| |
 предусилитель для пьезокерамического гидрофона предусилитель для пьезокерамического гидрофона |
|
|
|
|
 Sep 5 2013, 08:59 Sep 5 2013, 08:59
|
Группа: Новичок
Сообщений: 4
Регистрация: 4-09-13
Из: СПб, Россия
Пользователь №: 78 184

|
Добрый день. Имеется пассивный гидрофон и 30 м кабеля (две жилы в экране). Для работы с ним необходимо собрать предусилитель с коэффициентом усиления порядка 10-20. Предусилитель должен быть размещён в корпусе гидрофона и иметь фантомное питание. Возможно, у кого найдётся готовое схемотехническое решение? Спасибо.
|
|
|
|
|
|
|
 |
Ответов
(120 - 134)
|
|
Jul 2 2018, 03:12
|
Группа: Участник
Сообщений: 12
Регистрация: 23-06-18
Пользователь №: 105 415
|
Цитата(rudy_b @ Jun 29 2018, 14:48)  Датчик у вас широкополосный 50Гц-50кГц, поэтому, в случае ЗЧУ, его импеданс, практически, определяется его емкостью (7нФ по вашим данным) и существенно (с точки зрения шумов) зависит от частоты.
Так, при этом импедансе, на частоте 50 Гц токовый шум 200 fa будет давать добавку в 90 мкв (U=I * Xc(50 Гц)), а на 50 кГц этот вклад снизится до 90 нВ.
Соответственно вам следует выбирать опера с минимальным токовым шумом. я пересчитал по вашей формуле для 50 Гц получается не 90мкв а 90 нВ, а для 50Кгц 90пВ соответсвенно. Что получается на практике, на АЦП у меня приходит где то 100 семплов, это около 0,004577 В , у меня 2 каскада первый К(1)=31 второй К(2)=60, общий К=1860, получаем из этого 2,46 мкВ, далее делим на корень из полосы пропускания берем 60кГЦ ето примерно 244, в итоге получаем примерно 10 нВ ( в каком то иностарном источнике помоему от AD видел что еше надо делить на 1,56) ну и если поделить то получаем 6,4 нВ. Цитата(Alexashka @ Jun 30 2018, 11:07) 2 damasking: вот поэтому я и просил полную схему (с номиналами всех элементов), т.к было желание проверить в симуляторе. в Обратной связи 220пФ и 1 МОМ ну и получаем частоту среза 680 Гц. Цитата(Alexashka @ Jun 30 2018, 20:54) rudy_b не про то речь шла. Вы умножаете шумовой ток на импеданс датчика (U=I * Xc(50 Гц)) и считаете это как прибавку по шумам на выходе. Всё так если б датчик был подключен к НЕинвертирующему входу ОУ.
У ЗЧУ всё несколько иначе - там датчик подключен к инвертирующему входу, соответственно шумовой ток самого ОУ как и ток с датчика складываются, как в усилителе тока. При этом емкость датчика (и его импеданс, в разумных пределах ессно) не играет рояли.
Если считать отношение сигнал/шум, то емкость датчика тут опять же не причем, т.к если мы рассматриваем заряд генерируемый датчиком, то он не зависит от его емкости.
А вот с шумами напряжения всё гораздо хуже. Во-первых напряженческий шум ОУ усиливается им же в К=Сд/Cос раз (т.е как отношение емкости датчика к емкости обратной связи). Во-вторых, этот шум усиливается практически во всей полосе пропускания усилителя (т.е десятки кГц), в отличие от токового шума,который дает вклад только до частоты среза цепи ОС (обычно единицы-десятки Гц). И в третьих, внутреннее активное сопротивление датчика тоже создает тепловой (джонсоновский) шум, который также усиливается в К раз. Всё это в купе и дает эффект гораздо больший, чем токовые шумы ОУ, отсюда и результат - ОУ с малыми шумами по напряжению оказываются лучше. Получая на практике результаты тоже начинаю склоняться что ОУ с малыми шумами по напряжению лучше в данном случае, перепробовав почти все ОУ с малыми шумами по току, можете посоветовать какие нибудь ОУ с малыми шумами по напряжению и умеренным входным током. Сам же конечно поищу, но возможно найдется вариант побыстрее. ЗЧУ с малым входным током наверно необходимы для низкочастотных сигналов( какие нибудь детекторы ион частиц), там получается сопротивление очень большое(на низких частотах)
|
|
|
|
|
|
|
|
Jul 2 2018, 22:49
|
Знающий

Группа: Свой
Сообщений: 888
Регистрация: 25-09-08
Из: Питер
Пользователь №: 40 458
|
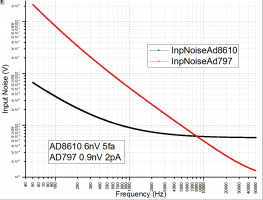
Просто, для примера - расчет входного шума по моделям для AD8610 (JFET, 6nV, 5fA) и AD797(0.9 nV, 2pA). Модели фабричные, Orcad PSpice Спектральная плотность входного шума В/Sqrt(HZ)
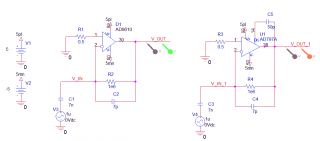
Схема
Как видно, опер с меньшим шумовым током дает намного меньший шум на низких частотах, несмотря на то, что его напряженческий шум в 6 раз выше. А опер с малым шумовым напряжением выигрывает на высоких частотах.
