| |
 Определение положения манипулятора Определение положения манипулятора |
|
|
|
|
 Mar 15 2017, 08:15 Mar 15 2017, 08:15
|
Участник

Группа: Участник
Сообщений: 15
Регистрация: 14-08-12
Пользователь №: 73 117

|
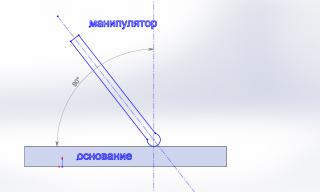
Цитата(Arthur_Sh @ Mar 15 2017, 15:02)  нет, основание жестко фиксировано.
Акселерометром я определяю угол по вертикали, тут вопросов нет. А как горизонталь считать? Компас? Один датчик на основание, второй на манипулятор
|
|
|
|
|
|
|
|
Mar 15 2017, 09:39
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(_pv @ Mar 15 2017, 11:16) 2AlexandrY: какую точность с этими тексасовскими индуктивными преобразователями получили в такой геометрии? Так нечем точность проверить, нет такой механики у меня. Но разрешение лучше 0.05 град Цитата(Arthur_Sh @ Mar 15 2017, 11:28) я не указал, манипулятор управляется двумя актуаторами. Ну вот, значит есть две оси. Можно вешать любые угловые датчики. Другое дело, что у механики всегда есть упругая деформация и при таких требованиях к точности она уже будет сильно влиять.
|
|
|
|
|
|
|
|
Mar 17 2017, 05:14
|

