| |
|
  |
 Токовое ограничение в сервоконтроллере Токовое ограничение в сервоконтроллере |
|
|
|
|
 Feb 3 2009, 09:57 Feb 3 2009, 09:57
|
Частый гость

Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455

|
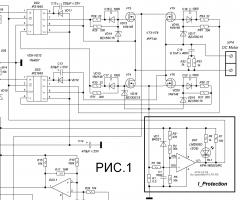
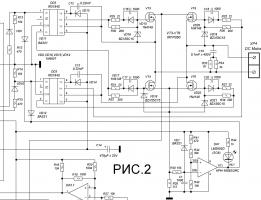
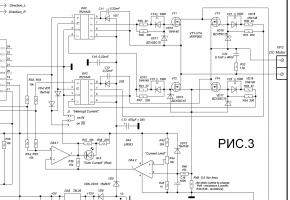
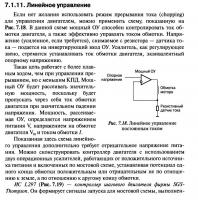
В своё время делал сервоконтроллер. И столкнулся с проблемами при токовом ограничении. http://forum.rcdesign.ru/f41/thread40981-2.htmlСначала у меня было при перегрузке прерывание тока по входу SD (IR21284) ) рис.1, при этом транзисторы при перегрузке «сильно» грелись – как я понял из-за вхождения в линейный режим и из-за того, что в момент перегрузки драйвера закрывают все транзисторы и ЭДС самоиндукции «гасится» через RC-цепочку и параллельно через внутренние диоды транзисторов и сопротивление источника питания. На диодах выделяется около 0,6В. Потом попробовал прерывание по входу (IN IR2184) рис.2 – нагрев транзисторов резко уменьшился, видимо за счёт того, что на открытых нижних транзисторах (шунтирование якоря) во время перегрузки выделяется значительно меньше напряжение. На этом сначала остановился, но не давала покоя мысль – почему у всех контроллеров, схемы которых я видел, на IR21xx прерывание тока происходит по входу SD. Попробовал как у UHU через RS-«защёлку» (рис.3), на оставшейся половинке компаратора (DA4.1) собрал аналог RS-триггера. «Взвод» триггера по превышению тока, а сброс когда на обоих входах IN будет 0. Но динамики после этого вообще никакой и мощности тоже, ток ограничения (подстроечником) по сравнения с предыдущими вариантами пришлось значительно увеличивать (пробовал и по SD и по IN – переустановка J2), но всё равно динамики не добился и вернулся к варианту с прерыванием по IN. Потом когда уже всё разобрал, почитал литературку, понял, что на вход R триггера надо подавать частоту. Только какую не знаю. Кто пишет 2 кГц, кто 200кГц. Подскажите, на будущее, т.к. скоро буду делать ещё несколько контроллеров. И ещё вопросик, какие теоретические неприятности могут возникнуть при перегрузке, с таким нестандартном вариантом, как шунтировании якоря? У меня два самодельных контроллера которые сейчас нормально работают на станке. Есть предположение, что на ресурсе щёток.
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Feb 3 2009, 10:25
|

Гуру
Группа: Свой
Сообщений: 3 615
Регистрация: 12-01-09
Из: США, Главное разведовательное управление
Пользователь №: 43 230
|
Цитата(arisov @ Feb 3 2009, 11:57)  В своё время делал сервоконтроллер. И столкнулся с проблемами при токовом ограничении. http://forum.rcdesign.ru/f41/thread40981-2.htmlСначала у меня было при перегрузке прерывание тока по входу SD (IR21284) ) рис.1, при этом транзисторы при перегрузке «сильно» грелись – как я понял из-за вхождения в линейный режим и из-за того, что в момент перегрузки драйвера закрывают все транзисторы и ЭДС самоиндукции «гасится» через RC-цепочку и параллельно через внутренние диоды транзисторов и сопротивление источника питания. На диодах выделяется около 0,6В. Случилась перегузка, операционник вырубил все. Ток упал, операционник все включил. Снова перегрузка, снова выключил, снова включил и так с хрен знает какой частотой. Разумеется транзисторы будут греться от такого безобразия. Цитата Потом попробовал прерывание по входу (IN IR2184) рис.2 – нагрев транзисторов резко уменьшился, видимо за счёт того, что на открытых нижних транзисторах (шунтирование якоря) во время перегрузки выделяется значительно меньше напряжение.
И ещё вопросик, какие теоретические неприятности могут возникнуть при перегрузке, с таким нестандартном вариантом, как шунтировании якоря? У меня два самодельных контроллера которые сейчас нормально работают на станке. Есть предположение, что на ресурсе щёток. Вы коротите электродвигатель, который в тот момент вполне может быть на полных оборотах, да еще и двигать что-то инерционное.  Да, будут гореть щётки, будут ломаться шестерни, будут гореть обмотки и транзисторы... Цитата На этом сначала остановился, но не давала покоя мысль – почему у всех контроллеров, схемы которых я видел, на IR21xx прерывание тока происходит по входу SD. Попробовал как у UHU через RS-«защёлку» (рис.3), на оставшейся половинке компаратора (DA4.1) собрал аналог RS-триггера. «Взвод» триггера по превышению тока, а сброс когда на обоих входах IN будет 0. Но динамики после этого вообще никакой и мощности тоже, ток ограничения (подстроечником) по сравнения с предыдущими вариантами пришлось значительно увеличивать (пробовал и по SD и по IN – переустановка J2), но всё равно динамики не добился и вернулся к варианту с прерыванием по IN.
