| |
|
  |
 Разработка комплекса программа+железо LPT/USB для станков Разработка комплекса программа+железо LPT/USB для станков, Рабочее название "Конь В Вакууме" |
|
|
|
|
 Jan 30 2017, 02:34 Jan 30 2017, 02:34
|
Участник

Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698

|
"Конь в Вакууме" - это аппаратно - программный комплекс, умеющий работать как со всеми существующими, так и с перспективными интерфейсами и выполнять уже существующие и ещё нет задания. Собственно, нужно сделать контроллер для станка и программу для контроллера. В интерфейсе LPT есть 12 пинов, работающих на выход. Обычно управление станком с компьютера осуществляется сигналами шаг-направление и есть 6 осей, которые могут рабтать одновременно, или практически одновременно. На вход могут работать 5 пинов. Задача состоит в том, что бы расширить возможности станка путём последователиной передачи данных через LPT в контролер. Из 12-и пин выхода LPT, 6 пинов остаются работать в режиме "шаг". 4 пина задают адрес, 1-данные, 1-синхро импульс. Из 16-и адресов 6 задают смену направления оси, 1 начало и конец введения адреса, 1 предназначен для введения адреса, 1-команда " адрес + 1" с записью данных в ячейку памяти по каналу данных; 1 адрес - обнуление отсчёта "адрес + 1" Все данные изначально записываются в ячейки в 1-битном формате. Одна ячейка может быть предназначена для включения опроса концевика, включения/выключения реле, установления деления шага/кратности шагов для ускоренного режима серводвигателя. В случае когда 1-го бита не хватает, используется несколько с соседними адресами. Для разработки программы предполагается найти исходники чего-либо или заказать дополнения в программу разработчикам мач4. При этом вроде как раньше можно было купить исходники Mach 3, а в линуксе (для линукс ЦНЦ) вообще исходники должны быть открытыми. Выбор порта LPT, не в пользу остальных, обусловлен двумя факторами: высокой скоростью работы (на практике) и его простотой, пониманием его устройства. Со временем можно добавить возможность работы через USB 2-3, ethernet.   
|
|
|
|
|
|
|
|
Jan 30 2017, 20:44
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Возможно и не стоит усложнять.
При вращении стандартного шагового двигателя 200 имп/об в полушаговом режиме со скоростью 50 об/с частота импульсов составит 50*200*2=20 000 имп/с.
Вопрос: USB выдаст стабильно 20 000 имп/с по 6-и осям одновременно? Обеспечит ли USB обработку 1000 ячеек памяти по 1-му биту? На сколько стабильно это будет работать? Может там обратную связь получится сделать и обрабатывать её в реальном времени? Как это в железе реализовать? Есть плата rs485, может через неё можно управление станком сделать?
Сообщение отредактировал Леонид Григорьевич - Jan 30 2017, 20:49
|
|
|
|
|
|
|
|
Jan 31 2017, 05:07
|
Знающий
Группа: Участник
Сообщений: 825
Регистрация: 16-04-15
Из: КЧР, Нижний Архыз
Пользователь №: 86 250
|
1) Вообще-то, импульсы микроконтроллер выдавать должен, а USB нужно только для его общения с ПК. 2) Где вы видели шаговик, который умеет 50*200=10000 шагов в секунду? Пределом, который я встречал (на потере мощности в 50%) было 600-800 шагов в секунду! Даже при делении шага на 16 это достаточно мало, чтобы одновременно можно было 3-5 шаговиками с одного МК управлять. Справится даже копеечный STM8S003. Хоть я больше STM32 уважаю, но и для STM8 делал управлялку шаговиками. В случае станка помех может быть очень много, поэтому — да, там предпочтительней RS-485 или CAN для связи с компутером. Ну или сразу компутер в станок пихать, благо, какие-нибудь убогие "малинки" стоят рублей 600!
|
|
|
|
|
|
|
|
Jan 31 2017, 09:50
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
1. Компьютер нужен для обеспечения линейной/круговой интерполяции одновременно по 3-м осям. Пример- нарезание конусной резьбы. Если это будет делать контроллер, он будет почти полностью дублировать функции компьютера. На практике такие устройства стоят порядка 100-200 тыс. руб. Типа НЦ201-НЦ400
|
|
|
|
|
|
|
|
Jan 31 2017, 10:41
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
2. Расчёт 20 000 шагов в секунду сделан для обозначения предельных параметров системы. Были американские программы, которые не выдавали достаточной частоты, и на этом фоне Mach начал заметно выигрывать. Возможно, в станке будут стоять серводвигатели, и они будут управляться так же сигналом шаг/направление. Может быть с разными коэффициентами - 100, 1000, 10 000 имп/оборот.
3. Перечисленные контроллеры буду изучать. Сомнения в быстродействии системы на USB связано ещё с тем фактом, что прошивка контроллеров через порт LPT проходит в 2 раза быстрее, чем по USB. По этому было бы хорошо обеспечить возможность работы как по USB, так и по LPT. Начать лучше с LPT.
Вопрос по rs485 наверное придётся выделить в отдельную тему. Пока нет программы для работы станка через rs485 и ответных устройств, таких как серводвигатели rs485, реле rs485, концевики rs485. В природе возможно это есть, нужно искать. Или создавать.
4. Можно подробнее про "малинки" по 600 р?
Плата от 3d принтера даёт ограниченные возможности. Суть вопроса о создании контроллера с расшимяемыми возможностями. Например, плата с двумя rs485 обеспечивает обмен информацией с 254 устройствами, из них 64 физических.
Был станок, который работал через rs232 (com порт). Работать он начал после устранения всех контакторов и замены на тиристоры.
|
|
|
|
|
|
|
|
Jan 31 2017, 11:10
|
Знающий
Группа: Участник
Сообщений: 825
Регистрация: 16-04-15
Из: КЧР, Нижний Архыз
Пользователь №: 86 250
|
Цитата(Леонид Григорьевич @ Jan 31 2017, 13:41)  Сомнения в быстродействии системы на USB связано ещё с тем фактом, что прошивка контроллеров через порт LPT проходит в 2 раза быстрее, чем по USB Это еще что за фантастика? USB даже в режиме CDC обеспечивает как минимум мегабит в секунду! А уж если полноценный FS поднять, так совсем хорошо будет. А LPT — жутко тормозящий интерфейс. Не говоря уже о том, что параллельные порты уже давно вымирают. Все меньше шансов встретить материнку с аппаратным LPT. Цитата В природе возможно это есть, нужно искать. Или создавать. Ничего сложного. И совсем недорого будет по железу. Цитата Можно подробнее про "малинки" по 600 р? aliexpress, ebay И вообще, лучше начать с реального чего-то, а потом расширять функционал. Если сразу строить наполеоновские планы, так можно и закончить ни с чем...
|
|
|
|
|
|
|
|
Feb 1 2017, 11:57
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Ну у меня станина уже готова и посадочные места под двигатели и ШВП http://www.16b16t1.ruС прошивкой контроллера тормозит программатор, сделанный на таком же контроллере. Время уходит на преобразование сигналов. Я не думаю, что у меня получится лучше устройство сделать и оно такой эффект не выдаст. Есть супер-интерфейс EtherCAT. 10 КГц частота тактирования сервы по 100 осям. Но мне все таки кажется реальные сделать устройство на базе LPT, потому что проще LPT нет ничего. А по ресурсам - 6 одновременно работающих осей хватает за глаза. С частотой шагов тоже справляется, даже под Winds. Про малинки так и не понял, это нетбуки малинового цвета или что искать нужно?
|
|
|
|
|
|
|
|
Feb 1 2017, 14:04
|
Знающий
Группа: Свой
Сообщений: 608
Регистрация: 10-07-09
Из: Дубна, Московская область
Пользователь №: 51 111
|
Цитата(Леонид Григорьевич @ Jan 31 2017, 12:50) 1. Компьютер нужен для обеспечения линейной/круговой интерполяции одновременно по 3-м осям. Пример- нарезание конусной резьбы. Если это будет делать контроллер, он будет почти полностью дублировать функции компьютера. А где гарантия что вовремя рассчитанное компьютером новое значение попадет на исполнительное устройство (т.е. пройдет весь путь от ПК до двигателя) без задержек? Если на ПК вертится операционка типа винды или линукса - то время между тем когда команда была послана и тем когда она физически уйдет в МК может плыть с большущей вариантностью. Так что может пусть МК дублирует полностью работу ПК - в таком случае шансы получить неожиданную деталь снизятся.
