| |
|
  |
 Помогите разобратся в адовой схеме Помогите разобратся в адовой схеме |
|
|
|
|
 May 7 2014, 15:52 May 7 2014, 15:52
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608

|
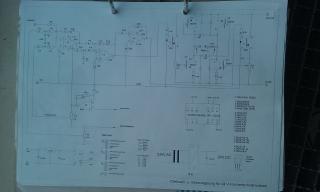
Собственно говоря, я учусь в институте Георга-Симона-Ома, это в городе Нюрнберг (Германия), на данный момент я заканчиваю 6ой семестр факультета электро- и информационной техники, в данном семестре мы выполняем проектную работу, который выдаёт нам преподаватель нашего выбора. Мне и моему сокурснику собственно достался этот ад. Что это такое? Это схема управления мотора постоянного тока, задача такова: постоянно выбивает 2 транзистора (нижних), нам нужно найти причину и внести свои поправки дабы этого не происходило. Мы в данный момент находимся на следующем этапе: Понять схему... В связи с этим мы запаслись литературой и спаяли сие чудо аналогового мышления. Теперь делая замеры, пытаемся понять как происходит управление... В данный момент столкнулись с некими проблемами, а именно: - мы не совсем понимаем как происходит регулировка всего если честно, тоесть сами операционые усилители как я понял это 2 PI, 1 Inverter, 1 управление силой тока, но вот именно как они взаимодействуют не совсем понятно, помогите кто, если не сложно  - Если меряем оптрон к массе управления, получаем пульсовый сигнал, когда меряем оптрон к массе транзисторного "круга" получаем мертвеченко П.с: Пардоньте за мой русский П.с.с: как работает транзисторный мост вроде ясно, проблема в понимание скорее в левой стороне :/
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
May 7 2014, 20:20
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Ребят, спасибо за ответы, насчёт токоограничительных резисторов я уже думал...
Но вопрос не в этом на данной стадии, не до конца получается понять левую часть схемы, тоесть как именно происходит сама регулировка >.<
|
|
|
|
|
|
|
|
May 7 2014, 20:59
|
Частый гость

Группа: Участник
Сообщений: 111
Регистрация: 24-04-14
Пользователь №: 81 504
|
Цитата(RulerOfCats @ May 8 2014, 00:20)  Ребят, спасибо за ответы, насчёт токоограничительных резисторов я уже думал...
Но вопрос не в этом на данной стадии, не до конца получается понять левую часть схемы, тоесть как именно происходит сама регулировка >.< А промоделировать поведение схемы не пробовали? Если да, то в какой программе и что именно вызывает вопросы.
Сообщение отредактировал silantis - May 7 2014, 21:00
|
|
|
|
|
|
|
|
May 7 2014, 21:25
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Ещё не пробовали, собираемся в PSpice, но прежде чем что-либо моделировать было бы не плохо хотя-бы как-то поверхностно понять схему. Я вот лично вижу в этой схеме два PI регулятора и 2 инвертора, конденсаторы допустим в левом верхнем углу вообще для меня являются загадкойб вот собственно :/
|
|
|
|
|
|
|
|
May 8 2014, 00:56
|
Местный
Группа: Свой
Сообщений: 443
Регистрация: 11-02-09
Пользователь №: 44 698
|
Цитата(RulerOfCats @ May 8 2014, 00:25) Ещё не пробовали, собираемся в PSpice, но прежде чем что-либо моделировать было бы не плохо хотя-бы как-то поверхностно понять схему. Я вот лично вижу в этой схеме два PI регулятора и 2 инвертора, конденсаторы допустим в левом верхнем углу вообще для меня являются загадкойб вот собственно :/ Это связано с формированием заданной передаточной функции управления двигателем, чтобы получить заданное качество управления. Переходную характеристику На вход поступает первая и вторая производная чего-то. Как переводятся с немецкогог слова?
|
|
|
|
|
|
|
|
May 8 2014, 05:38
|

Местный
Группа: Свой
Сообщений: 457
Регистрация: 7-06-07
Из: Минск
Пользователь №: 28 262
|
Цитата(RulerOfCats @ May 8 2014, 00:25) ... но прежде чем что-либо моделировать было бы не плохо хотя-бы как-то поверхностно понять схему... Если такую работу вам дали, значит на лекциях должны были читать теорию про это.
--------------------
Человек учится говорить два года, а молчать - всю жизнь
|
|
|
|
|
|
|
|
May 8 2014, 06:40
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Jurenja @ May 7 2014, 22:19) Двухсторонний стабилитрон ставить необязательно - есть 4 диода, защищающие коллекторы транзисторов, их достаточно имхо.