Потом когда уже всё разобрал, почитал литературку, понял, что на вход R триггера надо подавать частоту. Только какую не знаю. Кто пишет 2 кГц, кто 200кГц. Подскажите, на будущее, т.к. скоро буду делать ещё несколько контроллеров. У вас же там есть какой-то контроллер. Пусть он сбрасывает сигнал "перегрузка по току". Случилась перегрузка, он все обесточил, начался "разбор полетов". Просто оставте первый вариант, но заведите сигнал ~SD еще и в контроллер, на какое-то прерывание. Хотя бы. Пусть все останавливает и ждет пока не нажмут кнопку.
|
|
|
|
|
|
|
|
Feb 3 2009, 10:35
|
Гуру
Группа: Свой
Сообщений: 3 615
Регистрация: 12-01-09
Из: США, Главное разведовательное управление
Пользователь №: 43 230
|
Цитата(arisov @ Feb 3 2009, 12:31) Слово перегрузка – не означает «заклинивание». Перегрузка возникает при старте, торможении, реверсе. И персонал через каждые несколько мили или микросекунд кнопочку не успеет нажать. Кнопочка это для режима ServoError. В таком случае, вам нужно вводить ограничение по току. Чтобы оно не "само" колбасилось, непонятно как и на непонятно какой частоте, а чтобы контроллер плавно поддерживал максимально допустимый ток, или там скорость разгона. Самым оптимальным в этом случае будет. 1. Сделать как я сказал. 2. Оставить схему 1. 3. Поставить к примеру датчик холла (тот резистор где вы снимаете ток, слишком шумный) и завести с него сигнал в контроллер. 4. Шимить соответственно.
|
|
|
|
|
|
|
|
Feb 3 2009, 10:51
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Вот схемы UHU.
Сообщение отредактировал arisov - Feb 3 2009, 10:53
|
|
|
|
|
|
|
|
Feb 3 2009, 17:26
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(Methane @ Feb 3 2009, 13:25) Случилась перегузка, операционник вырубил все. Ток упал, операционник все включил. Снова перегрузка, снова выключил, снова включил и так с хрен знает какой частотой. Разумеется транзисторы будут греться от такого безобразия. Это и называется, если не ошибаюсь – линейный режим о чём и писал. Цитата(Methane @ Feb 3 2009, 13:25) Вы коротите электродвигатель, который в тот момент вполне может быть на полных оборотах, да еще и двигать что-то инерционное. Да, будут гореть щётки, будут ломаться шестерни, будут гореть обмотки и транзисторы... На то он и сервопривод, который с начала проектирования рассчитан на долговременные резкопеременные нагрузки. В момент паузы ШИМ (20кГц) происходит тоже самое – закрытие нижних транзисторов и это считается штатным режимом. А в других контроллерах, UHU, Gecko G320, вообще в противовключении – при удержании позиции («СТОП») ШИМ=50/50, при движении соответственно скважность меняется, например 30/70. И это тоже считается нормой. В моём варианте, это как бы ШИМ по току и шунтирование происходит не постоянно, а возможно даже с частотой выше 20кГц (по моему старенькому осциллографу этот момент трудно уловить). Здесь я вижу недостаток (кстати, только сегодня об этом подумал) - основной ток замыкания ЭДС протекает только через открытые транзисторы, минуя общий токоизмерительный резистор и этот ток, если транзисторы имеют малый запас по имп. току может вывести их из строя. В этом варианте, конечно лучше применить раздельные токоизмерители. Но тогда вероятность перехода в линейный режим возможно возрастёт. Как считаете? Цитата(Methane @ Feb 3 2009, 13:25) У вас же там есть какой-то контроллер. Пусть он сбрасывает сигнал "перегрузка по току"… Быстродействие AtMega88 на 16МГц уже и так на пределе, особенно если энкодер 2000имп/об., так что нет никого желания его ещё чем то озадачивать. Вообще хочу попробовать его на 24МГц «запустить», как у UHU, хотя это и не штатный режим. Но на форумах UHU не разу не видел жалобы, что у кого-то были с этим проблемы.
|
|
|
|
|
|
|
|
Feb 3 2009, 17:35
|
Гуру
Группа: Свой
Сообщений: 3 615
Регистрация: 12-01-09
Из: США, Главное разведовательное управление
Пользователь №: 43 230
|
Цитата(arisov @ Feb 3 2009, 19:26) Это и называется, если не ошибаюсь – линейный режим о чём и писал. Вы ошибаетесь. Цитата На то он и сервопривод, который с начала проектирования рассчитан на долговременные резкопеременные нагрузки. Но средний-то ток вам нужно знать. ЧТобы хотя бы знать насколько оно нагрелось. Жуть
|
|
|
|
|
|
|
|
Feb 3 2009, 18:01
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
А про это, что скажите, не напоминает первую схему? А где жуть, для этого и существуют форумы, чтобы «вразумили», подсказали. Где я должен знать температуру. Я не претендую на сверхпретензионный, супернадёжный сервоконтроллер, мне достаточно любительского, в меру надёжного, доступного для повторения контроллера.
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Feb 3 2009, 19:32
|
Гуру
Группа: Свой
Сообщений: 3 615
Регистрация: 12-01-09
Из: США, Главное разведовательное управление
Пользователь №: 43 230
|
Цитата(arisov @ Feb 3 2009, 20:01) А про это, что скажите, не напоминает первую схему? Нет. Цитата А где жуть, для этого и существуют форумы, чтобы «вразумили», подсказали.