|
|
|
|
|
|
|
|
Jul 3 2018, 18:55
|

Практикующий маг
Группа: Свой
Сообщений: 3 634
Регистрация: 28-04-05
Из: Дубна, Моск.обл
Пользователь №: 4 576
|
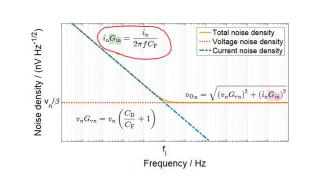
Цитата(rudy_b @ Jul 1 2018, 23:03) Alexashka, вы неправы, попробуйте на модели, сами убедитесь. Отрубите ОС в опере - какой будет сигнал? А включение ОС одинаково ослабит и сигнал и шум, т.е. отношение сигнал/шум не изменится, поскольку входной заряд - уже сумма входного сигнала и шумового заряда, обусловленного шумовым током опера. PS. Посмотри тут, страница 20 и далее. Ув. rudy_b, услышьте меня наконец  О чем я толкую! Я пытаюсь донести, что импеданс датчика в случае рассмотрения шумовых токов НЕ ИГРАЕТ РОЛИ. Вот даже в Вашей же статье на стр.22 видим формулу передаточной функции для шумовых токов Gin:
Gin = 1/(2*pi*f*Cf), где Cf - емкость обратной связи. Т.е передаточная функция это просто импеданс конденсатора обратной связи. И вклад токовых шумов в выходное напряжение шума есть произведение этого импеданса на величину токовых шумов (и на корень из полосы частот). Никакой емкости датчика тут нет.
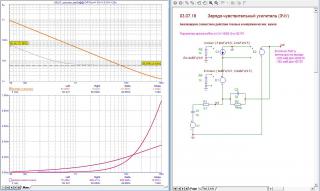
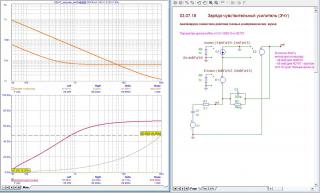
И второе, дело не в отношении тока датчика и тока (шумового) ОУ, с этим никто не спорит (конечно ток датчика должен быть заведомо больше шумового тока ОУ)...Я о том, что превуалируют шумы напряжения ОУ, поскольку они дополнительно усиливаются и интегрируются в более широкой полосе частот. Я раньше тоже симулировал по моделям ОУ и получалось совсем не то, что в жизни. Теперь я просто взял и вставил в схему эквивалентные источники шума напряжения и тока для этих ОУ и получилось, что AD797 лучше (шумы 350мкВ в полосе 50кГц на выходе), чем AD8610 (шумы 930 мкВ)
Верхние графики это спектральное распределение шумов приведенное ко входу для обоих ОУ, нижние - интегральное значение шума на выходе. Обратите внимание на выделенный график вверху (более низкие шумы на низких частотах) -это AD8610 (на высоких частотах приближается к 6 нВ/Гц), ему соответствует нижний график с более высокими интегральными значениями. 2 damasking
Update!! Исправил цифры в симуляции.
Для указанной цепочки ОС (220пФ||1МОм) у меня по симуляции получается 48мкВ шумов на выходе в полосе 60кГц для AD8610 и 67мкВ для AD797. Если 48 разделить на усиление (31) и на корень(60000), то получим 6,3 нВ/sqr(Гц), что близко к спектральной плотности шумов напряжения AD8610, т.к токовые шумы у него мизерные. А вот AD797 c такой большой емкостью в ОС даёт хуже результат.