А вылетают транзисторы из-за слишком большого базового тока - базовый переход не выдерживает. Оптроны могут выдавать большие токи. Взгляните в спецификацию. Оптроны слабее. Они должны были бы гореть первые при большом базовом токе у транзисторов. Во вторых при подключенном моторе базовые токи не могут быть большими у транзисторов T2 и T4, этому помешает ток нагрузки через R20 и R21 Без мотора должны были бы гореть оптроны. Транзсторы могут выходить из строя просто из-за перегрева. Ну а принцип работы схемы до конца нельзя восстановить поскольку не изображены цепи откуда приходят сигналы задатчиков тока и частоты. Не видно обратных связей. На U1 сделаны интеграторы. Пропорционального канала не видно. Вот видимо его и надо добавить. Скорее всего надо закоротить конденсатор 4
|
|
|
|
|
|
|
|
May 8 2014, 08:44
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 1-10-08
Из: Екатеринбург
Пользователь №: 40 610
|
Цитата(AlexandrY @ May 8 2014, 12:17) Резистор просто на верхних частотах искажает характеристику интегратора. Странное вообще включение. такое включение (последовательно резистор с конденсатором в ОС) и есть ПИ регулятор
|
|
|
|
|
|
|
|
May 8 2014, 10:11
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(AlexandrY @ May 8 2014, 13:39) Согласен, логика подвела.  Тогда что это такое? Такой хитрый ШИМ? Что по вашему идет с сигнала Sollwert? Там ведь нигде не может быть постоянной составляющей. Трудно сказать, что там и зачем. По логике... там есть быстрый ПИД - он скорее всего должен регулировать ток (механический момент). А управляется он более медленным регулятором. Скорости? Так мне моя логика подсказывает. А вот где там датчик тока и скорости? Возможно это напряжение на моторе за вычетом тока с некоторым коэффициентом для вычитания падения напряжения на обмотке ротора.
|
|
|
|
|
|
|
|
May 8 2014, 10:57
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 1-10-08
Из: Екатеринбург
Пользователь №: 40 610
|
Цитата Там , если приглядеться спасибо, нашёл, честно говоря, рассматривать номиналы и надписи на картинке такого качества - глаза болят более строго: обозначения U и I не равны словам на D и S возле стрелочек влево
Сообщение отредактировал _Vova - May 8 2014, 10:57
|
|
|
|
|
|
|
|
May 8 2014, 15:45
|
Профессионал
Группа: Свой
Сообщений: 1 719
Регистрация: 13-09-05
Из: Novosibirsk
Пользователь №: 8 528
|
Вообще-то на рисунке типичная конструкция из "доцифровой" эры.
Задачей регулятора является поддержание заданной скорости (Sollwert). В качестве сигналов обратной связи используются ток мотора (Stromistwert) и напряжение с тахогенератора (Drehzahlistwert, пропорциональное скорости).
Схема на первом ОУ - это ПИ-регулятор, его выход в первом приближении пропорционален желаемому ускорению объекта управления (или силе/крутящему моменту или просто току двигателя, поскольку они все пропорциональны друг другу).
Второй ОУ - тоже ПИ-регулятор, его задача - стабилизация заданного тока, он заметно быстрее первого (постоянная времени меньше).
Параметры первого регулятора определяются в основном механикой объекта (момент инерции, трение), а второго более электрическими характеристиками двигателя.
Ну и ещё сигнал тока двигателя подаётся на вход первого регулятора чтобы компенсировать активное сопротивление ротора движка.
Если к выходу второго ОУ подключить усилитель мощности, то этим аналоговым сигналом вполне можно управлять маломощным двигателем.
А вот всё, что дальше вызывает массу вопросов. По-хорошему там нужен правильный ШИМ-модулятор для управления уже мощными ключами.
Вместо него там какая-то пародия, анализ работы которой не так прост. Во всяком случае подавать (медленно меняющееся) напряжение с выхода второго ОУ на оптрон - плохая идея.
--------------------
Russia est omnis divisa in partes octo.
|
|
|
|
|
|
|
|
May 8 2014, 16:32
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 1-10-08
Из: Екатеринбург
Пользователь №: 40 610
|
Цитата Вместо него там какая-то пародия похоже что автор схемы и не думал о ШИМ, резисторы в цепи диодов оптронов высокоомные, оптроны не находятся в области насышения, правая часть - это "типа" такой линейный аналоговый усилитель
|
|
|
|
|
|
|
|
May 8 2014, 17:43
|
Местный
Группа: Свой
Сообщений: 443
Регистрация: 11-02-09
Пользователь №: 44 698
|
Цитата(domowoj @ May 8 2014, 19:37) эт точно, схема дрянь. По-моему с цифровым управлением еще тяжелей. Там будем проблема устойчивости на зеркальных частотах
|
|
|
|
|
|
|
|
May 8 2014, 18:29
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(_Vova @ May 8 2014, 19:32) похоже что автор схемы и не думал о ШИМ, резисторы в цепи диодов оптронов высокоомные, оптроны не находятся в области насышения, правая часть - это "типа" такой линейный аналоговый усилитель Если предположить, что на вход Sollwert подают ШИМ, то эта схема вполне пропустит ШИМ. О ШИМ-е косвенно говорят фильтры на всех входах PI регуляторов кроме Sollwert. И оптроны будут работать на 1..1.3 мА, что достаточно для их насыщения. При этом и ток в базах транзисторов ограничивать будут. Вот тут уже надо моделировать чтобы определить какой частоты должен быть ШИМ. Тогда и причина сгорания транзисторов понятна. Если подавать не ШИМ, то все равно будет стабилизация вращения двигателя, но транзисторы будут работать в линейном режиме и страшно перегреваться.