Где я должен знать температуру. Я не претендую на сверхпретензионный, супернадёжный сервоконтроллер, мне достаточно любительского, в меру надёжного, доступного для повторения контроллера. Ок. Постараюсь написать подробно. У любой электрической машины есть два максимальных тока. 1. Это ток номинальный. К примеру в среднем, за какой-то период времени, ток должен быть не более чем 10 Ампер. Если ток будет превышен, то двигатель перегреется итд. К примеру 9 секунд это ток 1А, и 1секунду это ток в 9А. Это нормально. Тут есть фишка. Можно интегрировать ток через двигатель и считать температуру двигателя безо всяких термодатчиков. 2. Кроме того есть ток предельный импульсный. Это ток при котором двигатель не перегреется. Он просто сломается. К примеру испарится проволка которой коллектор подключен якорю, или размагнится постоянный магнит, или подшипшик сломается, или вал погнется итд. Этот ток недопустим. Любой двигатель может работать как тормоз. Поэтому ток через двигатель ограничивать не только при старте, но и торможении. Это значит то не допустимо устраивать безобразие как у вас на рис. 2. И коротить двигатель. Я имею в виду, что может быть в каком-то конкретном случае, оно и допустимо, но в таком случае люди указывают что все норма и все нормально. По поводу сломаться. Сломать коллекторный двигатель, хотя бы на несколько сот ватт, гораздо проще чем хотелось бы. Его алихесова пята это коллектор. Фактически это куча индуктивностей, каждая из которых за один оборот двигателя разрывается, и освобождает энергию из индуктивности в виде дуги. Короче. При превышении тока выше предельного, дуга просто не успевает гаснуть и на коллекторе возникает дуга которая тянется от щетки до щетки. Если сам коллектор не расплавится, если от него не отпаяются обмотки итд, может случится и просто короткое замыкание якоря через эту дугу. Линейный режим. Есть у транзистора два режима. Это ключевой и линейный. Ключевой, это когда транзистор или открыт или закрыт. Если на затворе 0 вольт, он закрыт. Если к примеру 15 вольт, то он закрыт. В этом случае сток-исток напряжение или напряжение питания, или несколько вольт. К примеру, если у вас не большие мощности, и вы начинающий, то я бы советовал начинать именно с линейного режима. Посмотрите "усилитель мощности в режиме Б", сделайте их два, один инвертирующий, другой нет, и вы получите очень простую схему. КПД будет низкий, зато все очень просто и наглядно.
|
|
|
|
|
|
|
|
Feb 3 2009, 20:59
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Methane, большое спасибо за разъяснения. Для долговременного превышение тока у меня уже реализована защита, я её описал в соседней ветке – опишу здесь. При рассогласовании действительного положения (от энкодера) и заданного (от Step/Dir), например при наезде на препятствие, на +/-3 шага у меня в программе запускается таймер и если в течении 15 сек. это рассогласование не станет меньше +/-3шага, то контроллер переходит в режим ServoError, который можно «сбросить» только вкл/выкл. питания или в программе настройки. Если рассогласование пропадёт, то таймер «сбрасывается». В ServoError также переходит без задержки если рассогласовании позиций достигнет +/- 20 000 шагов. Так что защиты от долговременного превышения можно сделать без контроля тока микроконтроллером. И это у меня всё работает и вопросов нет. Можете посмотреть работу моего контроллера здесь http://depositfiles.com/en/files/tseutbpe8 (48.82 Mb) Дуги на коллекторе нет. И как же вы всё таки объясните, что в штатном режиме, во время движения - во время паузы ШИМ нижние транзисторы точно также открыты. И во время реверса возникают гораздо большие перегрузки, чем просто при замыкании. Сервопривод (серводвигатель), который я модернизировал 30 лет работал с электромашинным усилителем (ЭМУ) у которого выходное сопротивление очень близко к нулю и при снятии с его обмотки управления (возбуждения) напряжения или реверсе серводвигатель «гасил» всю свою энергию в якоре ЭМУ. И за 30 лет движки не разу не меняли. А разве при высоких частотах ключевой режим не может перейти в линейный? Тем более у полевиков довольна большая емкость. А транзисторы у меня вылетали. По диагонали, из-за перегрева, при вращении в одном направлении  Цитата(_Pasha @ Feb 3 2009, 23:25) Значит, резко закрывались, раз обратный диод нагрели. До диода внутри транзистора я не смог добраться, чтоб "пощупать" его нагрев Это только мои предположения.
Сообщение отредактировал arisov - Feb 3 2009, 20:49
|
|
|
|
|
|
|
|
Feb 3 2009, 21:13
|
Гуру
Группа: Свой
Сообщений: 3 615
Регистрация: 12-01-09
Из: США, Главное разведовательное управление
Пользователь №: 43 230
|
Цитата(arisov @ Feb 3 2009, 22:59) Methane, большое спасибо за разъяснения.