|
|
|
|
|
|
|
|
Feb 1 2017, 14:11
|
Местный
Группа: Свой
Сообщений: 491
Регистрация: 16-01-05
Из: Санкт-Петербург
Пользователь №: 1 987
|
Цитата(Эдди @ Jan 31 2017, 14:10) Это еще что за фантастика? USB даже в режиме CDC обеспечивает как минимум мегабит в секунду! А уж если полноценный FS поднять, так совсем хорошо будет. А LPT — жутко тормозящий интерфейс. Ну, вообще-то LPT вовсе не тормозящий, особенно в сравнении с USB LS и даже FS. И особенно для задач, где важно время отклика удаленной системы (пример - любой JTAG адаптер или, скажем, SPI программатор, в общем, любая задача с BitBang'ом). Время чтения или записи регистра данных LPT - порядка длительности цикла ISA-шины, а это порядка 1 мкс в худшем случае. Считая время формирования реакции на запись в подключенном устройстве =0 (чтобы получить крайнюю оценку), имеем время отклика tResponse = 2 * 1us = 2 us, что дает оценку теоретического предела частоты воздействий fControl = 1 / 2us = 0.5 MHz. Теперь учтем время реакции управляемого объекта - пусть это будет еще 2 мкс (что, согласитесь, весьма расслабленно для современной электроники). В результате имеем: tResponse = 2 us + 2 us = 4 us fControl = 1/tResponse = 1/(4E-6) = 250 kHz А что у нас в USB системе? Воздействия/отклики USB device привязаны к хождению по USB их фреймов, период следования которых для LS/FS 1 ms. В результате имеем : tResponse = 1ms + 1 ms = 2 ms fControl = 1 / 2 ms = 500 Hz И в любом случае частота считывания параметра, на который мы воздействуем, будет не лучше 1000 Hz (=1/1ms). Вывод: если подключать через USB - надо хотя бы часть функционала, ту, которая требует быстрого отклика на воздействие, переносить на устройство, локализовывать. С LPT (если он есть еще под рукой :-), конечно) - можно попробовать чем-то поуправлять, вычисляя все необходимое на PC. Цитата(Эдди @ Jan 31 2017, 14:10) Не говоря уже о том, что параллельные порты уже давно вымирают. Все меньше шансов встретить материнку с аппаратным LPT. Это да. С перспективной точки зрения надо смотреть на варианты с локализованной частью функционала, который может бегать на, скажем, подходящем контроллере с USB интерфейсом. Но если ТС имеет LPT под рукой, и он ему ближе и понятнее, то первую реализацию можно и на LPT сделать. Только декомпозировать фунционал надо сразу с оглядкой на будущую локализацию процедур быстрой реакции на устройстве непосредственного управления.
|
|
|
|
|
|
|
|
Feb 1 2017, 16:44
|
Профессионал
Группа: Свой
Сообщений: 1 700
Регистрация: 2-07-12
Из: дефолт-сити
Пользователь №: 72 596
|
качественно правильный вариант с точки зрения долговечности, предсказуемости и производительности - разрабатывать сразу, на старте, с использованием интерфейса PCI-Express.
Т.е. нужно взять например какую-нибудь отладочную плату с ПЛИС (Altera, Xilinx - что больше по душе) и начать с неё.
Ввод-вывод, скажем, 200-300 цифровых сигналов одновременно с низкой задержкой обработки и предсказуемости по времени исполнения требует применения именно ПЛИС.
Ну а далее, владея нструментарием, доступным в ПЛИС, вы дальше сможете не задумываясь набирать количество датчиков и исполнительных устройств исходя из принципа "а сколько надо?" вместо логики "а сколько успею?" при использовании какого-нибудь LPT или RS232/RS485.
--------------------
провоцируем неудовлетворенных провокаторов с удовольствием.
|
|
|
|
|
|
|
|
Feb 1 2017, 18:21
|

Гуру
Группа: Свой
Сообщений: 13 372
Регистрация: 27-11-04
Из: Riga, Latvia
Пользователь №: 1 244
|
Цитата(Raven @ Feb 1 2017, 16:11) С LPT (если он есть еще под рукой :-), конечно) - можно попробовать чем-то поуправлять, вычисляя все необходимое на PC. Забыли про необходимость написания некоего драйвера, который позволит все эти оптмистичные тайминги не на голой железке, а на машине Lin/Win реализовать. Тем радиолюбителям, которые для автора явились образом для подражания, какой то драйвер кто под 32bit Win написал. Под 64bit драйвера нет, вот вся эта их поделка и не работает.
--------------------
Feci, quod potui, faciant meliora potentes
|
|
|
|
|
|
|
|
Feb 1 2017, 19:11
|
Местный
Группа: Свой
Сообщений: 491
Регистрация: 16-01-05
Из: Санкт-Петербург
Пользователь №: 1 987
|
Цитата(zltigo @ Feb 1 2017, 21:21) ...Под 64bit драйвера нет, вот вся эта их поделка и не работает. Все есть. Этот вопрос решили радикально. С исходниками. InpOut32InpOut32-x64
|
|
|
|
|
|
|
|
Feb 1 2017, 19:55
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Цитата(Александр77 @ Feb 1 2017, 19:04) А где гарантия что вовремя рассчитанное компьютером новое значение попадет на исполнительное устройство (т.е. пройдет весь путь от ПК до двигателя) без задержек? Если на ПК вертится операционка типа винды или линукса - то время между тем когда команда была послана и тем когда она физически уйдет в МК может плыть с большущей вариантностью.
Так что может пусть МК дублирует полностью работу ПК - в таком случае шансы получить неожиданную деталь снизятся. Гарантией может стать осцилограф. Нужно симулировать нарезание резьбы и смотреть рассогласование, в микронах. Если в допуске - одно дело, если нет - другое. Остальное, на практике, не имеет значения. В станке с внешним контроллером работу станка было невозможно вовремя остановить (гарантированно). Хотя перечисленные здесь контроллеры можно попробовать в работе. Цитата(krux @ Feb 1 2017, 21:44) разрабатывать сразу, на старте, с использованием интерфейса PCI-Express. Вариант прикольный. Не делать отдельный корпус, а засунуть все в системный блок. Про EtherCat: сервопривод с EtherCat стоит на 9000р дороже абсолютно такого же без EtherCat.
|
|
|
|
|
|
|
|
Feb 1 2017, 20:33
|

Местный
Группа: Участник
Сообщений: 201
Регистрация: 28-07-16
Пользователь №: 92 747
|
Цитата(Леонид Григорьевич @ Jan 30 2017, 02:34) Выбор порта LPT, не в пользу остальных, обусловлен двумя факторами: высокой скоростью работы (на практике) и его простотой, пониманием его устройства. Со временем можно добавить возможность работы через USB Я на таких полусамопальных станках с управлением от ПК с LPT в прошлом веке работал. Удовольствие еще то. Дело, конечно, Ваше, но не советую формировать управляющие воздействия напрямую из ПК. Считаю идеологически верным подходом изготовление отдельного блока системы управления (БСУ). Управляющую программу в БСУ заливать из ПК по USB, Ethernet или любым удобным способом. БСУ будет формировать управляющие воздействия независимо от ПК и так, как Вам нужно. Цитата(Александр77 @ Feb 1 2017, 14:04) А где гарантия что вовремя рассчитанное компьютером новое значение попадет на исполнительное устройство (т.е. пройдет весь путь от ПК до двигателя) без задержек? Если на ПК вертится операционка типа винды или линукса - то время между тем когда команда была послана и тем когда она физически уйдет в МК может плыть с большущей вариантностью.
Так что может пусть МК дублирует полностью работу ПК - в таком случае шансы получить неожиданную деталь снизятся. Да-да! Загубленная заготовка быстро убеждает, что дешевизна ПК-управления очень сомнительная.
--------------------
"Классики марксизма говорили, что общественно-экономическая формация меняется с изменением средств производства, которые всегда принадлежали имущему классу.
И сейчас мы находимся в системе координат капитализма, когда самые передовые средства производства принадлежат уже не капиталистам.
Люди, у которых нет обуви, имеют гаджеты. Сейчас создана такая информационная паутина, что вместо коллективного бессознательного можно говорить о коллективном сознании.
Если иметь мозги и гаджеты, можно перевернуть весь мир. Коллективное сознание будет управлять миром! Это исторический путь, который нельзя миновать."
Вячеслав Мальцев
|
|
|
|
|
|
|
|
Feb 2 2017, 14:03
|
Знающий
Группа: Свой
Сообщений: 608
Регистрация: 10-07-09
Из: Дубна, Московская область
Пользователь №: 51 111
|
Цитата(Леонид Григорьевич @ Feb 1 2017, 22:55) Гарантией может стать осцилограф. Нужно симулировать нарезание резьбы и смотреть рассогласование, в микронах. Если в допуске - одно дело, если нет - другое. Остальное, на практике, не имеет значения. В станке с внешним контроллером работу станка было невозможно вовремя остановить (гарантированно). Напоминает один из законов Мерфи "Измеряй микрометром, отмечай мелом, руби топором". Я конечно далек от металлообработке, но измерять или симулировать нарезку резьбы с помощью осциллографа - это смело!!! 
|
|
|
|
|
|
|
|
Feb 3 2017, 00:00
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Физика стала точной наукой когда взяла в руки весы. В нашем случае есть 3 оси, работающих одновременно и циклически: ось шпинделя, ось продольной подачи т ось поперечной подачи. На шпиндель подаётся 1000 импульсов в секунду. За это время он делает 10 оборотов. Как бы там ни было, при равномерной подаче импульсов расстояние между ними на экране осцилографа всегда будет одинаковым. При увеличении расстояния между двумя импульсами в 2 раза отклонение от заданной позиции составит 1/100 оборота. По продольной оси за то же время пройдёт (10 оборотов x 200 имп. на оборот в двигателе x 2, полушаговый режим x 1, шаг резьбы 2мм=шагу швп 2мм.) 4000 импульсов. При этом увеличение расстояния между двумя имп. в 2 раза приведёт к появлению неравномерности в 0,005 мм. Загрузка по 3-й оси нужна для нагружения процессора и остального железа. С внешним контроллером было 4 проблемы: первые две - его было невозможно мгновенно остановить и он был очень чувствителен к помехам. Вторые две - он жил своей жизнью и было только одному богу известно, что он делает. Например, когда станок сам делает натяги перед проходами, хоть и не правильно, это ещё не так страшно. Но когда он вместо сферы вытачивает непонятно что и невозможно разобраться, какие сигналы приходят на контроллер и почему он так себя ведёт, это уже геморой. Хотя я не утверждаю, что все внешние контроллеры такие. Цитата(@Ark @ Feb 2 2017, 03:08) Да, именно так. Так оно и планируется. Только в случае с LPT (внимательно прочитайте первый пост, после слова Вакуум  вся геометрия и синхронизация осей между собой оставались в компьютере. На внешний блок возлагается расширение функционала, такое как переключение работы с осями, изменение коэффициентов шагового режима (100-1000-10 000 шагов оборот) и работа с неограниченным количеством датчиков и реле. Цитата(zltigo @ Feb 2 2017, 02:45) Это просто дырка для обращения к физическому адресу Это уже половина того, что нужно. Когда в одной программе идёт симуляция обработки, другая программа может брать данные и передавать их на исполнение в контроллер. Если это та дырка, о которой я думаю.