|
|
|
|
|
|
|
|
May 8 2014, 18:59
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Спасибо за ответы, очень сильно помогли, простите что не успел перевести обозначения, весь день в институте был, была консультация с преподом по поводу схемы, сами поболее уже разобрались, да и ваши ответы очень помогли, Сегодня переносили в PSpice, в понедельник доделаем будем смотреть сигналы. Стыдно даже как-то что не подумал о том чтобы схему поконтрастнее сделать и перевести обозначения с немецкого. Ещё раз всем огромное спасибо!!!! Цитата(AlexandrY @ May 8 2014, 10:39) Согласен, логика подвела. Тогда что это такое? Такой хитрый ШИМ? Что по вашему идет с сигнала Sollwert? Там ведь нигде не может быть постоянной составляющей. Sollwert=то к чему должен стремится сигнал, задающее устройство по-русски вроде, в данной схеме его значение это постоянное напряжение Цитата(Tanya @ May 8 2014, 11:11) Трудно сказать, что там и зачем. По логике... там есть быстрый ПИД - он скорее всего должен регулировать ток (механический момент). А управляется он более медленным регулятором. Скорости? Так мне моя логика подсказывает.
А вот где там датчик тока и скорости? Возможно это напряжение на моторе за вычетом тока с некоторым коэффициентом для вычитания падения напряжения на обмотке ротора. Ток снимается с мотора, Stromistwert (Ток который на моторе, с мотора стрелочка с I идёт на контакт: Stromistwert) Датчик скорости, это напряжение на моторе Drehzahlistwert (стрелочка от мотора где U) I-Kompensation (возле потенциометра P2) это как раз таки связано с падением на обмотке ротора
|
|
|
|
|
|
|
|
May 8 2014, 19:17
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Цитата(AlexandrY @ May 8 2014, 20:05) Так что, ШИМ-а таки нет?  Нет, я хотел её предложить, но препод сказал что от этого EMI и будет глючить SPS, так там таких плат штук 30, для 30 моторов которые управляют миниатюрной фабрикой, так что только аналог, только хардкор Цитата(sifadin @ May 8 2014, 18:43) По-моему с цифровым управлением еще тяжелей.
Там будем проблема устойчивости на зеркальных частотах Цифровое управление можно было бы спрогить  А тут осцилограф и конспекты из рук не выпускаем :/
|
|
|
|
|
|
|
|
May 8 2014, 19:38
|
Гуру
Группа: Участник
Сообщений: 6 776
Регистрация: 5-03-09
Из: Москва
Пользователь №: 45 710
|
Цитата(AlexandrY @ May 8 2014, 22:05) Так что, ШИМ-а таки нет? Да, есть только обыкновенный линейный мостовой усилитель. Если это раскраска "найдите семь отличий", то, например: 1) УГО транзисторов не соответствуют факту — они составные; 2) минимальный паспортный коэффициент передачи по току данных оптронов 50%, их максимальный возможный входной ток на схеме задан резисторами 8,2 кОм, т.е. 1 мА, который даст на их нагрузке, т.е. потенциометрах 1 кОм, соответственно максимум 0,5 В, тогда как для открытия транзисторов усилителя необходимо в 5 раз больше; 3) светодиоды оптронов не защищены от того, что на них подаётся в 4 раза превышающее паспортный предел отрицательное напряжение; 4) пока на схеме два общих провода, она нерабочая.
|
|
|
|
|
|
|
|
May 13 2014, 11:18
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Снова всем привет, черчу это чудо в LTSpice, этих усилителей/оптронов/транзисторов нету в базе данных, взял LT1001 как усилки (должно вроде прокатить), а вот оптроны PC817A (сомнения) и транзисторы стандартные пнп и нпн (точно бред, так как по схеме это дарлингтоны, тоесть там внутри 2 транзистора, 2 резистора и диод), хелпки, готовый шематикс потом тоже залью
|
|
|
|
|
|
|
|
May 13 2014, 11:42
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(RulerOfCats @ May 13 2014, 14:18) Снова всем привет, черчу это чудо в LTSpice, этих усилителей/оптронов/транзисторов нету в базе данных, взял LT1001 как усилки (должно вроде прокатить), а вот оптроны PC817A (сомнения) и транзисторы стандартные пнп и нпн (точно бред, так как по схеме это дарлингтоны, тоесть там внутри 2 транзистора, 2 резистора и диод), хелпки, готовый шематикс потом тоже залью А толку все это чертить в LTSpice если нет модели самого мотора? Или собираетесь купить ? Динамику системы без мотора не увидеть. Легче тогда уж в MATLAB-е рисовать, там хоть модели моторов доступны.