Для долговременного превышение тока у меня уже реализована защита, я её описал в соседней ветке – опишу здесь. При рассогласовании действительного положения (от энкодера) и заданного (от Step/Dir), например при наезде на препятствие, на +/-3 шага у меня в программе запускается таймер и если в течении 15 сек. это рассогласование не станет меньше +/-3шага, то контроллер переходит в режим ServoError, который можно «сбросить» только вкл/выкл. питания или в программе настройки. Если рассогласование пропадёт, то таймер «сбрасывается». В ServoError также переходит без задержки если рассогласовании позиций достигнет +/- 20 000 шагов. Так что защиты от долговременного превышения можно сделать без контроля тока микроконтроллером. Паршиво сделано. Не учитывает нагрузку во время этих шагов. Цитата И это у меня всё работает и вопросов нет. Можете посмотреть работу моего контроллера здесь http://depositfiles.com/en/files/tseutbpe8 (48.82 Mb) Не буду. Цитата Дуги на коллекторе нет. Вы хотите спать спокойно или нет? Цитата И как же вы всё таки объясните, что в штатном режиме, во время движения - во время паузы ШИМ нижние транзисторы точно также открыты. И во время реверса возникают гораздо большие перегрузки, чем просто при замыкании. Главное - контролировать ток. Для двигателя - главное именно ток. Он определяет момент. Вы ток, когда два нижних открыты не контролируете. А сталобыть если механика создаст приличную мощность на валу (к примеру инерция) может все закончится феерверком. Гораздо безопаснее, лишние джоули слить на резистор. Посмотрите схемы частотников. У них там предусмотрен специальный транзистор и резистор, именно для того чтобы греть воздух резистором а не лавинным пробоем транзисторов. Цитата Сервопривод (серводвигатель), который я модернизировал 30 лет работал с электромашинным усилителем (ЭМУ) у которого выходное сопротивление очень близко к нулю и при снятии с его обмотки управления (возбуждения) напряжения или реверсе серводвигатель «гасил» всю свою энергию в якоре ЭМУ. И за 30 лет движки не разу не меняли. Я не понял. Вы чем управляете? Какое включение двигателя - последовательное, парралельное, независимое возбуждение или вообще постоянные магниты? Что за электромашинный усилитель? Г-Д? Трансформаторный усилитель? Цитата А разве при высоких частотах ключевой режим не может перейти в линейный? Тем более у полевиков довольна большая емкость. Может. Как правило одновременно с переходом транзисторов в газообразное состояние, кучей вони матюков.
|
|
|
|
|
|
|
|
Feb 3 2009, 22:11
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(Methane @ Feb 4 2009, 00:13) Паршиво сделано. Не учитывает нагрузку во время этих шагов. В другом диапазоне учитывает, а в этих нет? Как это понимать? Я же писал мне супер–пупер не нужен, в продаваемых сотнями, а может тысячами Gecko G320 и UHU никакой «хитрой» обратной связи по току нет, только прерывание через «защёлку» и на SD. Цитата(Methane @ Feb 4 2009, 00:13) Главное - контролировать ток. Для двигателя - главное именно ток. Он определяет момент. Вы ток, когда два нижних открыты не контролируете. А сталобыть если механика создаст приличную мощность на валу (к примеру инерция) может все закончится феерверком. Гораздо безопаснее, лишние джоули слить на резистор. Посмотрите схемы частотников. У них там предусмотрен специальный транзистор и резистор, именно для того чтобы греть воздух резистором а не лавинным пробоем транзисторов. В частотниках мне кажется это немного не то, в сервоприводах рекуперация гасится через RC цепочку и через открытые транзисторы, например при ШИМ 50/50 (здесь я в этом не совсем уверен). Да признаю, что с одним токоизмерительным резистором возможен «плачевный» исход. Тоже об этом писал выше. Цитата(Methane @ Feb 4 2009, 00:13) Я не понял. Вы чем управляете? Какое включение двигателя - последовательное, парралельное, независимое возбуждение или вообще постоянные магниты? Что за электромашинный усилитель? Г-Д? Трансформаторный усилитель? У меня независимое параллельное возбуждение. А это то здесь при чём? Якорь то один и я по нему управляю. ЭМУ это такой большой и тяжёлый аппарат, состоящий с одной стороны из асинхронного двигателя с другой – генератора. Про регулировку напряжения по возбуждению в генераторе объяснять не надо?
|
|
|
|
|
|
|
|
Feb 3 2009, 22:28
|
Гуру
Группа: Свой
Сообщений: 3 615
Регистрация: 12-01-09
Из: США, Главное разведовательное управление
Пользователь №: 43 230
|
Цитата(arisov @ Feb 4 2009, 00:11) У меня независимое параллельное возбуждение. А это то здесь при чём? Если бы было последовательное, было бы проще. Цитата Якорь то один и я по нему управляю.
ЭМУ это такой большой и тяжёлый аппарат, состоящий с одной стороны из асинхронного двигателя с другой – генератора. Про регулировку напряжения по возбуждению в генераторе объяснять не надо? Нет. Но все же у него несколько большая инерционность по сравнению в с мосфетами.
|
|
|
|
|
|
|
|
Feb 3 2009, 22:35
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(Methane @ Feb 4 2009, 01:28) Если бы было последовательное, было бы проще. Как бы тогда я его реверсировал? Я понимаю, что проще, замкнул всё напряжения с обмоток и ни каких искорок.
|
|
|
|
|
|
|
|
Feb 3 2009, 22:43
|
Гуру
Группа: Свой
Сообщений: 3 615
Регистрация: 12-01-09
Из: США, Главное разведовательное управление
Пользователь №: 43 230
|
Цитата(arisov @ Feb 4 2009, 00:35) Как бы тогда я его реверсировал? Менять полярность включения обмоток религия не позволяет? Цитата Я понимаю, что проще, замкнул всё напряжения с обмоток и ни каких искорок. Но не так быстро.