|
|
|
|
|
|
|
|
Feb 3 2017, 06:40
|

Беспросветный оптимист
Группа: Свой
Сообщений: 4 640
Регистрация: 26-12-07
Из: Н.Новгород
Пользователь №: 33 646
|
Цитата(Эдди @ Jan 30 2017, 08:20) Зачем так усложнять, если есть USB? Забудьте про USB в индустриальной среде. Первое, что пришлось заменить при испытаниях на ЭМС - ноутбук с USB-485 на классический железный СОМ-порт на материнской плате PC. USB порт просто отваливался напрочь. По теме - вообще непонятно, о чем речь. Цель, задачи. Действительно, конь в вакууме. А портят заготовку и инструмент, как правило, не внешние контроллеры, а Васи, которые вместо того, чтобы к станку за несколько лямов купить ещё САПР за столько же, колхозят программу на листочке в клеточку и забивают с пульта.
--------------------
Программирование делится на системное и бессистемное. ©Моё :)
— а для кого-то БГ — это Bill Gilbert =)
|
|
|
|
|
|
|
|
Feb 3 2017, 14:31
|
Знающий
Группа: Свой
Сообщений: 608
Регистрация: 10-07-09
Из: Дубна, Московская область
Пользователь №: 51 111
|
Цитата(Леонид Григорьевич @ Feb 3 2017, 03:00) Физика стала точной наукой когда взяла в руки весы.
... Как бы там ни было, при равномерной подаче импульсов расстояние между ними на экране осцилографа всегда будет одинаковым. Вы тут путаете. равномерно отображаемые осциллографом импульсы это еще не факт равномерного же поворота ротора двигателя. Несколько лет назад, делая автоматизацию перемещения каретки, я убедился в этом весьма быстро. И продолжалось это безобразие до тех пор, пока не вылизал составные направляющие по которым двигалась каретка, не выбрал все люфты (как раз протяжкой с одной стороны). Так что любой возникший люфт или негладкий стык могут привести к тому, что осциллограф покажет "Гут", а исполнительное устройство отработает не в соответствии с расчетом в идеальном пространстве.
|
|
|
|
|
|
|
|
Feb 3 2017, 15:30
|
Знающий
Группа: Участник
Сообщений: 825
Регистрация: 16-04-15
Из: КЧР, Нижний Архыз
Пользователь №: 86 250
|
Цитата(MrYuran @ Feb 3 2017, 09:40) Забудьте про USB в индустриальной среде. ОК, заменяем USB на ethernet, благо полным-полно микроконтроллеров, отлично с ним работающих! Но не параллельный порт же!
|
|
|
|
|
|
|
|
Feb 3 2017, 15:47
|
Гуру
Группа: Свой
Сообщений: 5 228
Регистрация: 3-07-08
Из: Омск
Пользователь №: 38 713
|
Цитата(MrYuran @ Feb 1 2017, 16:23) LPT окончательно умер 10 лет назад, 232 готовится следом.
Нет никакого смысла гальванизировать.
Ещё через несколько лет отомрут последние динозавры, и встретить LPT можно будет только в музее. Берём CY7C68013A заливаем в неё прошивку и получаем любого из динозавров хоть LPT хоть IDE хоть .... Со своим API конечно. Цитата(Эдди @ Feb 3 2017, 17:30) ОК, заменяем USB на ethernet, благо полным-полно микроконтроллеров, отлично с ним работающих! Лучше тогда уж RS-485 или CAN если думать о помехоустойчивости. А может даже что-нить wireless.
|
|
|
|
|
|
|
|
Feb 4 2017, 21:56
|
Местный
Группа: Участник
Сообщений: 356
Регистрация: 24-02-09
Пользователь №: 45 309
|
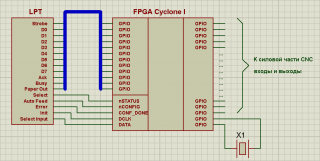
Компромиссное предложение, между прямым управлением через LPT или управлением через микроконтроллер + какой-либо из интерфейсов. Предложение такое: LPT + FPGA. 5 проводков LPT порта для первоначальной загрузки прошивки FPGA, а остальные - для обмена данными с схемой контроля шаговиков, собранной внутри этой самой FPGA. К FPGA приделать собственный кварц, для внутреннего тактирования всех времянок. На пины общего назначения, связанные с LPT, вывести любой удобный для себя интерфейс, для опроса текущего состояния. Добавить туда сигнал экстренной остановки, и т.д. В схеме внутри FPGA сформировать примитивы резки: прямых на заданное число шагов, резку по загруженному в SRAM шаблону, и т.п. Касательно памяти для шаблона. Например, даже в самой "слабенькой" FPGA серии Cyclone I, EP1C3T100 - есть 6144 байт SRAM для данных. Чем "сильнее" микросхема, тем в ней SRAM объёмнее. FPGA позволит управлять шаговиками в реальном времени, с опорой на нормальный тактовый сигнал. И при этом рапортовать о состоянии процесса управления без малейших задержек. Также FPGA можно сколько угодно раз загружать новыми конфигурациями внутренней схемы, для разных вариантов управления.
Сообщение отредактировал controller_m30 - Feb 4 2017, 22:22
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Feb 5 2017, 15:32
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Это и есть то, что нужно было. Где можно достать эту систему? В развитие темы: было предложение через PCI - E вывести сигнал на контроллеры (сервоприводы, концевики и т.д.) и втыкать их в систему неограниченное количество. Картина получается примерно такая: дешёвый контроллер работает на частоте 16 МГц. Частота шины должна составлять 1/16 = 1 МГц. Оптимальный вариант использования шины: Сигнал делится по 10 байт (80 бит). Первый байт - стартовый (11111111) для синхронизации всех устройств в системе. Далее следует 3 байта для управления шаговыми двигателями и сервоприводами сигналами "шаг вперед - шаг назад", по 2 бита на 1 двигатель. Таким образом, 12 двигателей управляются в режиме реального времени, без дополнительных переключений между осями. Далее следует 1 бит для запроса прерывания ведомым устройством, 15 бит адреса, 14 бит данных и 18 бит пауза для обратной связи.  
|
|
|
|
|
|
|
|
Feb 5 2017, 15:58
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Без кварца здесь конечно тоже не обойдётся, но он и так стоит в любом устройстве, работающем с последовательной шиной. Хотя, изначально шина PCI или PCI-E обладает какой-то частотой. Её не кварцем получают? Может быть там синхро-импульс с мать. платы проходит?
Ответ чем не устраивает...
Будем пробовать. Пока есть сомнения, что это будет работать, в частности в нарезании резьбы.
Мне больше симпатизирует вариант без внешнего контроллера с буферизацией, что бы система работала в режиме реального времени. А то что там винда на ней крутитца или линукс - там процессор с 4 ядрами по 4 ГГц. Не дорогой, от AMD.
Сообщение отредактировал Леонид Григорьевич - Feb 5 2017, 16:00
|
|
|
|
|
|
|
|
Feb 5 2017, 17:48
|
Местный
Группа: Участник
Сообщений: 356
Регистрация: 24-02-09
Пользователь №: 45 309
|
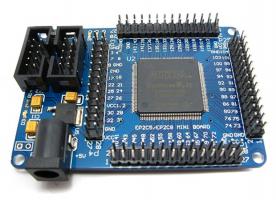
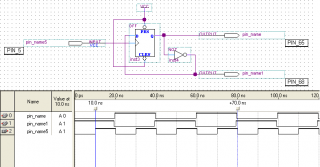
Цитата(Леонид Григорьевич @ Feb 5 2017, 18:32) Это и есть то, что нужно было. Где можно достать эту систему? Если это о моём предложении, то лучше всего - взять готовую отладочную плату, на которой установлена FPGA, и минимальная обвязка, достаточная для работы. Например вот такая, без наворотов, плата (картинка 1) - содержит всю нужную обвязку для данного применения. Есть кварц, стабилизаторы питания, разъёмы для загрузки конфигурации схемы (те что по 10 pin), и 4 "гребёнки" по 28 pin для сопряжения с внешними устройствами. Т.е. ножек, с помощью которых можно расширить LPT-порт более чем достаточно. Имеется ещё и микросхема памяти, из которой FPGA может автоматически загружать конфигурацию при включении. Для микросхем этого производителя (Altera) есть среда разработки Quartus II. Практически вся разработка может делаться только мышкой. Самый простой способ: из микросхем стандартной логики собирается схема, компилируется в файл для прошивки FPGA, загружается и испытывается. Имеется временной графический анализатор, в котором можно посмотреть временные диаграммы работы схемы. Т.е. что будет на выходе и с какими задержками, в зависимости от того что подаётся на вход. На второй картинке, триггер типа 555ТМ2 (74HC74), а ниже - временная диаграмма работы этой схемы, с точностью до 10 ns. На вход подан меандр, а на выходах будет получен вот такой сигнал. Можно и что-то гораздо более навороченное анализировать, и смотреть как оно себя ведёт в зависимости от входных сигналов. PS. Данная конкретная платка называется " ALTERA FPGA CycloneII EP2C5T144 Mini Development Board". Продаётся и на AliExpress, и в местных инет-магазинах тоже.
