| |
 libopencm3 + stm32f4 + CAN libopencm3 + stm32f4 + CAN, CAN на забытой всеми библиотеке |
|
|
|
|
 May 29 2018, 13:21 May 29 2018, 13:21
|

Частый гость

Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250

|
Привет всем! Ребята, помогите, пожалуйста разобраться, что не так. Пытаюсь запустить CAN в нормальном режиме ( в loopback работает) на stm32f4 в среде CodeBlock на библиотеке libopencm3 (ибо именно оно и надо - хотя оч ненависто) После того, как использует все ящики - зависает. Почему данные не уходят из почтовых ящиков? Второе устройство на шине имеется. Может я не сбрасываю какой-то флаг? Или неправильно настройки? Инициализация CODE uint32_t _canConfig(uint32_t bitrate)
{
int prescaler = 0;
switch(bitrate)
{
case 500:
prescaler = 2; //500kb/s=2000ns
break;
case 250:
prescaler = 4; //250kb/s=4000ns
break;
case 125:
prescaler = 8; //125kb/s=8000ns
break;
case 100:
prescaler = 10; //100kb/s=10000ns
break;
case 50:
prescaler = 20; //50kb/s=20000ns
break;
case 20:
prescaler = 50; //20kb/s=50000ns
break;
case 10:
prescaler = 100; //10kb/s=100000ns
break;
default:
prescaler = 2; //500kb/s=2000ns
break;
}
//CANRX поставлено nopull по аналогии с халом
rcc_periph_clock_enable(CAN_RX_PERIPH);
gpio_mode_setup(CAN_RX_PORT, GPIO_MODE_INPUT, GPIO_PUPD_NONE, CAN_RX_PIN);
gpio_set(CAN_RX_PORT, CAN_RX_PIN);
//CANTX
rcc_periph_clock_enable(CAN_TX_PERIPH);
gpio_mode_setup(CAN_TX_PORT, GPIO_MODE_AF|GPIO_OSPEED_50MHZ, GPIO_OTYPE_PP, CAN_TX_PIN);
//CANmodul
rcc_periph_clock_enable(CAN_PERIPH);
nvic_enable_irq(NVIC_CAN1_RX0_IRQ);
nvic_set_priority(NVIC_CAN1_RX0_IRQ, 1);
can_reset(CAN_NUM);
if(can_init(CAN1,
false, //TTCM: Time triggered comm mode?
false, //ABOM: Automatic bus-off management?
false, //AWUM: Automatic wakeup mode?
false, //NART: No automatic retransmission?
false, //RFLM: Receive FIFO locked mode?
false, //TXFP: Transmit FIFO priority?
CAN_BTR_SJW_1TQ,
CAN_BTR_TS1_9TQ,
CAN_BTR_TS2_6TQ,
prescaler, //BRP+1: Baud rate prescaler
false, //LOOPBACK?
false) == 1) //SILENT?
{
return 1;
}
//CAN filter 0 init
can_filter_id_mask_32bit_init(
0, // Filter ID - принимать все
0, // CAN ID
0, // CAN ID mask
0, // FIFO assignment (here: FIFO0)
true); // Enable the filter
//Enable CAN RX interrupt
can_enable_irq(CAN1, CAN_IER_FMPIE0); Прерывание на получение данных мне пока не нужно, но вот Код void can1_rx0_isr(void)
{
can_fifo_release(CAN1, 0);
} и в мейне отправка по-тупому Код while (1)
{
time++;
if(time>1000000)
{
can_transmit(CAN1, 0x00, 0, 0,8, datat);
time=0;
} В чем может быть проблема? Эта libopen... такая гадость... понимаю, что кейл+куб лучше да я и не против. Но задача стоит именно на этих средствах сделать. ХЕЛП
Сообщение отредактировал IgorKossak - May 29 2018, 18:46
Причина редактирования: [codebox] для длинного кода, [code] - для короткого!
|
|
|
|
|
|
|
|
May 29 2018, 13:51
|
Частый гость
Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250
|
Цитата(RadiatoR @ May 29 2018, 14:44)  Почему RX pin устанавливается как GPIO_MODE_INPUT?