|
|
|
|
|
|
|
|
May 13 2014, 11:49
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Цитата(AlexandrY @ May 13 2014, 12:42) А толку все это чертить в LTSpice если нет модели самого мотора? Или собираетесь купить ? Динамику системы без мотора не увидеть. Легче тогда уж в MATLAB-е рисовать, там хоть модели моторов доступны. Ну, мотор в спайсе должен быть у препода вроде, мы пока катушку с резистором туда нарисовали XD
|
|
|
|
|
|
|
|
May 13 2014, 13:59
|
Профессионал
Группа: Свой
Сообщений: 1 719
Регистрация: 13-09-05
Из: Novosibirsk
Пользователь №: 8 528
|
Цитата(Tanya @ May 13 2014, 18:49) Мотор... - это же конденсатор с резисторами и, для совсем уж пытливых, - катушечка. А ещё генератор э.д.с, пропорциональной скорости. В библиотеке Оркада есть простенькая модель двигателя с вязким трением и моментом инерции на валу. Находится в файле function.lib (а в function.olb символ для неё). CODE * MODEL_TYPE=135
* SYMBOL_NAME=DCMOTOR
* TERM( A )=4
* TERM( B )=7
* TERM( С )=3
.SUBCKT AWBDCMOTOR 4 7 3 PARAMS: R=0 L=1M BACK_EMF=1 K_TORQ=1 K_VISC=0 INERTIA=1M CONST_FRIC=0
.PARAM LA = {L}
.PARAM RL = {R*1E6+1E3}
.PARAM KE = {BACK_EMF}
.PARAM KT = {K_TORQ/RA}
.PARAM JM = {INERTIA}
.PARAM RF = {1/(K_VISC+1E-12)}
.PARAM TF = {CONST_FRIC}
.PARAM RA = {R+1E-6}
EDUMMY1 AWBDCMOTOR_DUMMY1 0 VALUE ={1} ERROR={ERROR(INERTIA == 0,"ROTOR INERTIA MUST BE NONZERO")}
EDUMMY2 AWBDCMOTOR_DUMMY2 0 VALUE ={1} ERROR={ERROR(L == 0,"ARMATURE INDUCTANCE MUST BE NONZERO")}
II2 3 0 {TF}
RR3 0 3 {RF}
CC1 3 0 {JM}
GI1 0 3 4 2 {KT}
EV1 1 7 3 0 {KE}
RR2 4 2 {RA}
RR1 2 1 {RL}
LL1 2 1 {LA}
.ENDS AWBDCMOTOR
В LTSpice тоже должна работать, разве что придётся закомментировать две строки (EDUMMY1 и EDUMMY2), а за условиями следить самостоятельно.
--------------------
Russia est omnis divisa in partes octo.
|
|
|
|
|
|
|
|
May 15 2014, 20:15
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Tanya @ May 15 2014, 20:55) Какой генератор? Генератор не нужен. Напряжение на конденсаторе - интеграл от тока. Напряжение на двигателе - тоже интеграл от тока. Еще резистор последовательно - сопротивление якоря, резистор параллельно - нагрузка. Стоит напомнить вот это эпическое обсуждение - http://electronix.ru/forum/index.php?showtopic=116478Там DC двигатель представлялся системой второго порядка. Но даже не в этом суть. Номиналы элементов! Как узнать номиналы тех самых элементов модели? Можно построить, конечно, точную схему в Spice нотации. Потом симулировать ее с шагом в 1 мкс и получить через пару минут полную ахинею. Проще перейти к MATLAB и симулировать на системном уровне. И даже идентифицировать модель двигателя можно будет.
|
|
|
|
|
|
|
|
May 17 2014, 04:29
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(AlexandrY @ May 16 2014, 00:15) Стоит напомнить вот это эпическое обсуждение - http://electronix.ru/forum/index.php?showtopic=116478Там DC двигатель представлялся системой второго порядка. С Вашим подходом нужно учитывать квантовые эффекты и влияние Луны. И порядок системы может быть огромным. Там по вашей формуле уже субатомные расстояния очень быстро получаются, что очень важно для лифтов. Цитата(AlexandrY @ May 16 2014, 00:15) Но даже не в этом суть. Номиналы элементов! Как узнать номиналы тех самых элементов модели? Очень просто. Если есть описание, то оттуда, а если нет, - экспериментально. Вот, например, измеряем зависимость изменения скорости от интеграла тока (ток достаточно большой, время короткое, изменение скорости небольшое) получаем емкость конденсатора. Измеряем кривую торможения - получаем трение. Там должно быть два вида - вязкое (жидкое), которое моделируется резистором. Спад экспоненциальный - реакция первого порядка, радиоактивный распад. И постоянная сила трения - имитируется источником тока. Скорость линейно падает. Особенная точность и не требуется. Ведь в любом случае к мотору нечто подсоединено, что увеличивает приведенный момент инерции (емкость конденсатора) и трение. Таким образом, параметры в любом случае нужно варьировать, чтобы убедиться в сохранении робастности.
|
|
|
|
|
|
|
|
May 17 2014, 15:58
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
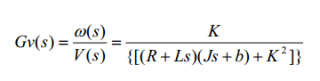
Цитата(Tanya @ May 17 2014, 07:29) С Вашим подходом нужно учитывать квантовые эффекты и влияние Луны. И порядок системы может быть огромным. Там по вашей формуле уже субатомные расстояния очень быстро получаются, что очень важно для лифтов. Влиянием луны занимается альтернативная электроника. Там я не в теме. А вот модель DC мотора сколько не искал везде представляют такой передаточной функцией:
Ничего особенного, просто 5-ть параметров и 2-й порядок. Кстати по напряжению на движке как следует из модели никак нельзя судить о скорости вращения. Т.е. предположение о том, что напряжение с движка сразу идет на регулятор скорости скорее всего не верное. На схеме явно не хватает тахометра. Если на роторе еще сидит некая механическая передача то порядок передаточной функции увеличивается и вдобавок она становится нелинейной. Хотя в реале она очевидно нелинейная даже для движка без нагрузки. Что там определить в модели по осциллографу врядли удастся, там нелинейности и шумы замаскируют всю картину. Вообщем симуляция результата не принесет. Нужно моделирование.
|
|
|
|
|
|
|
Guest_TSerg_*
|
May 17 2014, 17:04
|
Guests
|
Цитата(AlexandrY @ May 17 2014, 19:58) ...
