, всё это повторяется циклично (напомню, вращение очень медленное - 0,1 град./с и меньше). Правильней сказать, что сам эффект есть всегда, только вот он максимален в одном месте, а минимален в другом.
Это похоже на известное явление cogging torque, при котором происходит изменение момента от угла, но этот эффект в худшем случае должен составлять 15%, а не приводить полной потере момента.
Вопрос: как обеспечить сохранение момента (свести к минимуму его флуктуации) на всех углах, т. е. в чём ошибка в создании формы токов в фазах?
Ещё раз отмечу:
- обратная связь сейчас не используется намеренно, т. к. скорость вращения очень мала;
- цель эксперимента не само вращение, а обеспечение сохранности момента на всех углах.
Литературы по управлению электроприводом имеется достаточно (в т. ч. по по векторному), но вся она сводится к вращению двигателя на скоростях с максимальной эффективностью, не решая задачу точного позиционирования и удержания угла.
Спасибо.

















 Dec 21 2017, 18:50
Dec 21 2017, 18:50