должна так же быть GPIO_MODE_AF настроено было по аналогии с халом из кейла CODE void HAL_CAN_MspInit(CAN_HandleTypeDef* hcan)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(hcan->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspInit 0 */
/* USER CODE END CAN1_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_CAN1_CLK_ENABLE();
/**CAN1 GPIO Configuration
PB8 ------> CAN1_RX
PB9 ------> CAN1_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
__HAL_AFIO_REMAP_CAN1_2();
/* Peripheral interrupt init */
HAL_NVIC_SetPriority(CAN1_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(CAN1_RX0_IRQn);
HAL_NVIC_SetPriority(CAN1_SCE_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(CAN1_SCE_IRQn);
/* USER CODE BEGIN CAN1_MspInit 1 */
/* USER CODE END CAN1_MspInit 1 */
}
}
Сообщение отредактировал IgorKossak - May 29 2018, 18:46
Причина редактирования: [codebox] для длинного кода, [code] - для короткого!
|
|
|
|
|
|
|
|
May 30 2018, 12:49
|
Частый гость
Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250
|
Цитата(Эдди @ May 29 2018, 17:50) ТС, почитайте даташит или хотя бы примеры opencm3!
Самый надежный вариант - не использовать чужие библиотеки. Только свои сниппеты, тщательно отлаженные и проверенные временем, гарантируют нормальную работу!
// тоже не понял, с чего бы вдруг стал работать CAN, если ноги не в AF! Приняты все исправления. Не помогло. Скажите, пожалуйста, а почему ящики просто инкрементруются, а кода кончаются - вываливается в ошибку. Получается, ничего не отправляется....
|
|
|
|
|
|
|
|
May 30 2018, 13:24
|
Профессионал
Группа: Свой
Сообщений: 1 123
Регистрация: 8-03-09
Из: Днепр
Пользователь №: 45 848
|
ну, и, конечно извиняюсь, проверить как проводки подсоединены (да, еще раз), какие скорости обмена, наличие терминаторов. Без этого - ну никак. При условии что ничего не пропалено, если есть трансиверы - что рабочие и правильно подключены. Цитата(Ekka @ May 29 2018, 16:21) После того, как использует все ящики - зависает. ОНО должно не зависать, а выдавать код ошибки, где и по какой причине "непонятка".
|
|
|
|
|
|
|
|
May 31 2018, 05:36
|
Частый гость
Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250
|
Цитата(k155la3 @ May 30 2018, 14:24) ну, и, конечно извиняюсь, проверить как проводки подсоединены (да, еще раз), какие скорости обмена, наличие терминаторов.
Без этого - ну никак. При условии что ничего не пропалено, если есть трансиверы - что рабочие и правильно подключены.
ОНО должно не зависать, а выдавать код ошибки, где и по какой причине "непонятка". Да ошибки выдает. EWG, EVP и BOF и в последствии еще и LEC(((
|
|
|
|
|
|
|
|
Jun 7 2018, 11:27
|
Частый гость
Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250
|
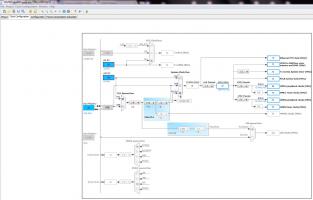
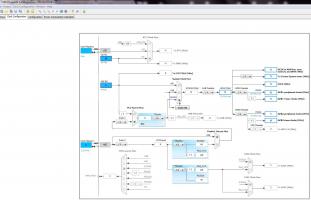
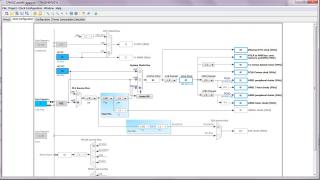
Пытаюсь настроить устройства одинаково. stm32f4 CAN настроен на 500 кбит/сек stm32f1 тоже. Ниже привожу настройки. Но почему-то, как только пытаюсь с f4 что-то отправить или получить - вылетает в ошибки. f1 себя чувствует хорошо и не выпендривается. Что я делаю не так? Настройки кана у обоих stm-к одинаковы Вылетаю в ошибку FOR, по ней читаю что-то вроде, "Некоторые части CAN-сообщения имеют одинаковое значение во всех типах сообщений. Т.е. протокол CAN точно определяет какие уровни напряжения и когда должны появляться на шине. Если формат сообщений нарушается, то узлы генерируют ошибку Form Error". Немного не въезжаю... Где и что и ПОчему формат сообщения нарушен.
Сообщение отредактировал Ekka - Jun 7 2018, 11:31
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Jun 7 2018, 13:20
|
Частый гость
Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250
|
Как можно избавиться от этой ошибки? С чем может быть такое связано? две stm32f1 нормально общаются. Стоит подключить f4 с такими же настройками, как она вылетает в ошибки. везде пишут, что это за ошибка, а как от нее отделаться не пишут(  Может я сообщение не правильно формирую...О_О Код CanTxMsgTypeDef tx;
tx.StdId = 0xFF;
tx.ExtId = 0xFF;
tx.RTR = CAN_RTR_DATA;
tx.IDE = CAN_ID_STD;
tx.DLC = 2;
tx.Data[0] = 'C';
tx.Dаta[1] = 'A';
hcan1.pTxMsg = &tx;
|
|
|
|
|
|
|
|
Jun 9 2018, 09:15
|
Частый гость
Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250
|
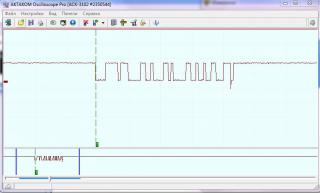
Цитата(yes @ Jun 7 2018, 15:44) если есть возможность, хорошо бы посмотреть осциллографом линию. может что-то не так с драйвером/уровнями? заодно и грубые ошибки времянки видны будут.