Хотел сравнить с Вашими цифрами и запнулся: Цитата Что получается на практике, на АЦП у меня приходит где то 100 семплов, это около 0,004577 В Это как понимать - "скв" или размах?? Короче, попробуйте AD797 Не знаю что посоветовать, нужно моделировать разные варианты...AD797 хорошо смотрится если уменьшить емкость ОС, еще можно посмотреть AD8597. #s3gt_translate_tooltip_mini { display: none !important; }
|
|
|
|
|
|
|
|
Jul 4 2018, 00:14
|
Знающий
Группа: Свой
Сообщений: 888
Регистрация: 25-09-08
Из: Питер
Пользователь №: 40 458
|
Даже смешно, говорим одно и то же, но никак договориться не можем.
На вашем первом графике приведен не входной, а выходной шум. Входной шум получается делением на коэффициент усиления, который для ЗЧУ в рабочей полосе частот равен Сдатчика/Сос. При этом из формулы исчезает Сос и остается только емкость датчика.
Я говорил, про спектральную плотность входного шума, вы - про интегральный шум. Ессно, получаются совершенно разные вещи.
Если вы работаете в низкочастотном диапазоне - предпочтительны ОУ с малым токовым шумом, поскольку импеданс емкостного датчика велик и основной вклад дает токовый шум. Поставьте верхнюю граничную частоту 10 кГц - и AD8610 будет лучше AD797.
Если работать нужно в высокочастотном диапазоне - то предпочтительны ОУ с малым напряженческим шумом, поскольку импеданс датчика мал и основной вклад дает напряженческий шум.
Кстати, приятно что спектральные плотности шума рассчитанные разными способами практически совпадают.
|
|
|
|
|
|
|
|
Jul 4 2018, 03:32
|
Группа: Участник
Сообщений: 12
Регистрация: 23-06-18
Пользователь №: 105 415
|
Цитата(Alexashka @ Jul 3 2018, 19:55) Хотел сравнить с Вашими цифрами и запнулся:
Это как понимать - "скв" или размах??
Короче, попробуйте AD797 Не знаю что посоветовать, нужно моделировать разные варианты...AD797 хорошо смотрится если уменьшить емкость ОС, еще можно посмотреть AD8597. #s3gt_translate_tooltip_mini { display: none !important; } Да на выходе я смотрел размах, ну и спектральную картину(Фурье) Кстати у меня на плате стоял кварц 32кГц и он шумел) поменял на chip кварц шум стал меньше, далее отпаял от платы посадил на провода и наклеил его на мягкую наклейку) шум ушел) интересно конечно то что датчик ловит этот шум) СПАСИБО что представили свои расчеты Rudy_b и Alexashka, после ваших расчетов картина начала проясняться, то что для моего диапазона частот необходимо одновременно низкий шум напряжения для высоких частот и низкий токовый шум для низких частот. Думаю MAX4477 с его 4нВ и 0,5 фА будет неплохим вариантом, ну а так же конечно хотел бы попробовать всему рекомендованный ad745 с его 2,9нВ и 6,9 фА. Если конечно не хватит этого уровня шумов то придется думаю, как вы говорили ставить ПТ с низким шумом напряжения а далее ОУ. Ну а прямо сейчас занимаемся изменение конструкции датчика, потому что увеличение его чувствительности хотя бы в 2 раза даст выигрыш в 6 Дб. Так же необходимо снятие импеданса датчика, все таки думаю у него более сложная модель чем просто рассматривать как конденсатор.
Сообщение отредактировал damasking - Jul 4 2018, 03:35
|
|
|
|
|
|
|
|
Jul 4 2018, 12:56
|
Практикующий маг
Группа: Свой
Сообщений: 3 634
Регистрация: 28-04-05
Из: Дубна, Моск.обл
Пользователь №: 4 576
|
Цитата(rudy_b @ Jul 4 2018, 03:14) На вашем первом графике приведен не входной, а выходной шум. Входной шум получается делением на коэффициент усиления, который для ЗЧУ в рабочей полосе частот равен Сдатчика/Сос. При этом из формулы исчезает Сос и остается только емкость датчика. Вот Вы о чем. Действительно, если смотреть приведенный ко входу результат, то проще рассматривать импеданс самого датчика без привязки к цепям ОС. Вроде всё логично, с другой стороны датчик ведь является источником заряда, а не напряжения. И если перевести шум напряжения в зарядовый шум, то получим (просто умножаем напряжение шума на емкость датчика): Qш = Uш*Сд, а т.к. приведенный ко входу Uш = Zд*iш = iш / 2 πfCд, то Qш = iш / 2 πf - теперь уже емкость датчика сократилась, т.е эквивалентный шумовой заряд не зависит от емкости датчика. Цитата(damasking @ Jul 4 2018, 06:32) Если конечно не хватит этого уровня шумов то придется думаю, как вы говорили ставить ПТ с низким шумом напряжения а далее ОУ. Я бы сразу перешел на схему c полевиком на входе, единственное не забудьте сделать защиту затвора, т.к керамика при ударах способна генерировать неслабые киловольты. Цитата(damasking @ Jul 4 2018, 06:32) Думаю MAX4477 с его 4нВ и 0,5 фА будет неплохим вариантом, ну а так же конечно хотел бы попробовать всему рекомендованный ad745 с его 2,9нВ и 6,9 фА. Есть почти аналог макса AD8655, правда у него токовые шумы не дают, но они по определению низки, т.к это CMOS. У AD745 шумы 2,9нВ на 10кГц, у Ad8655 даже пониже - 2,7нВ.