Вообщем симуляция результата не принесет. Нужно моделирование. Вы глубоко не правы во многом, разжевывать именно Вам - желания нет. Конспектно - наличие инерции никак не может перевести линейную систему в нелинейную. P.S. Симуляция - есть моделирование. Подумайте.
|
|
|
|
|
|
|
|
May 18 2014, 06:08
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(TSerg @ May 17 2014, 20:04) Вы глубоко не правы во многом, разжевывать именно Вам - желания нет.
Конспектно - наличие инерции никак не может перевести линейную систему в нелинейную. Давайте уже не строить из себя мегаспециалистов. Я говорю, что студент бесполезно берется симулировать такую схему, потому как кучу времени убъет на симуляцию незначащих мелочей и борьбу за выбор правильного масштаба времени. А модель двигателя все равно так просто не определит по осциллографу, поскольку все будет забито шумами коллектора (нелинейность) , испорчено кривой намагничивания (нелинейность) , неидеальностью источника питания (нелинейность) и т.д. А мне разжовывать не надо. Cейчас читаю такую книжку: "Digital Control of Electrical Drives" Slobodan N. Vukosavić , там все разжевано по мелочам. Советую и вам освежить знания, чтобы возражать хотя бы по теме.
|
|
|
|
|
|
|
|
May 20 2014, 07:54
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
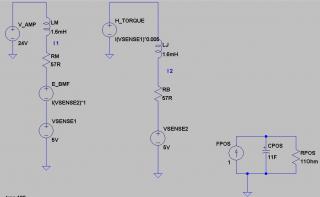
Привет всем, собственно после долгих поисков была найдена данная модель, но не получается почемуто её в лтспайс завязать: DC_MOTOR_MODEL.CIR * V_AMP 1 0 AC 1 PWL(0MS 0V 1MS 10V 1000MS 10V 1010MS 0V 2000MS 0V) * * MOTOR VOLTAGE RA 1 2 0.5 LA 2 3 0.0015 H_EMF 3 4 VSENSE2 0.05 VSENSE1 4 0 DC 0V * * MOTOR TORQUE BASED ON INERTIA AND FRICTION H_TORQ 6 0 VSENSE1 0.05 LJ 6 7 0.00025 RB 7 8 0.0001 VSENSE2 8 0 DC 0V * * MOTOR POSITION FPOS 0 11 VSENSE2 1 CPOS 11 0 1 RPOS 11 0 1MEG * * ANALYSIS .TRAN 10MS 2000MS * * VIEW RESULTS .PRINT TRAN V(1) I(VSENSE1) .PROBE .END Цитата(AlexandrY @ May 17 2014, 22:08) Влиянием луны занимается альтернативная электроника. Там я не в теме. А вот модель DC мотора сколько не искал везде представляют такой передаточной функцией:
Ничего особенного, просто 5-ть параметров и 2-й порядок. Кстати по напряжению на движке как следует из модели никак нельзя судить о скорости вращения. Т.е. предположение о том, что напряжение с движка сразу идет на регулятор скорости скорее всего не верное. На схеме явно не хватает тахометра. Если на роторе еще сидит некая механическая передача то порядок передаточной функции увеличивается и вдобавок она становится нелинейной. Хотя в реале она очевидно нелинейная даже для движка без нагрузки. Что там определить в модели по осциллографу врядли удастся, там нелинейности и шумы замаскируют всю картину. Вообщем симуляция результата не принесет. Нужно моделирование. Это я тоже в конспекте по системной теории нашёл. Тахометра нету, сегодня переспрашивали у препода, скорость снимается на прямую с мотора, хотя он сам не знает как :D, что улыбнуло, схеме 20 лет, мастерил какой-то лаборант который уже умер давно, схема рабочая, мы запускали ту которая к SPS подключена, единственно что регулировка какая-то угшная, мотор крутится в одну сторону быстрее чем в другую, на транзисторах через 5 минут можно жарить яишницу, мы молили о ШИМ, были снова посланы в лес
|
|
|
|
|
|
|
|
May 20 2014, 07:55
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Цитата(AlexandrY @ May 18 2014, 12:18) Давайте уже не строить из себя мегаспециалистов. Я говорю, что студент бесполезно берется симулировать такую схему, потому как кучу времени убъет на симуляцию незначащих мелочей и борьбу за выбор правильного масштаба времени. А модель двигателя все равно так просто не определит по осциллографу, поскольку все будет забито шумами коллектора (нелинейность) , испорчено кривой намагничивания (нелинейность) , неидеальностью источника питания (нелинейность) и т.д. А мне разжовывать не надо. Cейчас читаю такую книжку: "Digital Control of Electrical Drives" Slobodan N. Vukosavić , там все разжевано по мелочам. Советую и вам освежить знания, чтобы возражать хотя бы по теме. Тоесть вы считаете что мы в симуляции абсолютно ничего не увидим?