|
|
|
|
|
|
|
|
Feb 3 2009, 22:52
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(Methane @ Feb 4 2009, 01:43) Менять полярность включения обмоток религия не позволяет? Это, что ещё четыре транзистора добавлять и как их потом с другими четырьмя последовательно соеденить? Или релюшкой? За секунду иногда раза два реверс происходит. Всё догадался как- обмотку возбуждения в цепь питания транзисторов (лучше вверхних). Но недостаток - провода надо в движке "разрывать"
Сообщение отредактировал arisov - Feb 3 2009, 22:57
|
|
|
|
|
|
|
|
Feb 4 2009, 08:04
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Вот ещё вопросик у меня возник. В UHU сервоконтроллере ШИМ «выходит» с одного выхода МК (РВ3/ОС1) и на входы драйверов поступает один прямой и другой инверсный (через внешний инвертор) сигналы. В режиме удержания позиции ШИМ 50/50, при движении ширина импульсов соответственно пропорционально изменяется. В моём варианте (даже не в моём, а оригинал «движка» - http://elm-chan.org/works/smc/report_e.html ) с МК «выходит» два ШИМ (ОС1А и ОС1В) тоже как бы прямой и инверсный. В режиме удержания позиции ШИМ 0/0. При движении в ту или иную сторону сигнал появляется только на одном из соответствующих направл. движения выходов. Получается, что в UHU контроллере ток (с частотой 20кГц – меняя свою полярность) через двигатель протекает всегда, а в оригинале (UHU контроллер тоже «вышел» из Ченовского) - логически более правильно (на мой взгляд) - в режиме уд.позиции не греет воздух, не «пылит», во время движения дополнительно не притормаживает противоключением. Вроде бы одни плюсы Ченовского варианта, но разработчик UHU почему то отказался от этого. Как думаете, почему?
|
|
|
|
|
|
|
|
Feb 4 2009, 10:31
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(Methane @ Feb 4 2009, 13:06) ... Это только тормозить двигателем, закоротив его, несколько "странная" идея, потому что ток при этом не контролируется. Что Вы до этого докапались, я сам вперёд вас заметил свою ошибку. Считаёте, что у меня на схемах стоят по 2 токоизмерительных резистора и я контролирую ток, что изменилось? Цитата(Methane @ Feb 4 2009, 13:06) Только шумов будет меньше, потому что в воздухе болтаться выводы не будут Шумов во время «Стоп» гораздо больше, чем при движении. Я специально пробовал ШИМ 50/50, правда для другой цели – проверки усилия торможения при ШИМ=50/50 и при зашунтированном двигателе. На «ощупь» разницы не заметил, но в стоящих рядом колонках с усилителем при 50/50 такой рокот поднимается! При увеличении скорости он снижался! С оригин. Ченовским вариантом рокота почти не слышно.
Сообщение отредактировал arisov - Feb 4 2009, 10:35
|
|
|
|
|
|
|
|
Feb 4 2009, 11:05
|
Местный
Группа: Свой
Сообщений: 426
Регистрация: 5-04-07
Из: Санкт-Петербург
Пользователь №: 26 782
|
Цитата(haker_fox @ Feb 4 2009, 12:39) Кстати, вот это не совсем и понятно. Зачем во время движения притормаживать? В паузах ШИМа выводы двигателя должны болтаться в "воздухе" (ИМХО). Болтается г... в проруби, а в паузах ШИМ ток замыкается через обратные диоды.
|
|
|
|
|
|
|
|
Feb 4 2009, 13:48
|

Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
Цитата(VladimirYU @ Feb 4 2009, 19:05) Болтается г... в проруби А я думал, что вежливость котируется... видимо ошибался...  Цитата(VladimirYU @ Feb 4 2009, 19:05) а в паузах ШИМ ток замыкается через обратные диоды. Может быть я плохо понимаю что-то, но я не понимаю, как он замыкается через диоды? Диоды включены (по отношению к двигателю) как выпрямительный мост. И противоЭДС, которая появляется на клеммах двигателя во время пауз ШИМа стекает по диодам на линии питания. Если, как Вы говорите, происходит замыкания, то как работаю измерения скорости по противоЭДС? Сори, если ошибаюсь. Прошу не пинать, а пояснить.
--------------------
Выбор.
|
|
|
|
|
|
|
|
Feb 5 2009, 06:21
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Как измеряют ЭДС не знаю, но как «бороться со стеканием по диодам на линии питания» (рекуперация) в UHU и Gecko Servo Drives вот здесь пишут http://www.cnczone.com/forums/showthread.php?t=67118(одних из дискуссирующих Mariss Freimanis – разработчик Gecko http://www.geckodrive.com) Чтобы не регетиться – вот некоторые файлики оттуда.