|
|
|
|
|
|
|
|
Jul 4 2018, 20:21
|
Знающий
Группа: Свой
Сообщений: 888
Регистрация: 25-09-08
Из: Питер
Пользователь №: 40 458
|
Цитата(Alexashka @ Jul 4 2018, 15:56) ...
Вроде всё логично, с другой стороны датчик ведь является источником заряда, а не напряжения. И если перевести шум напряжения в зарядовый шум, то получим (просто умножаем напряжение шума на емкость датчика):
Qш = Uш*Сд, а т.к. приведенный ко входу Uш = Zд*iш = iш / 2πfCд, то
Qш = iш / 2πf - теперь уже емкость датчика сократилась, т.е эквивалентный шумовой заряд не зависит от емкости датчика.
... Тут есть масса тонкостей, но, в целом, это именно так - сравнивается заряд сигнала и шумовой заряд. Но заряд сигнала, если величина перемещения фиксирована (амплитуда механических колебаний не зависит от частоты), определяется емкостью датчика (в т.ч.). Если я запараллелю два датчика - заряд сигнала удвоится, емкость тоже, а шумовой заряд не изменится, т.е. отношение сигнал/шум возрастет. А вот если фиксирована колебательная скорость, то все несколько иначе - перемещение начинает зависеть от частоты - при увеличении частоты перемещение (амплитуда механических колебаний) уменьшается, соответственно уменьшается и заряд сигнала. И вот тут, соответственно, сильно меняется спектральная зависимость сигнал/шум. В реале всегда нечто среднее. + резонансные частоты (многочисленные) + демпфирование (якобы эффективное) - получается каша, которую рассчитать практически невозможно, проще измерить.
|
|
|
|
|
|
|
|
Jul 5 2018, 04:16
|
Группа: Участник
Сообщений: 12
Регистрация: 23-06-18
Пользователь №: 105 415
|
Цитата(Alexashka @ Jul 4 2018, 12:56) Я бы сразу перешел на схему c полевиком на входе, единственное не забудьте сделать защиту затвора, т.к керамика при ударах способна генерировать неслабые киловольты. Да, надо будет подумать, так как прибор работает в агрессивных условиях и ударяться будет думаю часто) Цитата(Alexashka @ Jul 4 2018, 12:56) Есть почти аналог макса AD8655, правда у него токовые шумы не дают, но они по определению низки, т.к это CMOS. У AD745 шумы 2,9нВ на 10кГц, у Ad8655 даже пониже - 2,7нВ. Да посмотрел на него) думаю он даже будет получше чем ad745 и max 4477 да и дешевле намного на том же chipdip, главное не нарваться на подделку Цитата(rudy_b @ Jul 4 2018, 20:21) Тут есть масса тонкостей, но, в целом, это именно так - сравнивается заряд сигнала и шумовой заряд.
Но заряд сигнала, если величина перемещения фиксирована (амплитуда механических колебаний не зависит от частоты), определяется емкостью датчика (в т.ч.). Если я запараллелю два датчика - заряд сигнала удвоится, емкость тоже, а шумовой заряд не изменится, т.е. отношение сигнал/шум возрастет.
А вот если фиксирована колебательная скорость, то все несколько иначе - перемещение начинает зависеть от частоты - при увеличении частоты перемещение (амплитуда механических колебаний) уменьшается, соответственно уменьшается и заряд сигнала. И вот тут, соответственно, сильно меняется спектральная зависимость сигнал/шум.