|
|
|
|
|
|
|
|
May 20 2014, 08:03
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
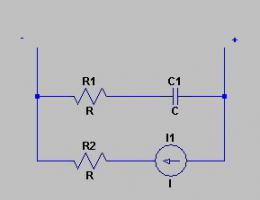
Цитата(Tanya @ May 20 2014, 14:05) LTSPICE с удовольствием съест конденсатор с двумя резисторами и генератором тока. Вот что нарисовал пока-что, второй раз в жизни в спайсе работаю :/ Цитата(Tanya @ May 20 2014, 14:12) Немножко поменять величины и... получите возбуждение и ШИМ. Там если потенциометры крутить, в какой-то момент ШИМ и получался, но препод так не хочет :/
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
May 20 2014, 08:07
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(RulerOfCats @ May 20 2014, 16:12) Вот что нарисовал пока-что, второй раз в жизни в спайсе работаю :/ Вы не поняли. Просто вместо мотора рисуете конденсатор с последовательным резистором (сопротивление якоря). Параллельно этой цепочке - резистор (трение) и генератор тока (постоянная сила). Цитата(RulerOfCats @ May 20 2014, 16:13) Там если потенциометры крутить, в какой-то момент ШИМ и получался, но препод так не хочет :/ Можно дроссель последовательно добавить... Или радиаторы.
|
|
|
|
|
|
|
|
May 20 2014, 08:15
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Цитата(Tanya @ May 20 2014, 14:17) Вы не поняли. Просто вместо мотора рисуете конденсатор с последовательным резистором (сопротивление якоря). Параллельно этой цепочке - резистор (трение) и генератор тока (постоянная сила).
Можно дроссель последовательно добавить... Или радиаторы. Вот алюминивые радиаторы это единственное что нам пока в голову приходило XD Так чтоли? оО
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
Guest_TSerg_*
|
May 20 2014, 08:36
|
Guests
|
Цитата(AlexandrY @ May 18 2014, 14:18) Давайте уже не строить из себя мегаспециалистов.
Советую и вам освежить знания, чтобы возражать хотя бы по теме Вы изрекли очевидные глупости, с точки зрения просто специалиста, даже не мега-*. О чем Я Вас известил. Книжки по двигателям мне читать не надо (разве, что для ознакомления с вариантными мнениями), поскольку по моим - учились студенты и неплохо учились. Одной из классических студенческих лабораторных работ в практике изучения двигателей и электропривода того времени, как раз являлось осциллографическое определение динамических свойств как двигателя, так и привода, по современному - определение свойств моделей. В общем, читайте Шура, читайте.
|
|
|
|
|
|
|
|
May 20 2014, 09:24
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(AlexandrY @ May 20 2014, 17:06) Таня, концептуально не верно предлагаете. Я так не думаю. Вот рассмотрите два одинаковых мотора - один вращается, другой неподвижен. Соединяем их. (электрически). Скорость в конце будет равная половине исходной. Прямо, как в конденсаторах напряжение. И происходит это оттого, что уравнения идентичны. "Математика - это искусство называть разные явления одинаковыми словами."
|
|
|
|
|
|
|
|
May 20 2014, 13:32
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Tanya @ May 20 2014, 16:34) Я так не думаю. Вот рассмотрите два одинаковых мотора - один вращается, другой неподвижен. Соединяем их. (электрически).
Скорость в конце будет равная половине исходной. Прямо, как в конденсаторах напряжение.
И происходит это оттого, что уравнения идентичны.
"Математика - это искусство называть разные явления одинаковыми словами." Или прямо как ток в индуктивностях, или вода в трубах, или температура в радиаторах, или длина у пружины... Эти все умозрительные построения хороши для моделей первого порядка. А здесь модель второго порядка как минимум. Но вообще если действительно тахометра нет, то вся схема всего лишь регулирует выходную мощность. Значит двигатель можно вообще заменить резистором с переменным сопротивлением.
|
|
|
|
|
|
|
Guest_TSerg_*
|
May 20 2014, 14:21
|
Guests
|
Цитата(AlexandrY @ May 20 2014, 17:06) Таня, концептуально не верно предлагаете.
Вы пытаетесь электрическими компонентами заменить типичные изображения по лапласу, но забываете что в схемах по лапласу связи строго однонаправленные, когда же соединяете компоненты на схеме вы последующими элементами влияете на предыдущие, т.е. образуются обратные связи. Хоспидя! И это говорит инженегр-разработчик? Лапласовы выражения - это те же дифф.уры, только вид сбоку. Я просто валяюсь с современных манагеров. Не удивительно, что подавай им крутые процы, терабайты памяти и ежегодное обновление Windows/Oracle + обязательный переход на Clouds-calc - иначе они ничего не смогут.
|
|
|
|
|
|
|
|
May 20 2014, 16:41
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(TSerg @ May 20 2014, 21:31) Лапласовы выражения - это те же дифф.уры, только вид сбоку. Мда, ... Великим "преподователям" объясню. В некоторых книгах таких как: Дорф Р., Бишоп Р. "Современные системы управления" или Бесекерский В.А."Теория систем автоматического управления" могут с легкостью в принципиальную схему вставить s-блок по Лапласу. Но связи между s-блоками принципиально не электрические их нельзя мешать в принципиальную схему. Бесекерский даже изображает апериодические звенья конденсаторами и резисторами и двигатель кстати тоже конденсатором. Но это все равно s-блоки. Вставлять их в схему для симуляции есть глупость.