Сообщение отредактировал controller_m30 - Feb 5 2017, 18:44
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Feb 5 2017, 22:07
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
По всем параметрам это то, что я хотел; с ячейками и можно подключить по LPT.
https://m.habrahabr.ru/post/274829/
По поводу всей критики - принимается если станок будет в реальном времени работать и резьбу резать. Хоть по Blutus.
|
|
|
|
|
|
|
|
Feb 6 2017, 08:30
|
Участник
Группа: Участник
Сообщений: 27
Регистрация: 5-05-10
Из: Гомель, Беларусь
Пользователь №: 57 090
|
Это для себя/хобби, или попытка в серию поставить? Т.к. готовых красивых решений уже масса, и конкурировать с ними будет не просто... В частности есть куча плат MESA для LinuxCNC, в частности у меня отлично работает MESA 7i92 - интерфейс ethernet, соответственно гальванически отвязана от ПК, кабель любой разумной длины и нет проблем с помехами, есть варианты и PCI и PCI-E. Для Mach тоже куча всего есть... Даже если хочется делать свое - посмотрите как сделано у них.
А от LPT все потихоньку уходят, т.к. там и джиттер при генерации шагов, из-за отсутствия реалтайма нормального, и низкая частота шагов и т.д. и т.п.
|
|
|
|
|
|
|
|
Feb 6 2017, 14:10
|
Знающий
Группа: Свой
Сообщений: 608
Регистрация: 10-07-09
Из: Дубна, Московская область
Пользователь №: 51 111
|
Цитата(AndyBig @ Feb 6 2017, 12:49) И генерация шагов силами компьютера - тоже тупиковый путь. Автор непоколебим Цитата(AndyBig @ Feb 6 2017, 12:49) Тогда и контроллер получится сравнительно несложным и недорогим, и можно будет уйти от всех недостатков софтовой генерации шагов. Разработка своего контроллера на ПЛИС с обменом с ПК и прочими примудростями займет не меньше полугода-года. Не знаю есть ли у ТС такое время и столько запала..
|
|
|
|
|
|
|
|
Feb 6 2017, 17:54
|

Иногдящий
Группа: Свой
Сообщений: 691
Регистрация: 28-02-05
Пользователь №: 2 931
|
Цитата(Александр77 @ Feb 6 2017, 17:10) Разработка своего контроллера на ПЛИС с обменом с ПК и прочими примудростями займет не меньше полугода-года. Не знаю есть ли у ТС такое время и столько запала.. Обмен с ПК и прочие высокоуровневые вещи можно сделать на микроконтроллере. Можно и генерацию шагов сделать на нем же, хотя гораздо более эффективным будет отдать эту задачу ПЛИС, с этим согласен За PCI-E он же вроде почти готов взяться, а там проблем, мне кажется, будет побольше При том, что проблема LPT никуда не уходят - все та же непредсказуемость во временных интервалах между порциями вывода, все-таки ни Windows ни Linux не являются ОСРВ. А шаговики очень не любят неравномерность между шагами, и реагируют на нее весьма нервно - от повышенной шумности вплоть до полного срыва вращения
|
|
|
|
|
|
|
|
Feb 6 2017, 19:44
|
Знающий
Группа: Свой
Сообщений: 608
Регистрация: 10-07-09
Из: Дубна, Московская область
Пользователь №: 51 111
|
Цитата(AndyBig @ Feb 6 2017, 20:54) Обмен с ПК и прочие высокоуровневые вещи можно сделать на микроконтроллере. Можно и генерацию шагов сделать на нем же, хотя гораздо более эффективным будет отдать эту задачу ПЛИС, с этим согласен Ну тот же UART давно реализуем в рамках ПЛИС без использования всяких софтовых контроллеров. Цитата(AndyBig @ Feb 6 2017, 20:54) За PCI-E он же вроде почти готов взяться, а там проблем, мне кажется, будет побольше За любой интерфейс люди готовы ухватиться, если им скажут что он - спасительная нить. А отсутствие опыта, помноженное на непонимание сложностей в реализации задачи приведет к ложному ощущению простоты с итогом "я послушался советов от вас и теперь имею кучу проблем, в то время как вы спокойно спите".
|
|
|
|
|
|
|
|
Feb 6 2017, 20:27
|
Иногдящий
Группа: Свой
Сообщений: 691
Регистрация: 28-02-05
Пользователь №: 2 931
|
Цитата(Александр77 @ Feb 6 2017, 22:44) Ну тот же UART давно реализуем в рамках ПЛИС без использования всяких софтовых контроллеров. Да я не спорю, в рамках ПЛИС реализуется практически любой интерфейс, но разбираться с протокольной частью проще все-же контроллером Цитата(Александр77 @ Feb 6 2017, 22:44) отсутствие опыта, помноженное на непонимание сложностей в реализации задачи Это в данном случае и есть главная проблема Тут только по верхнему софту задача далеко не на пару недель.
|
|
|
|
|
|
|
|
Feb 7 2017, 18:40
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Новая тема называется "Управление станком по шине PCI"
Вводные: мы имеем платформу 4 ядра по 4 ГГц AMD.
Компьютер моделирует процесс работы станка в соответствии с программой, в G-кодах. Для каждой из задействованных в работе осей высчитывается положение, с частотой 1 МГц, ни больше ни меньше.
На плате имеется выход ШИМ для 20 Н-мостов и последовательная шина, совместимая с rs485, а также входы на 10 TTL датчиков. На шаговый двигатель ставится датчик обратной связи TTL. Обмотки управляются через 2 Н-моста. По последовательной шине идёт зацикленный сигнал с частотой 1 МГц следующего вида: стартовый байт 11111111, два байта адреса, два байта данных, 4 бит пауза - резерв для запроса прерывания ведомым устройством, два байта обратной связи, 4 бит пауза, затем по кругу.
Цена вопроса полсотни тысяч рублей. sayt1000@ya.ru
|
|
|
|
|
|
|
|
Feb 7 2017, 19:34
|
Местный
Группа: Участник
Сообщений: 356
Регистрация: 24-02-09
Пользователь №: 45 309
|
Цитата(Леонид Григорьевич @ Feb 7 2017, 21:40) Новая тема называется "Управление станком по шине PCI" Хм. Но там тоже нужна FPGA  По другому к той шине не подключиться (насколько мне известно). Только затраты на такое применение FPGA будут ещё бОльшие. А чем вариант с LPT вдруг не понравился? Мне кажется, там можно рулить движками с большой точностью. Или нужна совместимость с программами типа Mach 3 и т.д.?
|
|
|
|
|
|
|
|
Feb 7 2017, 19:47
|
Знающий
Группа: Свой
Сообщений: 608
Регистрация: 10-07-09
Из: Дубна, Московская область
Пользователь №: 51 111
|
Цитата(controller_m30 @ Feb 7 2017, 22:34) Хм. Но там тоже нужна FPGA По другому к той шине не подключиться (насколько мне известно). Только затраты на такое применение FPGA будут ещё бОльшие. Есть и DSP с шиной и мосты отдельно. Цитата(controller_m30 @ Feb 7 2017, 22:34) А чем вариант с LPT вдруг не понравился? Мне кажется, там можно рулить движками с большой точностью.
Или нужна совместимость с программами типа Mach 3 и т.д.? Да дело не в том какой порт взять. Заводит "наивность" : возьмем и будемуправлять из ПК без всяких причиндал и будет вселенское счастье. ТС возжелал практически в реальном времени управлять работой станка из ПК, не учитывая что интерфейсы (RS232, LPT, да и тот же PCI-e) работают под управлением операционки, а в ней еще крутится его эфемерная программка. Рулить с большой точностью, можно, но не всегда в реальном масштабе времени. И опять же, есть подозрение, что у ТС в качестве исполнительного узла шаговый мотор (или группа) не охваченный(ные) обратной связью. Вот он и делает "четкий" формирователь управления с наблюдением на экране осциллографа, вместо того что бы отладить "механику" и имеющийся блок внешнего управления.
|
|
|
|
|
|
|
|
Feb 7 2017, 20:19
|
Местный
Группа: Участник
Сообщений: 356
Регистрация: 24-02-09
Пользователь №: 45 309
|
У меня уточняющий вопрос к автору темы. Вот есть станок, там есть механика и шаговые двигатели в N-ом количестве. А драйвера к этим двигателям есть? Блок питания, который обеспечивает энергией все эти движки? Или предполагается разработка вообще всей электрической части: БП, драйверов шаговых движков, точных концевых, сопряжение с компьютером, и в итоге программы на комп? Я например полагал, что шаговики уже укомплектованы драйверами и блоками питания для них. Что автор может через LPT хотя бы зажечь светодиод - из какой-нить тестовой программки (к примеру на Visual Basic). Возможно даже через LPT, в тестовом режиме, был включен\выключен хотя бы один движок. И на основании подобного успешного опыта было принято решение использовать LPT. А как на самом деле? 