В реале всегда нечто среднее. + резонансные частоты (многочисленные) + демпфирование (якобы эффективное) - получается каша, которую рассчитать практически невозможно, проще измерить. Если я добавлю параллельно еще один датчик в моем случае увеличится ли сигнал/шум? Обязательно попробую после создания эталонного источника. Цитата(rudy_b @ Jul 4 2018, 11:44) Учтите, что в наших расчетах не учтен фликкер шум. Его параметры для оперов практически не оговорены, можно только ориентироваться по интегральному шуму в полосе 0.1-10 Гц который обычно приводится.
В стандартных датчиках входной полевик встраивается сразу в корпус датчика и в кабель выведен его сток. Для удаления низкочастотных шумов лучше добавить ФВЧ? помимо того что образуется в цепи обратной связи? Читал где то что в предусилителях от Bruel стоит дополнительный ФВЧ
|
|
|
|
|
|
|
|
Jul 5 2018, 09:42
|
Практикующий маг
Группа: Свой
Сообщений: 3 634
Регистрация: 28-04-05
Из: Дубна, Моск.обл
Пользователь №: 4 576
|
Цитата(rudy_b @ Jul 4 2018, 23:21) Если я запараллелю два датчика - заряд сигнала удвоится, емкость тоже, а шумовой заряд не изменится, т.е. отношение сигнал/шум возрастет. В целом согласен, работа датчика как антенны - собирать энергию из пространства, поэтому чем больше размер, тем больше сигнал, ну и ёмкость тоже больше. Тут правда надо учитывать длину волны, например на 30кГц в воде длина волны всего 5см, так что если фронт падает под углом и между датчиками 2-3см, то они могут оказаться работающими в противофазе. ЗЫ. Я тут придумал критерий как определить доминирующий фактор шума -ток или напряжение. Если увеличить емкость ОС скажем в 10 раз, то в случае доминирования шумов напряжения выходной шум уменьшиться также в 10 раз (шумы падают во столько раз во сколько падает усиление). А если доминируют токовые шумы, то шум упадет в 3.2 раза (как корень из 10, т.к в 10 раз сузится полоса пропускания токовых шумов). Соответственно меняем емкость и смотрим во сколько раз снизится шум - если ближе к 10ке, то нужно принимать меры по снижению шума напряжения, если ближе к 3-ке, то значит токовые шумы - основная проблема нашего усилителя.
|
|
|
|
|
|
|
|
Jul 5 2018, 23:11
|
Практикующий маг
Группа: Свой
Сообщений: 3 634
Регистрация: 28-04-05
Из: Дубна, Моск.обл
Пользователь №: 4 576
|
Цитата(rudy_b @ Jul 5 2018, 22:39) Что-то странное вы сказали, от емкости ОС входной шум практически не зависит Зачем входной? ВЫходной смотрим, вольтметром  Цитата(Herz @ Jul 5 2018, 23:19) Респект! А откуда ёмкость в ОС знает характер источника шума? Объяснил же вроде  Емкость ОС изменяет частоту среза токовых шумов, если токовые шумы дают основной вклад в шумы на выходе усилителя, то изменение емкости (и соответственно изменение шумовой полосы) в 10 раз приведет к изменению интегрального шума в sqr(10) раз. Если же основной вклад от шумов напряжения, то они возрастут в 10 раз, если емкость ОС уменьшить в 10 раз (т.к в 10 раз возрастет усиление по напряжению). Если вклад равный от токовых и напряженческих шумов, то изменение будет гдето посредине между 3 и 10 Можете проверить в симуляторе.
|
|
|
|
|
|
|
|
Jul 18 2018, 15:50
|
Группа: Участник
Сообщений: 12
Регистрация: 23-06-18
Пользователь №: 105 415
|
Цитата(VNS @ Jun 27 2018, 15:27) Рекомендую поставить согласованную пару транзисторов типа 159НТ - есть современный аналог - и ещё один кристалл датчика, работающий вхолостую. Пара транзисторов включается по схеме дифференциального УПТ. а для чего нужен еще один кристалл работающий вхолостую?
|
|
|
|
|
|
|
|
Jul 19 2018, 01:39
|
Местный
Группа: Участник
Сообщений: 256
Регистрация: 15-04-13
Из: Казахстан, г. Алматы
Пользователь №: 76 504
|
Цитата(damasking @ Jul 18 2018, 18:50) а для чего нужен еще один кристалл работающий вхолостую? Используется дифференциальная схема. На одном из кристаллов имеется полезный сигнал, а на другом отсутствует...
Сообщение отредактировал VNS - Jul 19 2018, 07:19
|
|
|
|
|
|
|
 |
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|