|
|
|
|
|
|
|
|
May 21 2014, 01:35
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(AlexandrY @ May 20 2014, 21:42) Значит двигатель можно вообще заменить резистором с переменным сопротивлением. Продолжаю настаивать на своей правоте. А порядок системы может быть любой в данном случае. Вот 2-закон Ньютона какого порядка? Если записать икс с двумя точками как скорость с точкой? Точки -... это я так Ваши любимые буквы p унижаю. А вот если рассмотреть колебания всех атомов, то порядок системы можно успешно повысить... Цитата(AlexandrY @ May 21 2014, 00:51) Но это все равно s-блоки. Вставлять их в схему для симуляции есть глупость. Нет. Двигатель в электрической цепи в первом приближении НЕОТЛИЧИМ от конденсатора с резисторами. А резистор полностью заменяет заклинивший двигатель. Но мы не должны заклиниваться.
|
|
|
|
|
|
|
|
May 21 2014, 02:42
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Tanya @ May 21 2014, 08:45) Нет. Двигатель в электрической цепи в первом приближении НЕОТЛИЧИМ от конденсатора с резисторами. Я не спорю, что внутри s-блока вы можете рисовать что угодно, хоть электрические аналогии хоть гидравлические. И законно утверждать, что все эти представления эквивалентны. Но соединять в симуляторе напрямик эти аналогии нельзя. Простейший пример: Возьмем два резистивных делителя на 2. Соединив их в симуляторе один на выход другого вы получите на выходе сигнал поделенный на 5 А если представите делители s-блоками, соедините их, то на выходе будет сигнал поделенный на 4 Когда говорим о модели 2-го порядка, вы пытаетесь соединить эквивалентные внутренности s-блоков представленных электрическими элементами последовательно как электрические цепи. Получаете в результате неверную модель.
|
|
|
|
|
|
|
|
May 21 2014, 03:08
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(AlexandrY @ May 21 2014, 10:52) Я не спорю, что внутри s-блока вы можете рисовать что угодно, хоть электрические аналогии хоть гидравлические. И законно утверждать, что все эти представления эквивалентны. Я разве упоминала какие-то там блоки? Я ведь только банально настаиваю на том, что... приходится писать банальные вещи - Вот двигатель - производная скорости = A* ток + B* момент внешней силы - C* скорость/модуль скорости (- это обычное трение) - D* скорость (- это жидкое трение). Вот конденсатор с добавками - Производная напряжения = A'*ток + (B'*ток добавочного генератора тока1+C'*ток добавочного генератора тока2) - D'*напряжение/сопротивление добавочного резистора. Уравнения идентичны после учета уравнения связи - напряжение на якоре без учета падения напряжения на его сопротивлении = константа* скорость. Нужно только учесть смену знака (переключить - перевернуть один из генераторов тока трения при смене знака напряжения на конденсаторе), а второй, имитирующий внешний момент оставить. Этот второй генератор тока имитирует двигатель в режиме генератора, крутимого нами для интереса. Константы со штрихом равны обратной емкости и добавлены только для наглядности.
|
|
|
|
|
|
|
|
May 21 2014, 04:06
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Tanya @ May 21 2014, 10:18) Я ведь только банально настаиваю на том, что... Пока я не понял ваши банальные вещи. Придется перейти к цитированию.
Это из Дорф Р., Бишоп Р. Современные системы управления Если верить TC, то скорость двигателя никак не контролируется ибо нет тахометра. Т.е. обычные модели связи напряжения на двигателе и его скорости нам не нужны. Нас интересует только зависимость тока от напряжения на двигателе. Как я понял, вы предлагаете примитивизировать до того что приравнять Ra и La нулю оставив только инерцию. Т.е. составляющую Vb(s) в уравнении 2.65 Но это, заметьте, не резистор с конденсатором, а управляемый источник напряжения! Но скажем я согласен, что этот источник напряжения управляемый напряжением на той самой RC цепи представляющей инерцию (кстати у студента это LR цепь  ). Но хитрая нагрузка может полностью исказить такое простое влияние инерции и в сущности мы получим просто хаотически изменяющийся источник напряжения. Насчет замены резистором я наверно ошибся, но вот замена источником напряжения вполне выглядит логично. Т.е. если уж симулировать, то начать надо бы с изучения устойчивости всей схемы нагруженной на источник постоянного напряжения.
|
|
|
|
|
|
|
|
May 21 2014, 04:19
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(AlexandrY @ May 21 2014, 12:16) Пока я не понял ваши банальные вещи. Если верить TC, то скорость двигателя никак не контролируется ибо нет тахометра. Т.е. обычные модели связи напряжения на двигателе и его скорости нам не нужны. ТС поправился - скорость контролируется (и регулируется) по напряжению на якоре с коррекцией падения напряжения на его сопротивлении. Он подтвердил мои предположения об этом... Там у двигателя нарисованы стрелочки - но провода почему-то не нарисованы. Цитата(AlexandrY @ May 21 2014, 12:16) Пока я не понял ваши банальные вещи. Как я понял, вы предлагаете примитивизировать до того что приравнять Ra и La нулю оставив только инерцию. Т.е. составляющую Vb(s) в уравнении 2.65 Ваши (цитируемые Вами) уравнения полностью описывают мой конденсатор с добавками. Вот только в последнем посте забыла упомянуть, упомянутую ранее индуктивность дросселя (якоря) и его сопротивление. Почему я предлагаю (и настаиваю на своей правоте) - только потому, что это не только эквивалентно, но и в 100500 раз проще для ТС (и не только) использовать электронный симулятор - ведь там нарисованы два ПИ-регулятора на конкретных ОУ, оптроны, транзисторы и прочие детали, в которых электронный симулятор прекрасно разбирается и нет нужды писать модели этих компонентов для матлаба.