|
|
|
|
|
|
|
|
Feb 7 2017, 21:13
|
Знающий
Группа: Свой
Сообщений: 608
Регистрация: 10-07-09
Из: Дубна, Московская область
Пользователь №: 51 111
|
Цитата(controller_m30 @ Feb 7 2017, 23:19) А как на самом деле? Подозреваю что драйвера и источники есть. И даже некий контроллер, который управляет есть. С программкой для управления - беда. Будь исходники на контроллер - наверное решили бы в них поковыряться (что более правильно).
|
|
|
|
|
|
|
|
Feb 7 2017, 21:22
|
Местный
Группа: Участник
Сообщений: 356
Регистрация: 24-02-09
Пользователь №: 45 309
|
Цитата(Александр77 @ Feb 7 2017, 22:47) И опять же, есть подозрение, что у ТС в качестве исполнительного узла шаговый мотор (или группа) не охваченный(ные) обратной связью. Вот он и делает "четкий" формирователь управления с наблюдением на экране осциллографа, вместо того что бы отладить "механику" и имеющийся блок внешнего управления. Мне это тоже не совсем понятно. Вот есть задача резать резьбу. Если всё управляется шаговыми двигателями, то вероятно замысел такой: один движок вращает заготовку, а другой в это время двигает суппорт с резцом, нарезая резьбу... Но при этом могут быть разные ситуации! Движок вращающий заготовку может "забуксовать", пропустить несколько шагов из-за нагрузки создаваемой резцом... Или "суппорт" может пропустить свои шаги из-за нагрузки. Могут пробуксовать и оба двигателя. Как избежать пропуска шагов под нагрузкой? Добавлять понижающую передачу, наверное. А какая тогда будет скорость резки, если движок даже напрямую, не может больше 6 оборотов в секунду выдать (если 100 импульсов на оборот)?
Сообщение отредактировал controller_m30 - Feb 7 2017, 21:25
|
|
|
|
|
|
|
|
Feb 8 2017, 11:25
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Леонид Григорьевич @ Feb 7 2017, 20:40) Новая тема называется "Управление станком по шине PCI"
Вводные: мы имеем платформу 4 ядра по 4 ГГц AMD.
Компьютер моделирует процесс работы станка в соответствии с программой, в G-кодах. Для каждой из задействованных в работе осей высчитывается положение, с частотой 1 МГц, ни больше ни меньше.
На плате имеется выход ШИМ для 20 Н-мостов и последовательная шина, совместимая с rs485, а также входы на 10 TTL датчиков. На шаговый двигатель ставится датчик обратной связи TTL. Обмотки управляются через 2 Н-моста. По последовательной шине идёт зацикленный сигнал с частотой 1 МГц следующего вида: стартовый байт 11111111, два байта адреса, два байта данных, 4 бит пауза - резерв для запроса прерывания ведомым устройством, два байта обратной связи, 4 бит пауза, затем по кругу.
Цена вопроса полсотни тысяч рублей. sayt1000@ya.ru Я бы предложил сделать скромно, но со вкусом. Сделать несколько одинаковых плат с драйверми моторов. На чипах MK58 от NXP. Каждая плата работает с однм мотором и всеми типами энкодеров и конечников при нем. Платы вроде таких -
На тех же платах поставить чипы EtherCAT от Beckhoff Таким образом все платы соединяются в жестком реалтайме по шине EtherCAT. А мастер шины сделать на индустриальном BeagleBone Black Industrial c Add-On платой на том же ET1100. Соединение мастера с компьютером через HS USB На первых порах можно вместо EterCAT использовать CAN. Он, кстати, есть на показаной выше плате и USB HS есть.
|
|
|
|
|
|
|
|
Feb 8 2017, 19:53
|
Иногдящий
Группа: Свой
Сообщений: 691
Регистрация: 28-02-05
Пользователь №: 2 931
|
Цитата(Леонид Григорьевич @ Feb 7 2017, 21:40) Новая тема называется "Управление станком по шине PCI"
Вводные: мы имеем платформу 4 ядра по 4 ГГц AMD.
Компьютер моделирует процесс работы станка в соответствии с программой, в G-кодах. Для каждой из задействованных в работе осей высчитывается положение, с частотой 1 МГц, ни больше ни меньше.
На плате имеется выход ШИМ для 20 Н-мостов и последовательная шина, совместимая с rs485, а также входы на 10 TTL датчиков. На шаговый двигатель ставится датчик обратной связи TTL. Обмотки управляются через 2 Н-моста. По последовательной шине идёт зацикленный сигнал с частотой 1 МГц следующего вида: стартовый байт 11111111, два байта адреса, два байта данных, 4 бит пауза - резерв для запроса прерывания ведомым устройством, два байта обратной связи, 4 бит пауза, затем по кругу.
Цена вопроса полсотни тысяч рублей. sayt1000@ya.ru То есть дополнительно к управляющему софту и плате PCI добавляются еще и самопальные драйвера? И все за полтинник? Серьезно?  ЗЫ: Не буду спрашивать какому станку нужно столько шаговых двигателей Автор действительно очень наивен. Цитата(controller_m30 @ Feb 7 2017, 22:34) А чем вариант с LPT вдруг не понравился? Мне кажется, там можно рулить движками с большой точностью. Нельзя, к сожалению. Вернее, можно, но для этого нужна RTOS, коей ни винда ни линукс не являются. У меня буквально на днях управление станком по LPT (под виндой) начало прерываться на какие-то миллисекунды раз в 15-40 секунд, что-то в системе начало периодически занимать ресурсы в эти моменты. Восстановление системы до состояния недельной давности помогло. А в прошлый раз, когда комп начал так выделываться, восстановление системы не помогло, пришлось полностью переустанавливать винду Хорошо, что я за несколько дней до этого заказал-таки внешний контроллер, подключаемый по Ethernet, ему затыки операционки и до 0.5 сек не страшны Вчера получил, подключил - доволен как слон. Цитата(Эдди @ Feb 8 2017, 00:24) Единственный вариант, позволяющий избежать пропуска шагов — обратная связь. Без хотя бы инкрементального энкодера придется очень часто выполнять операции координатной инициализации. Цитата(AlexandrY @ Feb 8 2017, 14:25) Я бы предложил сделать скромно, но со вкусом.
Сделать несколько одинаковых плат с драйверми моторов. На чипах MK58 от NXP. Каждая плата работает с однм мотором и всеми типами энкодеров и конечников при нем. Энкодеры нужны очень хорошие. В промышленных сервомоторах на станках ставят энкодеры на несколько тысяч/десятков тысяч линий на оборот. Другой используемый в станках вариант контроля - измерительные линейки непосредственно на осях, попросту линейные энкодеры с разрешением в единицы-десятки микрон. И тут мы опять приходим к тому, что все уже придумано до нас - есть и сервокомплекты (драйвер плюс двигатель) с высокоточными энкодерами, которые сами внутри себя следят за правильностью перемещений, есть и контроллеры движений, к которым можно подключать линейки на осях ТС действительно наивен. Один только качественный алгоритм управления шаговым двигателем съест не один месяц упорного труда и не один авторский бюджет.
|
|
|
|
|
|
|
|
Feb 8 2017, 21:02
|
Иногдящий
Группа: Свой
Сообщений: 691
Регистрация: 28-02-05
Пользователь №: 2 931
|
Цитата(AlexandrY @ Feb 8 2017, 23:19) Шаговые то зачем? Нынче кругом BLDC. Вон тот движок на моей фотке дает 1800 импульсов на оборот. Без всяких энкодеров. Они банально дешевле и проще в управлении и настройке, а обратная связь по положению не везде требуется. Ну и ТС на них настаивает Современные сервоприводы - да, почти все на бесколлекторниках, имеют несколько преимуществ и один большой недостаток - цена Кстати, а какое усилие удержания на валу у движка с Вашей фотки? Цитата(AlexandrY @ Feb 8 2017, 23:19) Качественный алгоритм нынче в матлабе делается за спасибо.