Знающий
Группа: Свой
Сообщений: 512
Регистрация: 17-02-09
Пользователь №: 44 983
|
Цитата(_pv @ Mar 16 2017, 18:46) очень плохая это идея угол поворота в горизонтальной плоскости гироскопом определять. даже без относительно того что никакие размеры и требуемые точности озвучены не были.
то что у вас есть люфт между акутатором и манипулятором вовсе не означает что должен быть люфт между манипулятором и измерительной системой положения актуатора. Добрый день. По вертикале угол от мин 30, макс 90град. По горизонтали от оси z +- 45град. Точность 0.1град. Смотрел, как люди использую дешевые акселерометры и гироскопы делают шлемы vr. И точность позиционирования замечательная. Я же моу позволить использовать достаточно дорогие 100$+ акселерометры и гироскопы. Так почему плохая идея? Ничего достаточно простого не установишь, поскольку манипулятор движется в 3х осях, оптические методы использовать не получится, т.к. пыль и ее довольно много.
|
|
|
|
|
|
|
|
Mar 17 2017, 11:34
|
Знающий
Группа: Участник
Сообщений: 518
Регистрация: 29-09-11
Пользователь №: 67 450
|
Цитата(Arthur_Sh @ Mar 17 2017, 15:26) Если не ошибаюсь, именно для этого делается комбинация акселерометр - гироскоп. Друг друга компенсируют. в горизонтальной плоскости толка от акселерометра никакого, от магнитного компаса в окружении электрических машин тоже толка мало. Просто для очков виртуальной реальности и игрушечного квадрокоптера - 30 градусов в час (хорошая точность для МЭМС гироскопа) достаточно, а для навигационных целей используют или привязку к абсолютным координатам (карта местности, звездная карта, GPS и т.п.) или гораздо более точные гироскопы, но там совсем другие цены и размеры. Например http://www.gyrolab.ru/product/gl-150-052-b...eskiy-gyroskop/ весит 25 кг и стоит, наверняка, не один миллион рублей.
Сообщение отредактировал novikovfb - Mar 17 2017, 11:35
|
|
|
|
|
|
|
|
Mar 17 2017, 15:10
|
Гуру
Группа: Свой
Сообщений: 2 563
Регистрация: 8-04-05
Из: Nsk
Пользователь №: 3 954
|
Цитата(Arthur_Sh @ Mar 17 2017, 11:14) Смотрел, как люди использую дешевые акселерометры и гироскопы делают шлемы vr. И точность позиционирования замечательная. Я же моу позволить использовать достаточно дорогие 100$+ акселерометры и гироскопы.
Так почему плохая идея? у шлема vr обратная связь в виде человека присутствует. а у неплохих мемс гироскопов шумы 0.01гр/с/Гц^0.5, и после интегрирования для определения угла, требуемые 0.1гр ошибки уйдут через две минуты. и пойдут накапливаться дальше. ну может найдётся гироскоп за 100$ c на порядок меньшими шумами, ну будет система начинать врать не через две минуты, а через двадцать. нельзя получить точно абсолютное значение, измеряя производную от величины, рано или поздно ошибка накопится. Цитата(Arthur_Sh @ Mar 17 2017, 11:14) Ничего достаточно простого не установишь, поскольку манипулятор движется в 3х осях, оптические методы использовать не получится, т.к. пыль и ее довольно много. ставьте магнит и датчики Холла, если пыль не магнитная.
|
|
|
|
|
|
|
|
Mar 18 2017, 08:50
|
Знающий
Группа: Свой
Сообщений: 512
Регистрация: 17-02-09
Пользователь №: 44 983
|
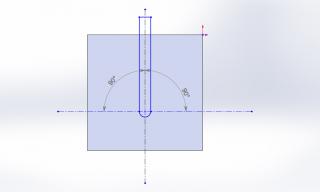
Цитата(novikovfb @ Mar 18 2017, 10:37) может не стоит изобретать велосипед, а поставить синусно-косинусный вращающийся трансформатор? Я вообще против изобретения велосипедов, однако не представляю, как этот трансформатор установить на конструкцию. В шарнир я его установить не могу, в нем большая механическая нагрузка. В движении хорошо видно, что вращение идет по разным осям. А, если я правильно помню вращ. транс. то он работает в одной оси. Если ошибаюсь - поправьте.
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
Guest_TSerg_*
|
Mar 18 2017, 18:27
|
Guests
|
Любые, доступные Вам по карману опто- , электро-механические датчики, те же упомянутые СКВТ (синусно-косинусные вращающиеся трансформаторы).
Попытка интегрирования без внешней коррекции, всегда приведет к провалу проекта (тем более в таком малом объеме), ибо интегрирование случайных процессов, даже с нулевым мат. ожиданием - дает расходящийся процесс по искомой величине.
|
|
|
|
|
|
|
|
Mar 18 2017, 20:23
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(_pv @ Mar 18 2017, 15:18) Мутные чипы, преподносят как некую инновацию, но ничего не пишут про точность. Скажем у магнитных сенсоров есть сильный гистерезис, он убивает чувствительность при малых амплитудах вращений (0.7 градуса у хороших чипов) У индуктивных сенсоров таких как я показал такого эффекта нет. Опять же этот Melexis выдает результат не быстрее чем 1 КГц, DSP у него внутри слабый, калибровка у них несерьезная. Хорошая калибровка базируется на Фурье анализе кривых при полном обороте и взятии на нём N точек. Вся инновация в том что засунули все три вектора в один чип. Ну так можно расположить ортогонально два чипа типа TLI5012 и получить те же 3-и вектора, но с 15-и битной точностью и 8 КГц сэмплированием. Цитата(Arthur_Sh @ Mar 18 2017, 18:16) Уважаемый _pv, этот датчик мне никак не поможет. Посмотрел на него. Вы б лучше нарисовали где находятся актуаторы и габариты указали, а то пока рисунки ни о чём.
|
|
|
|
|
|
|
|
Mar 20 2017, 11:09
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(_pv @ Mar 19 2017, 23:47) а можно ссылку про ферромагнитные концентраторы у датчиков мелексис, особенно у mlx90393. Так по вашей же ссылке и прочитайте. Там упоминается некий Integrated Magnetic Concentrator, который есть основа их "уникальной" технологии Triaxis. Кстати и Infineon и другие ее давно применяют. А потом погуглите и найдёте вот такое - http://www.sensorsmag.com/sensors/electric...-technology-786Цитата(Arthur_Sh @ Mar 20 2017, 07:43) Высота манипулятора 1500мм, шарниры актуаторов установлены на высоте 600мм от нижней опорной точки. Скорость перемещения низкая, примерно 1град\с по горизонтали и вертикали. А, ну можно успокоиться. Такая балка будет прогибаться и вибрировать на те самые 0.1 град.
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|