или соединить два CAN-а в F4 между собой...
не уверен на 100% но Form Error может быть из-за того, что старт бит не передается - то есть на входе CAN_RX всегда 1 Все время получаю такой сигнал. Настройки stm32f4 изменены. Сейчас все stm-мы настроены на 250 kbit/s
Сообщение отредактировал Ekka - Jun 9 2018, 11:27
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Jun 12 2018, 08:54
|
Частый гость
Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250
|
мда... в кейле-то оно на хале шпарит без проблем, но вот хэта жуткая libopencm3... В ней у меня так (для STM32f4) Код APB1_FREQ = 42 mHz
Prescaler (for TQ) = 24
42/24 = 1.75
1/1.75 * 1000 = 571.4 ns (Time Quantum)
Для скорости 250 kbit/s:
1/250*1000 = 4000 ns (time for One Bit)
571.4 * (1 + BS1 + BS2) = 4000
BS1+BS2 = 6 (пусть BS1 = 1, BS2 = 5)
Итого настройки CAN1 для скорости 250 Кбит/сек:
PRESC = 24
SJW = 1
BS1 = 1
BS2 = 5 Для STM32f1 (их трое, все нормально общаются) Код APB1_FREQ = 36 mHz
Prescaler (for TQ) = 12
36/12 = 3
1/3 * 1000 = 333.3 ns (Time Quantum)
Для скорости 250 kbit/s:
1/250*1000 = 4000 ns (time for One Bit)
333.3 * (1 + BS1 + BS2) = 4000
BS1+BS2 = 11 (пусть BS1 = 6, BS2 = 5)
Итого настройки CAN1 для скорости 250 Кбит/сек:
PRESC = 12
SJW = 1
BS1 = 6
BS2 = 5 Но на libopencm3 у меня просто виснет кан и ложит все остальные устройства (кроме передающего)...(((
Сообщение отредактировал Ekka - Jun 12 2018, 08:56
|
|
|
|
|
|
|
|
Jun 13 2018, 10:04
|
Профессионал
Группа: Свой
Сообщений: 1 123
Регистрация: 8-03-09
Из: Днепр
Пользователь №: 45 848
|
Цитата(Ekka @ Jun 12 2018, 09:41) Все запустилось, проблема была в том, что вывод RS на плате болтался... После его настройки все заработало. А что сделали что "не болтается" ? какой номинал R и куда ? Повторяю вопрос, терминаторы, 120 Ом, два, не шине имеются ? ---- если работать по Вашей методе, сделайте "фото" настраиваемых регистров в работающем (HAL) и неработающем проектах (после инициализации), найдите разницу. В IAR можно вывести несколько окон регистров и сделать скриншот. В другом проекте это можно не делать а сравнить с экрана. --- Если собираетесь работать с CAN, попробуйте раздобыть адапетер CAN_HACKER. Удобно мониторить-снифф шины, легко перенастраивается, отображает ошибки. Девайс и софт во многом удобнее даже фирменных утилит (по крайней мере от Kvaser).
|
|
|
|
|
|
|
|
Jun 13 2018, 12:37
|
Частый гость
Группа: Участник
Сообщений: 164
Регистрация: 12-04-16
Из: Белгород
Пользователь №: 91 250
|
Похоже, была ошибка в том, что скорость у приемника и передатчика не совпадала. Код APB1_FREQ = 42 mHz
Prescaler (for TQ) = 24
42/24 = 1.75
1/1.75 * 1000 = 571.4 ns (Time Quantum)
Для скорости 250 kbit/s:
1/250*1000 = 4000 ns (time for One Bit)
571.4 * (1 + BS1 + BS2) = 4000
BS1+BS2 = 6 (пусть BS1 = 2, BS2 = 4)
Итого настройки CAN1 для скорости 250 Кбит/сек:
PRESC = 24
SJW = 1
BS1 = 2
BS2 = 4 Как ни странно, вот с этими настройками все запустилось на libopencm3. СПАСИБО ОГРОМНОЕ ВСЕМ, кто ОТЗЫВАЛСЯ!!))))
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|