|
|
|
|
|
|
|
|
May 21 2014, 04:50
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Tanya @ May 21 2014, 11:29) ... но и в 100500 раз проще для ТС (и не только) использовать электронный симулятор - ведь там нарисованы два ПИ-регулятора на конкретных ОУ, оптроны, транзисторы и прочие детали, в которых электронный симулятор прекрасно разбирается и нет нужды писать модели этих компонентов для матлаба. Схема реально адская. Симуляторы на таких схемах гарантировано спотыкаются. Во первых каскад на оптронах жутко нелинейный. По уму надо было бы его линеаризовать глубокой обратной связью по напряжению. Обратную связь кинуть на U2/1 и сделать его коэффициент передачи гораздо больше. Дальше два интегратора это же классический автогенератор. Тут что-то не так. Возможно тот кто спроектировал схему слизал ее с системы которая отслеживала линейно нарастающий сигнал и имела тахометр. Здесь думаю один интегратор лишний. Но все это надо проверять имея уже линейный выходной каскад. ТС явно не сможет разработать простой для симуляции линейный каскад, тут еще проблемы с развязкой земель и т.д. Вот тут MATLAB и нужен. Поставил линейный блок и вся проблема решена и можно заниматься синтезом управления, а не борьбой с кривизной.
|
|
|
|
|
|
|
|
May 26 2014, 07:12
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Цитата(Tanya @ May 20 2014, 14:42) Не попали. Немного. А как? >.< Цитата(TSerg @ May 20 2014, 14:46) Вы изрекли очевидные глупости, с точки зрения просто специалиста, даже не мега-*.
О чем Я Вас известил.
Книжки по двигателям мне читать не надо (разве, что для ознакомления с вариантными мнениями), поскольку по моим - учились студенты и неплохо учились.
Одной из классических студенческих лабораторных работ в практике изучения двигателей и электропривода того времени, как раз являлось осциллографическое определение динамических свойств как двигателя, так и привода, по современному - определение свойств моделей.
В общем, читайте Шура, читайте. А где вы преподавали? Вообщем сейчас снова заново всё собрали на плате, вообщем вообще чудеса какие-то, 24 В выключено, мотор крутится и регулируется, включаем 24 вольта, перестаёт :D
Сообщение отредактировал RulerOfCats - May 26 2014, 07:09
|
|
|
|
|
|
|
|
May 26 2014, 08:03
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(RulerOfCats @ May 26 2014, 15:22) А как? >.< Да особенной разницы нет... Конденсатор. Параллельно конденсатору генератор тока (это будет трение и (или) другая постоянная внешняя сила). Последовательно с конденсатором - резистор, с номиналом, равным сопротивлению обмоток ротора. Параллельно генератору тока - еще один резистор - это жидкое трение. Можно два генератора - один должен переворачиваться (менять полярность в зависимости от напряжения на конденсаторе) - так будет имитироваться трение. Это если хотите менять направление вращения. Второй генератор - может отсутствовать. Последовательно с конденсатором можно добавить дроссель с индуктивностью, равной индуктивности обмотки. Цитата(RulerOfCats @ May 26 2014, 15:22) Вообщем сейчас снова заново всё собрали на плате, вообщем вообще чудеса какие-то, 24 В выключено, мотор крутится и регулируется, включаем 24 вольта, перестаёт :D Т.е он крутится без питания? Вы сделали вечный двигатель! Сами?
|
|
|
|
|
|
|
|
Jun 20 2014, 11:52
|
Участник
Группа: Участник
Сообщений: 27
Регистрация: 11-05-10
Пользователь №: 57 193
|
Нашли в чем дело-то? Думаю, что курсовик давно сдан.
Мне не понравились резисторы в эмиттерах Т2,Т4, 5 ампер (24В/4.7Ом) вполне способны убить биполяр. По даташиту у него ток коллектора 4А, пиковый - 6.
Соответственно, посмотреть часть управления, чтобы ключи не были открытыми одновременно
|
|
|
|
|
|
|
|
Sep 22 2014, 11:13
|
Группа: Участник
Сообщений: 13
Регистрация: 7-05-14
Пользователь №: 81 608
|
Привет. Извините что долго не писали, вообщем родили мы. Разобрались и без ЛТспасйса. Вообщем на транзисторы нацепили радиаторы, которые расчитали по принцыипу R_th=delta T/P, P=U*I (U_ce, I_c). В регулировку добавили дроссел достойный таких дебилов как мы, после первого PI: ---10 kOhm----diod----diod----diod-----diod------------------------ ---diod bw----diod bw -----diod bw----diod bw------GND Дроссел встроили, т.к. у мотора летит передаточный механизм, если он тянет тока больше чем 120-140 мА... Сделали новый лэйаут в игле, вообще решение унылое, но теперь всё работает XD Благодарим всех за советы
|
|
|
|
|
|
|
|
2 чел. читают эту тему (гостей: 2, скрытых пользователей: 0)
Пользователей: 0

|
|
|