Технологии знаете ли меняются. Вы лучше объясните это китайцам. А то они отстают от технологий, похоже, - только одна их контора делает приличные драйвера для ШД. Видимо, никто больше в Китае не владеет матлабом, или не хочет говорить спасибо тому кто им владеет
|
|
|
|
|
|
|
|
Feb 8 2017, 21:24
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(AndyBig @ Feb 8 2017, 23:02) Кстати, а какое усилие удержания на валу у движка с Вашей фотки? Вы лучше объясните это китайцам. А то они отстают от технологий, похоже, - только одна их контора делает приличные драйвера для ШД. Видимо, никто больше в Китае не владеет матлабом, или не хочет говорить спасибо тому кто им владеет 50 кг/см в статике. Стоит 60$. Поставляется с контроллером встроенным внутрь. Без контроллера 40$. Неужто мы проглядели шаговые с таким моментом и более дешевые. Насчет алгоритма не понял. Я имел в виду оптимальный алгоритм управления типа PID, PIDF, 2DOF PID и прочие. Они настраиваются по объекту, китайцы как бы ни при чём.
|
|
|
|
|
|
|
|
Feb 9 2017, 12:54
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Можно подробнее про двигатель BLDC и 1800 импульсов за 60 баксов? Шаровые двигатели выбраны по 3-м причинам. 1. Не нужно выдирать двигатель из дрели, потом приделывать его к станку, потом проделывать к нему датчик. Вопрос времени. 2. Высокий крутящий момент. 3. Ниже цена по сравнению с бесколлекторными двигателями. В 3-5 раз дешевле. 4. Есть посадочное место под датчик. Идея управления станком в реальном времени обусловлена тем что: 1. Каждый отдельный драйвер стоит кучку денег. 2. Станок управляетсяется как единое целое. При стопоре одной оси остальные оси тоже останавливаются. Шаговые двигатели планируется управлять в серво-режиме, с датчиком на 1000 имп. На главный привод - коллекторный двигатель с датчиком или асинхронник с датчиком и частотником. Сделать по отдельной плате на каждую ось тоже можно, но подключаться они должны к мастер- плате, последняя- в PCI или PCI-E. Главное чтобы это все работало синхронно, с одной платы и в одном процессе. От шагов можно вообще отказаться. Передавать на привод текущее положение с частотой 1КГц и моментальную скорость. Работать будет плавнее. С шагами получается двойное вычисление, сначала по положению нужно вычислить шаги, потом в контроллере по полученным шагам вычислять требуемое положение и моментальную скорость. Со стоимостью могу продвинуться
|
|
|
|
|
|
|
|
Feb 9 2017, 14:10
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Как вариант можно попробовать отдельные платы подключать по USB 3.0 С алгоритмом работы примерно следующее: есть окно программы, удивительно похожее на NC Drive. В это окно загружается текстовый файл с командами в G-кодах (отступление: для каждой оси заранее установлены параметры: количество шагов на количество миллиметров, скорость в ускоренном перемещении, ускорение и замедление в ускоренном режиме). С запуском программы начинается процесс эмуляции работы станка. A, B M4 S1000 (шпиндель и противопоставленный шпиндель вращение на себя, 1000 об/мин G0 X20.00 Z1,Z2 1.00 (ускоренное перемещение в точку x 20 мм z 1 мм.) G1 X19.50 F0.1 (подход в точку x 19,5 мм, подача 0,1 мм на оборот). G31 Z1,Z2-10.00 F2.00 (проход нарезания резьбы со стартом с нулевой меткой шпинделя) G1 Z1,Z2 -14.00 X 22.00 (сбег резьбы) G0 X100.00 (отход по оси X) A,B M5 (остановка шпинделя и противошпин.) B M11 (разжать цангу в шпинделе  G0 Z2 200.00 % Соответственно, с определённым шагом времени (1 мкс) вычисляется положение всех задействованных осей и моментальная скорость. Положение осей и скорость сравнивается с реальным. Происходит согласование по осям, увеличивается ширина ШИМ, ток на обмотках. При достижении предельного тока, большого рассогласования, происходит остановка по остальным осям.
|
|
|
|
|
|
|
|
Feb 9 2017, 15:25
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Леонид Григорьевич @ Feb 9 2017, 14:54) Можно подробнее про двигатель BLDC и 1800 импульсов за 60 баксов?
Шаровые двигатели выбраны по 3-м причинам. Обычный китайский ширпотреб. Около 100 об/мин на выходе. Планетарный редуктор. Внутри 3-и датчика холла и 4-х полюсный магнит. Процессор все сигналы холов складывает по модулю 2. Так и получается около 1800 пульсов на оборот. Плата драйвер на фотке стоит копейки и потянет BLDC мотор до киловата без усилий. CAN который у него есть способен с частотой 1 Кгц обслуживать 6-ь и больше таких же плат-драйверов. Естественно при сбое хоть в одном драйвере происходит останов всей системы за 1 мс.
|
|
|
|
|
|
|
|
Feb 9 2017, 17:19
|
Гуру
Группа: Свой
Сообщений: 2 563
Регистрация: 8-04-05
Из: Nsk
Пользователь №: 3 954
|
Цитата(AlexandrY @ Feb 9 2017, 04:24) 50 кг/см в статике. Стоит 60$. Поставляется с контроллером встроенным внутрь.
Без контроллера 40$. ссылку бы или название хотя бы. Цитата(AlexandrY @ Feb 9 2017, 04:24) Неужто мы проглядели шаговые с таким моментом и более дешевые. http://www.omc-stepperonline.com/geared-st...motors-c-4.htmlдля таких размеров всё равно редуктор максимальный момент определяет, а не двигатель. bldc или шаговик особой разницы нет.
|
|
|
|
|
|
|
|
Feb 9 2017, 19:41
|
Местный
Группа: Участник
Сообщений: 201
Регистрация: 28-07-16
Пользователь №: 92 747
|
Цитата(Леонид Григорьевич @ Feb 9 2017, 14:10) G31 Z1,Z2-10.00 F2.00 (проход нарезания резьбы со стартом с нулевой меткой шпинделя) В этой программе резьба нарезается за один проход? https://www.youtube.com/watch?v=0q_q53wsyHUИли я чего не понял?
--------------------
"Классики марксизма говорили, что общественно-экономическая формация меняется с изменением средств производства, которые всегда принадлежали имущему классу.
И сейчас мы находимся в системе координат капитализма, когда самые передовые средства производства принадлежат уже не капиталистам.
Люди, у которых нет обуви, имеют гаджеты. Сейчас создана такая информационная паутина, что вместо коллективного бессознательного можно говорить о коллективном сознании.
Если иметь мозги и гаджеты, можно перевернуть весь мир. Коллективное сознание будет управлять миром! Это исторический путь, который нельзя миновать."
Вячеслав Мальцев
|
|
|
|
|
|
|
|
Feb 9 2017, 20:12
|
Гуру
Группа: Свой
Сообщений: 2 724
Регистрация: 14-05-07
Из: Ярославль, Россия
Пользователь №: 27 702
|
Цитата(Леонид Григорьевич @ Feb 9 2017, 17:10) с командами в G-кодах (отступление: для каждой оси заранее установлены параметры: количество шагов на количество миллиметров, скорость в ускоренном перемещении, ускорение и замедление в ускоренном режиме). Можно начать с GRBL. Осей и датчиков там не неограничено, но как идею для правильного начала советовал бы рассмотреть. У меня есть маленький ЧПУ-станок, написал на perl программу генерации G-кода для нарезания резьбы - прекрасно режет.
|
|
|
|
|
|
|
|
Feb 10 2017, 12:31
|
Гуру
Группа: Свой
Сообщений: 2 563
Регистрация: 8-04-05
Из: Nsk
Пользователь №: 3 954
|
Цитата(AlexandrY @ Feb 10 2017, 04:23) Посмотрел и вижу, что шаговый с аналогичным моментом раза в два будет дороже. хоть какую-нибудь ссылку на свой BLDC привели бы. Н*м в кг*см точно правильно переведены? Цитата(AlexandrY @ Feb 10 2017, 04:23) На самом деле движок на моей фотке 50 кг/см развивает при токе в 1.5 А с встроенным китайским драйвером.
С моим внешним я даю ему ток в 15 А. Он останавливает как вкопаную 100 кг дверь так, что шестеренки хрустят. да хоть 150А, максимальный момент ограничен редуктором, а не мотором. шаговик NEMA17 c редуктором на 50: Цитата It can create a torque of 13.1Nm in theory, but due to the limitting of gear strength, it can only allow 4Nm rated torque.
|
|
|
|
|
|
|
|
Feb 10 2017, 13:00
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(_pv @ Feb 10 2017, 14:31) хоть какую-нибудь ссылку на свой BLDC привели бы. Мотор на фотке отсюда взят Там и по спец. заказу делаем. Редуктор доделываем сами частично, так что ограничения редуктора не проблема. Но шаговики однозначно слабее в том же размере и цене.
|
|
|
|
|
|
|
|
Feb 10 2017, 18:28
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Цитата(BackEnd @ Feb 10 2017, 00:41) В этой программе резьба нарезается за один проход? https://www.youtube.com/watch?v=0q_q53wsyHUИли я чего не понял? В механических станках многократное попадание в нитку обеспечивалось отмоткой системы в обратную сторону. Такой прикол, как сбег резьбы - ещё не придумали. В станках с ЧПУ многопроходное нарезание проходит без остановки шпинделя. Попадание в нитку происходит либо стартом прохода с нулевой меткой, либо применением шаго-подобных двигателей при работе под MACH. Большая просьба всем участникам этого чата написать свои контакты sayt1000@ya.ru (Уехал)
|
|
|
|
|
|
|
|
Feb 11 2017, 16:35
|

Участник
Группа: Участник
Сообщений: 45
Регистрация: 20-04-15
Из: Екатеринбург
Пользователь №: 86 304
|
Прикольно. Тема практически совпала по дате с моей идеей сделать свою ЧПУ. Наверное действительно есть какие то магнитные выбросы во вселенной
|
|
|
|
|
|
|
|
Feb 11 2017, 22:47
|
Местный
Группа: Участник
Сообщений: 201
Регистрация: 28-07-16
Пользователь №: 92 747
|
Цитата(Леонид Григорьевич @ Feb 10 2017, 18:28) В механических станках многократное попадание в нитку обеспечивалось отмоткой системы в обратную сторону. Такой прикол, как сбег резьбы - ещё не придумали. В станках с ЧПУ многопроходное нарезание проходит без остановки шпинделя. Попадание в нитку происходит либо стартом прохода с нулевой меткой, либо применением шаго-подобных двигателей при работе под MACH. Я бы сказал, что в токарно-винторезных станках попадание в нитку обеспечивается не "отмоткой", а наличием достаточно точного ходового винта, в котором вся соль. Т.к. вряд ли на токарном станке с реечной передачей на приводе продольной подачи можно отматыванием в обратную сторону точно попасть в нитку и нарезать резьбу. Но это лирика. Имелось в виду не это, а Ваш пример управляющей программы в G-кодах. То есть что там с многопроходностью и попаданием в нитку при выбранном Вами способе управления, кинематике, точности и жесткости механической части?
