| |
|
  |
 Алгоритм позиционирования Алгоритм позиционирования, при использовании энкодера 45 имп/об |
|
|
|
|
 Dec 3 2008, 05:45 Dec 3 2008, 05:45
|
Бывалый

Группа: Свой
Сообщений: 1 584
Регистрация: 7-08-07
Пользователь №: 29 615

|
Цитата(haker_fox @ Dec 3 2008, 04:58)  Данных для расчета практически нет. Ну двигатель известен. А звенья манипулятора уже готовые. На них нет ни чертежей, ни какой другой документации. А без этих данных не приведенный момент инерции посчитать, ничего не сделать... Брать штангель, весы и вручную мерить?  Для определения электромагнитной постоянной (L/R) (лучший метод экспериментальный)- двигатель зажимают (чтобы не ерзал). Подают ступеньки и по осцилоскопу смотрят переходный процесс. Время до 0.65 от установившегося значения тока и есть постоянная времени. Электромеханическую постоянную можно посчитать, но это не очень актуально, т.к. настройка привода будет компромисной с учетом механики (люфты, ограниченная жесткость). Дело в том, что механика - это не просто интегратор от скорости в положение, а гораздо круче, чем даже модель двигателя. 
|
|
|
|
|
|
|
|
Dec 3 2008, 06:05
|

Местный
Группа: Свой
Сообщений: 473
Регистрация: 10-09-06
Из: Тольятти. Самарская обл.
Пользователь №: 20 249
|
Цитата(alexander55 @ Dec 3 2008, 09:45) Для определения электромагнитной постоянной (L/R) (лучший метод экспериментальный)- двигатель зажимают (чтобы не ерзал). Подают ступеньки и по осцилоскопу смотрят переходный процесс. Время до 0.65 от установившегося значения тока и есть постоянная времени. Ну если использовать замкнутый контур тока, с достаточно большим коэффициентом усиления, задумоваться о электромагнитной постоянной практически не придется. Цитата(alexander55 @ Dec 3 2008, 09:45) Электромеханическую постоянную можно посчитать, но это не очень актуально, т.к. настройка привода будет компромисной с учетом механики (люфты, ограниченная жесткость). Дело в том, что механика - это не просто интегратор от скорости в положение, а гораздо круче, чем даже модель двигателя. Механика, это в первом приближении, тупо J(dw/dt), для многих случаев. Для других случаев это две массы с упругой связью. Далее добавляем гистерезис... Для очень точных систем нелинейное трение... А если сложнее, то проще механику поменять, чтобы описывалать первым или вторым случаем. Тут пока нужно рассматривать первый случай.
--------------------
Если все, то не я...
|
|
|
|
|
|
|
|
Dec 3 2008, 06:33
|
Бывалый
Группа: Свой
Сообщений: 1 584
Регистрация: 7-08-07
Пользователь №: 29 615
|
Цитата(PhX @ Dec 3 2008, 09:05) Ну если использовать замкнутый контур тока, с достаточно большим коэффициентом усиления, задумоваться о электромагнитной постоянной практически не придется. Это так, но с устойчивостью контура тока могут быть проблемы (например, из-за нелинейностей в режиме прерывистых токов меняется передаточная функция с апериодической на пропорциональное звено). Не забываем про противоэдс, если ее не компенсируем. Цитата(PhX @ Dec 3 2008, 09:05) Механика, это в первом приближении, тупо J(dw/dt), для многих случаев. Так. Цитата(PhX @ Dec 3 2008, 09:05) Для других случаев это две массы с упругой связью. Могут быть и 3-х массовые и т.д. Цитата(PhX @ Dec 3 2008, 09:05) Для других случаев это две массы с упругой связью.
Далее добавляем гистерезис...
Для очень точных систем нелинейное трение...
А если сложнее, то проще механику поменять, чтобы описывалать первым или вторым случаем.
Тут пока нужно рассматривать первый случай. Если интересно, могу накидать структуру.
|
|
|
|
|
|
|
|
Dec 5 2008, 07:38
|

Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
Как и обещал, формулирую требования к приводу: хотелось бы, чтобы привода работал в двух независимых друг от друга режимах, конечно только в одном из них в один момент времени. Режимы:
1. Только стабилизация угловой скорости, без привязки к координатам, например для стабилизации вращения шпиндельной головки. Там не нужно знать, сколько прошли, нужно поддерживать определенную угловую скорость. В этом режим должно задаваться желаемое ускорение (профиль трапезоидальный, как один из простых), и стабилизируемая скорость (ну это само собой).
2. Режим позиционирования. При вращении вала двигателя для достижения заданной координаты используется также режим 1 внутри этого (2) режима. Т.е. при перемещении в точку разгоняемся с заданным ускорением, достигаем какой-то заданной скорости, плавно тормозим и приходим в желаемую точку. Далее в этой точки стоим и не даем себя сдвинуть, те сопротивляемся возмущениям.
Ну вот примерно и все...
--------------------
Выбор.
|
|
|
|
|
|
|
|
Dec 5 2008, 08:27
|

чукчхэшаражогрмонтажник
Группа: Участник
Сообщений: 1 852
Регистрация: 13-07-07
Из: Minsk
Пользователь №: 29 094
|
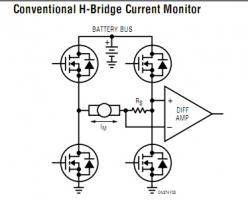
Цитата(haker_fox @ Dec 5 2008, 11:08) Могу ли я применить для контроля тока (момента) схему дифференциального усилителя? Вот примерно, как на рисунке. Выход усилителя буду заводить на АЦП ATmega168. У Linear Technology есть более интересная схема, даёт больше функциональных возможностей. Ваша схема не позволит диагностировать состояние плеч моста.
--------------------
Quo vadis?
|
|
|
|
|
|
|
|
Dec 5 2008, 08:29
|

Знающий
Группа: Свой
Сообщений: 540
Регистрация: 19-04-08
Из: Москва
Пользователь №: 36 913
|
Цитата(haker_fox @ Dec 5 2008, 10:08) Могу ли я применить для контроля тока (момента) схему дифференциального усилителя? Вот примерно, как на рисунке. Выход усилителя буду заводить на АЦП ATmega168. Можно использовать готовые микросхемы усилители тока , например Analog Devices Если делать на "россыпи" ,то будет примерно так http://www.awenwen.com/gb/doc/DMC550.pdf
|
|
|
|
|
|
|
|
Dec 5 2008, 09:00
|
Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
Цитата(evgeny_ch @ Dec 5 2008, 16:27) У Linear Technology есть более интересная схема, даёт больше функциональных возможностей. Ваша схема не позволит диагностировать состояние плеч моста. У меня монолитная L298. Не получится вклиниться в плечи мостов. Цитата(alexander55 @ Dec 5 2008, 15:33) Можно. Подумайте насчет гальванических развязок (может они не нужны, а может нужны). Я думаю, что желательны.
--------------------
Выбор.
|
|
|
|
|
|
|
|
Dec 5 2008, 09:49
|
чукчхэшаражогрмонтажник
Группа: Участник
Сообщений: 1 852
Регистрация: 13-07-07
Из: Minsk
Пользователь №: 29 094
|
Цитата(_Pasha @ Dec 5 2008, 12:32) А какие преимущества у дифусилителя перед схемой измерения тока истока нижних транзисторов? упс, evgeny_ch опередил. PS: или перед ir2172Больше не буду. Токовые мониторы от TI. Products Tagged with current sensing. Должна быть возможность мерять ток, протекающий в источник, при работе двигателя в генераторном режиме . Что не исключает измерения тока в цепи "земли".
Сообщение отредактировал evgeny_ch - Dec 5 2008, 09:54
--------------------
Quo vadis?
|
|
|
|
|
|
|
|
Dec 5 2008, 10:35
|
Профессионал
Группа: Свой
Сообщений: 1 613
Регистрация: 2-09-08
Из: г.Набережные Челны
Пользователь №: 39 936
|
Цитата(haker_fox @ Dec 5 2008, 10:08) Могу ли я применить для контроля тока (момента) схему дифференциального усилителя? Вот примерно, как на рисунке. Выход усилителя буду заводить на АЦП ATmega168. Мне кажется лучше ток "снимать" с шунта включенный по питанию, обычно в GND, во первых ты сразу контролируешь сквозной ток во вторых полярность выходного тока у тебя постоянный, независимо от вращения.
|
|
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|