|
|
|
|
|
|
|
|
Feb 5 2009, 06:45
|
Местный
Группа: Свой
Сообщений: 426
Регистрация: 5-04-07
Из: Санкт-Петербург
Пользователь №: 26 782
|
Цитата(haker_fox @ Feb 4 2009, 16:48) А я думал, что вежливость котируется... видимо ошибался... Может быть я плохо понимаю что-то, но я не понимаю, как он замыкается через диоды? Диоды включены (по отношению к двигателю) как выпрямительный мост. И противоЭДС, которая появляется на клеммах двигателя во время пауз ШИМа стекает по диодам на линии питания. Если, как Вы говорите, происходит замыкания, то как работаю измерения скорости по противоЭДС? Сори, если ошибаюсь. Прошу не пинать, а пояснить. По сути не цепляясь к терминам "болтаютя", "прорубь ", "г..." и т.д. Говорим о мостовой схеме. В промежутки паузы ШИМ, ток поддерживается за счет противоЭДС двигателя и замыкается через диоды и накопительный конденсатор источника питания, подзаряжая его. В этот период времени двигатель находится, по классификации принятой в теории электропривода, в режиме рекуперативного торможения. Т.е. отдача энергии производится в питающий источник. ЭДС вращения для двигателя постоянного тока определяется соотношением E = CeФw, Cе исключительно конструктивный коэффициент, Ф - поток возбуждения, который постоянен для ДПТ с постоянными магнитами, w - угловая скорость. В установившемся режиме на двигательном учаске механической характеристики уравнение электрической цепи U = E + IяRя => E = U = IяRя В вашем случае для моста при симметричном управлении U = Uип(1-2*y) y - скважность. При y =0.5 среднее значение U = 0? двигатель неподвижен. I - среднее значение тока якоря. Механические процессы на несколько порядков медленнее чем электрические в ШИМ с частотой в несколько килогерц. Поэтому замерив например с шунта усредненное значение тока (отфильтровав несущую ШИМ) и зная среднее значение напряжения (Вы же знаете каую скважность установили) можно косвенно вычислить среднюю скорость. Отмечу еще раз, что заамерять нужно ток через двигатель, а не ток потребляемый от источника питания. Данный способ используют в системах стабилизации, где нужно просто поддерживать примерно постоянную частоту вращения. В динамических системах необходимо применять непосредственное измерение. Цитата(arisov @ Feb 5 2009, 09:21) Как измеряют ЭДС не знаю, но как «бороться со стеканием по диодам на линии питания.... ( Да никак не надо с этим бороться, так устроена физика процессов энергопреобразования. Ничего отрицательного здесь нет.
|
|
|
|
|
|
|
|
Feb 8 2009, 21:24
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(VladimirYU @ Feb 5 2009, 09:45) Да никак не надо с этим бороться, так устроена физика процессов энергопреобразования. Ничего отрицательного здесь нет. По той ссылке которую я приводил выше, Mariss Freimanis (которого тамошние и не только обитатели считают Великим аналоговым схемотехником) приводил вот эту картинку и написал: I have attached a diode decoupled supply voltage scope trace going to a G320. Supply voltage is 48VDC, NEMA34 motor is decelerating from 3,000 RPM to zero in 100 milliseconds. Note the voltage going to near 80VDC, 30 volts higher than supply. Если я правильно понял, он пишет, что двигатель питающийся напряжением 48В при уменьшении числа оборотов с 3000 до 0 об/мин за 100мс даёт «всплеск» амплитудой до 80В, т.е превышает на 30В. Такой всплеск может «поломать» некоторые детальки, критичных по напряжению.
Прикрепленные изображения
|
|
|
|
|
|
|
|
Feb 9 2009, 06:30
|
Местный
Группа: Свой
Сообщений: 426
Регистрация: 5-04-07
Из: Санкт-Петербург
Пользователь №: 26 782
|
Цитата(arisov @ Feb 9 2009, 00:24) По той ссылке которую я приводил выше, Mariss Freimanis (которого тамошние и не только обитатели считают Великим аналоговым схемотехником) приводил вот эту картинку и написал: I have attached a diode decoupled supply voltage scope trace going to a G320. Supply voltage is 48VDC, NEMA34 motor is decelerating from 3,000 RPM to zero in 100 milliseconds. Note the voltage going to near 80VDC, 30 volts higher than supply.
Если я правильно понял, он пишет, что двигатель питающийся напряжением 48В при уменьшении числа оборотов с 3000 до 0 об/мин за 100мс даёт «всплеск» амплитудой до 80В, т.е превышает на 30В.
Такой всплеск может «поломать» некоторые детальки, критичных по напряжению. Гуру прав, но как всегда лишь отчасти. Рекуперация может привести к повышению напряжения на выходном конденсаторе силового ИП, за счет подзаряда его обратным током. Но этот эффект лечится за счет либо правильно выбранной емкости выходного конденсатора и параллельного резитора (достаточно высокоомного, чтобы не нагружать ИП), который обеспечивает разряд конденсатора. Нормальный конденсатор допускает кратковременные перенапряжения. В интеллектуальных мощных силовых мостах (IR, Motorola, Siemens) роль разрядника выполняет силовой транзистор включенный параллельно выходному конденсатору ИП. Но еще раз повторюсь, для маломощных двигателей этой проблемы не существует. Для тех же кто все таки "дует на холодную воду" можно рекомендовать при полном выключении двигателя (именно это худший случай, когда вся запасенная механическая энергия сливается в банку конденсатора) использовать режим динамического торможения, т. е. открывать (можно ШИМ) только оба нижних или верхних ключа моста.