--------------------
"Классики марксизма говорили, что общественно-экономическая формация меняется с изменением средств производства, которые всегда принадлежали имущему классу.
И сейчас мы находимся в системе координат капитализма, когда самые передовые средства производства принадлежат уже не капиталистам.
Люди, у которых нет обуви, имеют гаджеты. Сейчас создана такая информационная паутина, что вместо коллективного бессознательного можно говорить о коллективном сознании.
Если иметь мозги и гаджеты, можно перевернуть весь мир. Коллективное сознание будет управлять миром! Это исторический путь, который нельзя миновать."
Вячеслав Мальцев
|
|
|
|
|
|
|
|
Feb 12 2017, 12:50
|
Гуру
Группа: Свой
Сообщений: 2 724
Регистрация: 14-05-07
Из: Ярославль, Россия
Пользователь №: 27 702
|
Цитата(AndyBig @ Feb 11 2017, 22:22) только вот доведенных до ума вариантов пока не видно Если не злодействовать в ТТХ, то китайский станочек вполне не плох по характеристикам и доступен по цене. Я купил с рабочим полем 240x180x45 мм + лазер 2.5 Вт с доставкой менее 21 тыр. Таможню пролетел без вопросов. На станке можно фрезеровать фанеру (пробовал 8 мм), гравировать лазером надписи, резать лазером фанеру 4 мм, гравировать печатные платы (ширина реза около 0.35 мм) и выполнять другие работы. Для начала работы с ЧПУ очень рекомендую.
|
|
|
|
|
|
|
|
Feb 17 2017, 06:12
|
Местный
Группа: Свой
Сообщений: 446
Регистрация: 12-03-06
Из: Москва
Пользователь №: 15 142
|
Цитата(adnega @ Feb 12 2017, 15:50) Я купил с рабочим полем 240x180x45 мм + лазер 2.5 Вт с доставкой менее 21 тыр.
На станке можно фрезеровать фанеру (пробовал 8 мм), гравировать лазером надписи, резать лазером фанеру 4 мм, А что еще и какой толщины лазер такой мощи режет? Пластик черный, белый толщиной 2..3мм может? С какой скоростью режет? Софт нормальный? Ссылочку не дадите на такой комплект, а то на али дороже значительно выходит.
|
|
|
|
|
|
|
|
Feb 17 2017, 09:18
|
Гуру
Группа: Свой
Сообщений: 2 724
Регистрация: 14-05-07
Из: Ярославль, Россия
Пользователь №: 27 702
|
Цитата(Andreas1 @ Feb 17 2017, 09:12) А что еще и какой толщины лазер такой мощи режет? Пластик черный, белый толщиной 2..3мм может? С какой скоростью режет? Пластик начинает гореть и плавиться. Уменьшив мощность лазера, можно нарезать канавки (лазерная гравировка). Пластики разные бывают, и не все допускают реза, даже на промышленных лазерных резаках. Пластик можно резать фрезой. Насчет скорости - у меня требований нет. Т.к. для прототипирования хватает, а для коммерческого производства нужен агрегат посерьезнее, ибо этот никогда не окупится. Обычно режу фрезой или гравирую PCB с F50, Фанеру режу лазером с F160 в 4 прохода. Быстрое перемещение около F500. Цитата(Andreas1 @ Feb 17 2017, 09:12) Софт нормальный? Бесплатный так себе, но я привык. Можно купить нормальный, но я не готов. Можно поломать, но я противник. Цитата(Andreas1 @ Feb 17 2017, 09:12) Ссылочку не дадите на такой комплект, а то на али дороже значительно выходит. На али. Кста, на 3 тыр подешевел из-за курса.
|
|
|
|
|
|
|
|
Feb 17 2017, 12:08
|
Местный
Группа: Свой
Сообщений: 446
Регистрация: 12-03-06
Из: Москва
Пользователь №: 15 142
|
Цитата(adnega @ Feb 17 2017, 12:18) Пластик начинает гореть и плавиться. Уменьшив мощность лазера, можно нарезать канавки (лазерная гравировка).
Пластики разные бывают, и не все допускают реза, даже на промышленных лазерных резаках. Спасибо за информацию, жаль, что пластик не режет, видно маловата моща. Иногда приходится на сторону отдавать на резку небольшие партии и желателен рез почти без радиусов. Цитата(adnega @ Feb 17 2017, 12:18) Бесплатный так себе, но я привык. Можно купить нормальный, но я не готов. Можно поломать, но я противник. А уже ломанного нет для не противников? Или там стандартный интерфейс и софт для других 3д фрезеров подходит.
|
|
|
|
|
|
|
|
Feb 17 2017, 15:28
|
Гуру
Группа: Свой
Сообщений: 2 724
Регистрация: 14-05-07
Из: Ярославль, Россия
Пользователь №: 27 702
|
Цитата(Andreas1 @ Feb 17 2017, 15:08) Спасибо за информацию, жаль, что пластик не режет, видно маловата моща. Иногда приходится на сторону отдавать на резку небольшие партии и желателен рез почти без радиусов. А мне рез после лазера не очень приятен. Мне ближе фреза + постобработка напильником. Больше всего смущает малый ход по Z (~45 мм). Не всякую деталь обработаешь. В основном листовой материал. Кста, если кого интересует результат работы станка, могу фоток наделать. Цитата(Andreas1 @ Feb 17 2017, 15:08) А уже ломанного нет для не противников? Или там стандартный интерфейс и софт для других 3д фрезеров подходит. Я пользуюсь этим.
|
|
|
|
|
|
|
|
Feb 17 2017, 16:18
|
Местный
Группа: Свой
Сообщений: 446
Регистрация: 12-03-06
Из: Москва
Пользователь №: 15 142
|
Цитата(adnega @ Feb 17 2017, 18:28) Больше всего смущает малый ход по Z (~45 мм). Не всякую деталь обработаешь. В основном листовой материал.
Кста, если кого интересует результат работы станка, могу фоток наделать. Интересно конечно поглядеть, уж очень дешево выходит набор. Ход конечно мал, но высокие детали редко нужно делать, в основном отверстия и пазы в готовых корпусах. А для макетов можно и послойно делать и клеить.
|
|
|
|
|
|
|
|
Apr 13 2017, 04:34
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Всем привет! Я вернулся! Дотянули трубу до зоны покрытия GSM.
Благодарю всех за публикации в теме. Лазерный гравер мне тоже нужен.
К сути вопроса:
1. Есть интерфейс CAN. По своим ресурсам он позволяет управлять одновременно 5-ю приводами с частотой 1 КГц, что уже неплохо. На этом все заканчивается.
2. В идеале нужно сделать такую вещь: плата PCI либо PCI-E с клеммником на подключение 100 витых пар. Назовём этот вариант 100%
Каждому приводу (и не только приводу) будет соответствовать свой физический разъём. Соединение по типу RS485-CAN-Свой стандарт, нужно рассмотреть все 3 варианта.
3. Финансирование работы предполагается с моим приездом к месту проведения работы и моего участия в оной.
Нужно подумать, что приобрести для начала разработки. Конечный результат скорее всего будет открытым для всех, т. е. будет выложен на моём сайте (в данный момент он не работает), со ссылкой из этой темы форума.
|
|
|
|
|
|
|
|
Apr 15 2017, 04:42
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Lpt я сам лично не смогу написать. Задача обозначена - делаем плату на PCI или PCI-E, 100 витых пар на частоте 1 МГц. Применять ноутбук не планируется, слишком суровые реали на производстве. А LPT на плате уже есть, на всякий случай.
Сейчас нужно распределить обязанности и определиться со стоимостью проведения работ. Как минимум 50 000р у меня на это есть.
|
|
|
|
|
|
|
|
Apr 15 2017, 09:18
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Советую скачать исходники LinuxCNC и оценить обьем кода. Тогда станет понятно, что в одиночку такую работу не потянуть. Если надо сразу начинать работать- то ставить на выделенный компьютер LinuxCNC, цеплять у нему контроллеры на базе карт Mesa http://www.mesanet.com/ и к ним драйверы выбранных моторов и работать. Из продуктов Mesa можно собрать набор контроллера и под PCI, и под Эзернет, притом исходники прошивок FPGA открытые, если что то не получается под стандартный набор, всегда можно переделать под свои хотелки или перекомпилировать под свою плату. Про LPT забыть как страшный сон. На самом деле любая система CNC распадается на две части - trajectory planner и motion controller. Первая часть интерпретирует G-код и готовит наборы кадров с позициями, скоростями и привязкой кадра по времени для 6 координат. Вторая часть заставляет станок двигаться по этим приготовленным координатам. Вот физически это могут быть два разных устройства, и только второе должно обеспечивать риалтайм. Попытка напихать все в одну программу и один компьютер годится только для хоббийщиков.
|
|
|
|
|
|
|
|
Apr 15 2017, 10:19
|
Гуру
Группа: Участник
Сообщений: 3 928
Регистрация: 28-03-07
Из: РФ
Пользователь №: 26 588
|
Цитата(Леонид Григорьевич @ Apr 15 2017, 05:42) Lpt я сам лично не смогу написать. я думаю, 50 рублей хватит, чтобы написать виртуальный lpt, задача непростая, но не большая по объёму Цитата(Леонид Григорьевич @ Apr 15 2017, 05:42) Задача обозначена - делаем плату на PCI или PCI-E нет в ноутах pci, можно даже сказать, что и pcmcia нет эзернет есть во всех, поэтому и нужен виртуальный lpt и да, есть ещё забавный вариант - hdmi Цитата(Леонид Григорьевич @ Apr 15 2017, 05:42) Применять ноутбук не планируется, слишком суровые реали на производстве ну купите милитари в принципе, не исключено сделать свой ноут, вопрос лишь нафига точнее, где деньги, зин Цитата(khach @ Apr 15 2017, 10:18) один компьютер годится только для хоббийщиков вы бы видели станки - палка-палка-два-конца, на которых люди деньжищи зарабатывают - не обижайте хоббийщиков
Сообщение отредактировал Огурцов - Apr 15 2017, 10:23
|
|
|
|
|
|
|
|
Apr 15 2017, 16:03
|
Гуру
Группа: Участник
Сообщений: 3 928
Регистрация: 28-03-07
Из: РФ
Пользователь №: 26 588
|
Цитата(khach @ Apr 15 2017, 13:40) заготовку за пару килобаксов это из той же оперы - жадность не важно, сколько стоит заготовка, это же заготовка, должен быть заложен процент брака а вот станок таки да, должен стоить хотя бы сотню-другую заготовок лучше тысяч Цитата(khach @ Apr 15 2017, 13:40) Про витруальный LPT забыть ка про ночной кошмар. В крайнем случае китайская USB сомневаюсь, что предлагая usb вы вообще понимаете, о чём я говорю и да, никаких usb, кроме как если для апгрейда софта
Сообщение отредактировал Огурцов - Apr 15 2017, 16:05
|
|
|
|
|
|
|
|
Apr 16 2017, 19:31
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(Огурцов @ Apr 15 2017, 18:03) это из той же оперы - жадность
не важно, сколько стоит заготовка, это же заготовка, должен быть заложен процент брака Обоснуйте Вашу мысль. Процент брака никто не закладывает, каждая запоротая заготовка- потеря в прибыли и форсмажор. Тем более что данный код успешно перед тем отработал на десятке точно таких же заготовок. И это не была авария от затупления инструмента. Цитата а вот станок таки да, должен стоить хотя бы сотню-другую заготовок
лучше тысяч Цена станка с ценой заготовки вообще не связаны никак. Определяющими является или производительность, или точность станка. Цитата сомневаюсь, что предлагая usb вы вообще понимаете, о чём я говорю
и да, никаких usb, кроме как если для апгрейда софта Я тоже на в восторге от USB, но для современных ноутбуков это часто единственное решение. Нормальное же управление по Эзернету требует выделенной сетевой карты, а если это EtherCat то и вообще специализированных адаптеров с дублированием физических интерфейсов.
|
|
|
|
|
|
|
|
Apr 16 2017, 19:57
|
Гуру
Группа: Участник
Сообщений: 3 928
Регистрация: 28-03-07
Из: РФ
Пользователь №: 26 588
|
Цитата(khach @ Apr 16 2017, 19:31) Процент брака никто не закладывает когда я учился - ещё закладывали хотя бы чтобы не искать, чью печень продавать за заготовку Цитата(khach @ Apr 16 2017, 19:31) Определяющими является или производительность можно через производительность - цена станка и цена обработанных заготовок должны быть сопоставимы т.е. глупо совать пару килобаксов в станок, сделанный из резинки от трусов Цитата(khach @ Apr 16 2017, 19:31) Я тоже на в восторге от USB, но для современных ноутбуков это часто единственное решение. не единственное, но таки usb имеет право на жизнь - где-нибудь для настольного решения, типа 3d принтера Цитата(khach @ Apr 16 2017, 19:31) Нормальное же управление по Эзернету требует выделенной сетевой карты зачем же ? парсим g-код, сливаем бинарник через эзернет на флешку, дальше спокойно в реалтайме выполняем вы же именно про это писали выше
|
|
|
|
|
|
|
|
Apr 16 2017, 23:16
|
Гуру
Группа: Участник
Сообщений: 3 928
Регистрация: 28-03-07
Из: РФ
Пользователь №: 26 588
|
и почему бы не так: Код G90();
G80();
G00(0.0000, 0.0000, 1.0000);
S(333);
M03();
G01(0.0936, -0.0037, 0.1000);
G01(-2.1915, -2.0170, 0.1000);
...
M05();
G00(-2.1915, -2.0170, 1.0000);
G00(0.0000, 0.0000, 1.0000);
M05();
M30();
Сообщение отредактировал Огурцов - Apr 16 2017, 23:19
|
|
|
|
|
|
|
|
Apr 17 2017, 06:34
|
Участник
Группа: Участник
Сообщений: 40
Регистрация: 10-10-16
Пользователь №: 93 698
|
Давайте ближе к сути вопроса: управление приводами по витой паре через PCI (PCI-E x1).
На первое время согласен поставить сразу MACH+LPT и линукс CNC + PCI плата.
Вроде не сложно накидать алгоритм программы без ограничения по количеству осей. По ходу выполнения G-кода добавляй себе по оси- две в расчёт и вычисляй их положения на ближайшие 0,2 с.
Связь цены заготовки и станка, а так же заложенный процент брака- личное дело каждого. Есть какой-то раздел экономики с ориентацией на максимальные результаты, так вот с этой точки зрения должна быть максимальная накрутка в стоимости обработки, максимальная производительность и минимальная стоимость оборудования (не в ущерб производительности и комфорта в работе). Для борьбы с браком делают изолятор брака - весь брак складывают в одну кучу и потом анализируют убытки; причины их возникновения.
А вот если станок дал сбой 1 раз - нужно что-то менять и не совать туда дорогие заготовки и пальцы. В старой винде можно отключить все лишние службы через msconfig. В новой выставляется минимальная частота процессора, в разделе электропитания. Если ничего не помогло - менять компьютер, потом ОС, в крайнем случае есть станочные стойки, начиная с НЦ31 заканчивая Siemens- Fanuk
|
|
|
|
|
|
|
|
Apr 17 2017, 09:32
|
Гуру
Группа: Участник
Сообщений: 3 928
Регистрация: 28-03-07
Из: РФ
Пользователь №: 26 588
|
Цитата(Леонид Григорьевич @ Apr 17 2017, 07:34) Давайте ближе к сути вопроса: управление приводами по витой паре через PCI (PCI-E x1).
На первое время согласен поставить сразу MACH+LPT и линукс CNC + PCI плата. форум про pci где-то выше Цитата(Леонид Григорьевич @ Apr 17 2017, 07:34) Вроде не сложно накидать алгоритм программы без ограничения по количеству осей в нашем трехмерном мире всего 6 осей если вам нужно больше, то mach и lpt вам бесполезны, вам потребуется разработать свой софт, заточенный под кинематику вашего станка
|
|
|
|
|
|
|
|
Apr 17 2017, 10:14
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(Леонид Григорьевич @ Apr 17 2017, 08:34) Давайте ближе к сути вопроса: управление приводами по витой паре через PCI (PCI-E x1). Покажите пример приводов, которые управляются по "витой паре". А то это слишком общее определение. Потому что по витой паре можно пустить тривиальный STEP/DIR с оптоизоляцией и пару концевиков в обратную сторону, По той же физической витой паре может бегать CANOpen или Ethercat ( по 4 парам) а могут быть и совсем другие варианты управления. Для этого и придумали HAL в LinuxCNC. Цитата На первое время согласен поставить сразу MACH+LPT и линукс CNC + PCI плата.
Вроде не сложно накидать алгоритм программы без ограничения по количеству осей. По ходу выполнения G-кода добавляй себе по оси- две в расчёт и вычисляй их положения на ближайшие 0,2 с. Mach имеет смысл использовать, если Вам надо фрезеровать на обычном 3 координатном станке что то плоско-выпуклое. Можно конечно разогнаться и до 6 координат, но там в маче будет бег по граблям. LinuxCNC имеет до 9 координат, но все координаты нужны разве что на проволочно- вырезном электроэрозионном станке с вращающейся осью. При независимом управлении двумя фильерами для проволоки ( по 2 координаты на фильеру и общий Z) и три-четыре угловые и пространственные координаты для столика с деталью. Для обычной мехобработки обычно хватает 4-5 координат. с запасом. Смена размерности системы координат в процессе работы требуется весьма редко, разве что для универсальны станков со сменой типа обработки "на ходу" Зы. Я бы рекомендовал ознакомиться с http://linuxcnc.org/docs/2.7/html/code/code-notes.html для понимания архитектуры системы управления станком, просмотреть реализованные драйвера харда в разделе Hardware Drivers http://linuxcnc.org/docs/2.7/html/ При более глубоком изучении там найдутся ответы на практически на все вопросы. Конечно можно иногда не соглашаться с философией управления принятой в LinuxCNC, но изучить ее желательно.
|
|
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|