|
|
|
|
|
|
|
|
Feb 9 2009, 08:14
|
Местный
Группа: Свой
Сообщений: 426
Регистрация: 5-04-07
Из: Санкт-Петербург
Пользователь №: 26 782
|
Цитата(arisov @ Feb 9 2009, 09:44) Согласен, особых проблем нет. Только при проектирование об этом надо помнить, например, при питании двигателя от 24-27В и БП для управления на КрЕНке подключенному к этому напряжению может возникнуть всплеск выше допустимого для стабилизатора. +1
|
|
|
|
|
|
|
|
Feb 14 2009, 07:20
|
Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
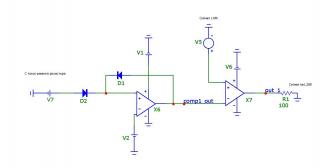
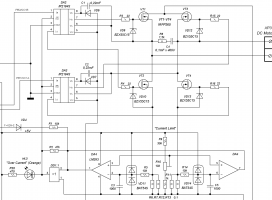
Опробовал в Micro-CAP9 двухуровневый ограничитель тока. Работает! Мне понравился! Выкладываю тут схемку для симулятора. Кратко о настройке схемы: 1. Опорами V6 и V3 задаем уровни токов для быстрой (fast) и медленной (slow) защиты. 2. Опорами V7 и V4 задаем через сколько каждая из защит должна сработать. Здесь ориентируемся на уравнение U = 5*(1 - exp(-1/RC)). Где RC - параметры соответствующей RC-цепи: R7C3 для fast, R4C2 для slow. Конечно защита "голая", т.е. ее еще нужно прикрутить к приводу, но этих решений вроде хватает на просторах инета.
--------------------
Выбор.
|
|
|
|
|
|
|
|
Feb 15 2009, 09:45
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(arisov @ Feb 4 2009, 11:04) …В UHU сервоконтроллере ШИМ «выходит» с одного выхода МК (РВ3/ОС1) и на входы драйверов поступает один прямой и другой инверсный (через внешний инвертор) сигналы. В режиме удержания позиции ШИМ 50/50, при движении ширина импульсов соответственно пропорционально изменяется. В моём варианте (даже не в моём, а оригинал «движка» - http://elm-chan.org/works/smc/report_e.html ) с МК «выходит» два ШИМ (ОС1А и ОС1В) тоже как бы прямой и инверсный. В режиме удержания позиции ШИМ 0/0. При движении в ту или иную сторону сигнал появляется только на одном из соответствующих направл. движения выходов. Получается, что в UHU контроллере ток (с частотой 20кГц – меняя свою полярность) через двигатель протекает всегда, а в оригинале (UHU контроллер тоже «вышел» из Ченовского) - логически более правильно (на мой взгляд) - в режиме уд.позиции не греет воздух, не «пылит», во время движения дополнительно не притормаживает противоключением. Вроде бы одни плюсы Ченовского варианта, но разработчик UHU почему то отказался от этого. Как думаете, почему? Попытался «нарисовать» схему с двумя токоизмерительными резисторами (см. рис) и вроде нашёл ответ на свой же вопрос. Скорее всего, разработчик UHU сервоконтроллера применил ШИМ 50/50 при удержании, по конструктивно-экономическим соображениям. Т.к. требуется в два раза меньше мощных резисторов (например, для варианта на 30А у UHU нужно 4 резистора 0,1 Ом, 5Вт, мне же тогда нужно будет 8 шт.) и компараторов. «Изобрести велосипед» не получается – чтобы было «дешёво и сердито». Придется всё-таки применять как у всех, несмотря на возможное ухудшение некоторых эксплуатационных характеристик. Связи с этим вопрос – AtMega8/48/88 может на выходах ОСnА и ОСnВ выдавать антисимметричную ШИМ (не знаю, как это точно называется) или всё таки надо использовать внешний инвертор?
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Feb 17 2009, 08:36
|
;
Группа: Участник
Сообщений: 5 646
Регистрация: 1-08-07
Пользователь №: 29 509
|
Цитата(arisov @ Feb 15 2009, 12:45)
Связи с этим вопрос – AtMega8/48/88 может на выходах ОСnА и ОСnВ выдавать антисимметричную ШИМ (не знаю, как это точно называется) или всё таки надо использовать внешний инвертор? Конечно может! В частности OC1A/OC1B - на всех 8/48/88. Немножко в офф-топик: dead-time программный тоже не шибко сложный. Но я использую Phase-Correct PWM - с ним легче. Цитата(haker_fox @ Feb 17 2009, 11:23) Это я к тому, что может быть все-таки встроенным АЦП ток мерить? Ну и компаратором быстро отлавливать большие токи, чтобы оперативно реагировать на значительные перегрузки. Совершенно АГА! Так и делаю.
|
|
|
|
|
|
|
|
Feb 17 2009, 09:01
|
Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
Цитата(Iptash @ Feb 17 2009, 16:41) Аппаратная защита это максимально-токовая защита, а время-токовая и т.п. все это АЦП->МК, я уж не раз писал. И еще, может показаться смешно, но не надо принебрегать предохранителями(имеется ввиду плавкими  ). Предохранителями я не принебрегаю...) Цитата(Tanya @ Feb 17 2009, 16:51) Немного добавлю в копилку. Берем геркон. Наматываем N витков. Грубый индикатор перегрузки.
Срабатывает за несколько миллисекунд. тогда уж лучше компаратор...
--------------------
Выбор.
|
|
|
|
|
|
|
|
Feb 18 2009, 09:45
|
Участник
Группа: Участник
Сообщений: 52
Регистрация: 10-10-08
Пользователь №: 40 823
|
Собрал схему токовой защиты на двух компараторах просимулировал в М-Сар вроде работает. Посоветуйте может что еще добавить?
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Mar 13 2009, 07:05
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
У меня при прерывании тока с IR2184 с внешней «защёлкой», т.е. при перегрузке напряжение на затворах транзисторов имеет чуть-чуть более «плавные фронты» и с более высокой частотой, чем в обычном режиме и соответственно транзисторы сильно нагреваются. Частота сигнала сброса RS-триггера – около 62кГц. ШИМ – 31кГц. Это так и должно быть (фронты и нагрев)?
Может это ещё одна из причин того, что при прерывание тока по входу (IN) (см. первое сообщение), когда «фронты крутые» - транзисторы не греются?
Может как вариант, попробовать 2 уровневую защиту: 1 «ступень» с меньшим опорным напряжении на компараторе «поступает» на IN, вторая – на SD? Есть в этом смысл?
_Pasha у Вас транзисторы при перегрузке сильно нагреваются? У меня уже при токе 1А – IRF260 (без радиатора) сильно, стоит подстроечником повысить уровень (отключить ограничение) – ток потребления двигателя возрастает, а транзисторы греются существенно меньше. Делаю прерывание по IN – тоже меньше греются. Всё как и было в предыдущем сервоконтроллере. Только сейчас у меня 2 токоизмерительных канала (по схеме, которую я «выкладывал» в сообщение №35).
|
|
|
|
|
|
|
|
Mar 13 2009, 08:04
|
;
Группа: Участник
Сообщений: 5 646
Регистрация: 1-08-07
Пользователь №: 29 509
|
Цитата(arisov @ Mar 13 2009, 11:05) _Pasha у Вас транзисторы при перегрузке сильно нагреваются? Отвечу вопросом на вопрос: Вы уверены, что у Вас ничего не "звенит" по цепи компаратор--SD ? Согласитесь, набор симптомов именно такой - при асинхронном выключении где-то возникает генерация. И уж не мне Вам говорить, что при генерации тепловые потери существенно выше. Защелка 2110 обязательно снимет подобные проблемы. Цитата(arisov @ Mar 13 2009, 11:05) чуть-чуть более «плавные фронты» и с более высокой частотой Нету ведь в 2184 мягкого выключения. Значит, плавные фронты - следствие возбуда. А колебательного процесса не видно, может параметры паразитного контура где-то в околокритической области. В общем, не должно так быть.
|
|
|
|
|
|
|
|
Mar 13 2009, 08:45
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(_Pasha @ Mar 13 2009, 11:04) ..Вы уверены, что у Вас ничего не "звенит" по цепи компаратор--SD ... Вроде ничего не звенит, насколько мне позволяет разглядеть мой "хр.. " осциллограф. А частота выше - из-за того что "сбрасываю" 62кГц. Если начинаю "сбрасывать" от ШИМ (31кц) (когда на обоих выходах/входах - нули, т.е в начале периода), то транзисторы не греются, но мощность движка резко падает. Может и это должно так быть? Но при старте, стопе и реверсе - момент тоже резко падает. И даже визуально видно, что "выбег" при резком стопе становиться больше и как следствие начинает дольше позиционироваться ("туда-сюда" ) Просто у меня нет "под рукой" ничего подобного, чтобы можно было бы с чем-то сравнить. Попробую ещё частотой сброса "поиграть". Цитата(_Pasha @ Mar 13 2009, 11:04) А колебательного процесса не видно, может параметры паразитного контура где-то в околокритической области. В общем, не должно так быть. Может быть и так - опять грешу на осциллограф - частота при заторможенном двигателе постоянно меняется и не как "засинхронизировать" не могу. Также присутствует такой момент. Если делаю ШИМ при удержании позиции («СТОП») 50/50, то транзисторы (без радиаторов) довольно так тёпленькие причём даже без подключенного двигателя. В IR284 Dead-Time не регулируемый – 500ns. Сначала в цепи затвора стояло только одно сопротивление – 24Ом. Затем изменил затворную цепь (для увеличения Dead-Time) как у UHU и как у меня было раньше (в 1 посте) – два резистора, диод и конденсатор – нагрев ещё больше стал, нарастание плавное, спад резкий. Потом ограничился только резистором (24Ом) и параллельным ему диодом. Нагрев резко сократился, но всё равно немного присутствует. (Пробовал с «разрядным» p-n-p транзистором – разницы никакой). На это можно не обращать внимание или это косвенно говорит о возбуждении или малом Dead_time?
|
|
|
|
|
|
|
|
Mar 13 2009, 09:10
|
;
Группа: Участник
Сообщений: 5 646
Регистрация: 1-08-07
Пользователь №: 29 509
|
Цитата(arisov @ Mar 13 2009, 12:45) В IR284 Dead-Time не регулируемый – 500ns. Сначала в цепи затвора стояло только одно сопротивление – 24Ом. Затем изменил затворную цепь (для увеличения Dead-Time) как у UHU и как у меня было раньше (в 1 посте) – два резистора, диод и конденсатор – нагрев ещё больше стал, нарастание плавное, спад резкий. Потом ограничился только резистором (24Ом) и параллельным ему диодом. Нагрев резко сократился, но всё равно немного присутствует. (Пробовал с «разрядным» p-n-p транзистором – разницы никакой). На это можно не обращать внимание или это косвенно говорит о возбуждении? Тут все в куче завязано: и сам Dead-Time, немного зависящий от топологии , в отличие от полумостовых драйверов, и емкость затвор-сток, благодаря которой приоткрывается транзюк. Я бы программный Dead-Time таки добавил бы.
|
|
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|



























 Я столько времени убил на эти раздумия... А все, оказывается, проще!
Я столько времени убил на эти раздумия... А все, оказывается, проще!