| |
 Контур тока (момента) при управление двигателем Контур тока (момента) при управление двигателем, Какое назначение ? |
|
|
|
|
 Jun 2 2016, 09:15 Jun 2 2016, 09:15
|
Участник

Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108

|
Подскажите, какое назначение контура тока (момента) в случае управления скоростью двигателя?
Задача, поддержание постоянной скорости вращения, вне зависимости от нагрузки, источник питания стабильный.
|
|
|
|
|
|
|
 |
Ответов
(1 - 99)
|
|
Jun 2 2016, 11:10
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(Tanya @ Jun 2 2016, 11:31)  Назначение контура тока - контролировать момент, как Вы правильно и написали.
Вы, наверное, что-то другое хотели спросить, но я не хочу догадываться... попробую перефразировать Зачем контролировать момент для стабилизации скорости? если нужна постоянная скорость , при переменой нагрузке, а не постоянный момент, при переменой нагрузке,
|
|
|
|
|
|
|
|
Jun 2 2016, 11:51
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(Tanya @ Jun 2 2016, 12:19) Уже лучше. Производная скорости (ускорение) пропорциональна моменту, поэтому получится правильное управление.
Простая аналогия - для управления температурой печки на нее подается контролируемая мощность. пример с печкой очень хороший, так как чуть попроще и при управление нагревателями тоже используют контур тока если предположить, что питание постоянно, сопротивление нагревательного элемента постоянно, то ток будет пропорционален напряжению, которое мы и так знаем, то зачем в этом случае добавлять контур тока? хорошая картинка 
|
|
|
|
|
|
|
|
Jun 2 2016, 13:22
|
Местный
Группа: Участник
Сообщений: 294
Регистрация: 29-06-11
Пользователь №: 65 952
|
Цитата(Lomax @ Jun 2 2016, 14:51) если предположить, что питание постоянно Наверное имеется ввиду напряжение питания постоянно, так вот предположение годиться для каких нибудь лабораторных опытов в лучшем случае, потому как даже ГОСТ даёт разбег по напряжению в несколько процентов. На производстве может и +-20% гулять и это нормально, вот поэтому нужно контролировать ток в общем случае (ну это касаемо нагревателя). Для электродвигателя еще хуже, помимо этого фактора еще есть такой нюанс (не уверен что ко всем типам двигателей относиться, хотя наверное ко всем): момент на двигателе пропорционален току, а напряжению только в том случае если есть условие постоянства частоты вращения, в общем случае на регулируемом приводе, напряжение не пропорционально моменту, что усложняет регулирование.
|
|
|
|
|
|
|
|
Jun 2 2016, 13:35
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(Lomax @ Jun 2 2016, 14:51) пример с печкой очень хороший, так как чуть попроще и при управление нагревателями тоже используют контур тока Там используют контур мощности (энергии). Цитата(Lomax @ Jun 2 2016, 14:51) если предположить, что питание постоянно, сопротивление нагревательного элемента постоянно, то ток будет пропорционален напряжению, которое мы и так знаем, то зачем в этом случае добавлять контур тока? Для точного регулирования надо учитывать именно мощность, так как может меняться как напряжение питания нагревателя, так и его сопротивление. Цитата(Lomax @ Jun 2 2016, 14:51) хорошая картинка Неплохая, но не совсем точная в Вашем случае. У мотора есть противоэдс, поэтому ток сложно задать прямо - используется еще один регулятор, который должен быть быстрым.
|
|
|
|
|
|
|
|
Jun 2 2016, 13:49
|
Частый гость
Группа: Свой
Сообщений: 134
Регистрация: 9-11-12
Из: г. Брянск
Пользователь №: 74 311
|
Цитата(Lomax @ Jun 2 2016, 12:15) Подскажите, какое назначение контура тока (момента) в случае управление скоростью двигателя?
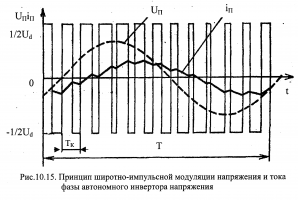
Задача, поддержание постоянной скорости вращения, вне зависимости от нагрузки, источник питания стабильный. Для обеспечения требуемых динамических характеристик электропривода (быстродействие, перерегулирование). На картинке, которую Вы привели выше, изображена классическая система подчиненного управления. Дело в том, что для настройки внешнего контура необходимо, чтобы внутренний контур (в данном случае - контур тока) имел определенные параметры. Т.е. задаются желаемой передаточной функцией контура тока и находят коэффициенты регулятора. Если этого не делать, то динамика у привода может быть не очень хорошей. Например, при изменении нагрузки (момента сопротивления на валу электродвигателя) скорость будет оооооочень медленно меняться, что может быть недопустимо для данного механизма.
|
|
|
|
|
|
|
|
Jun 2 2016, 14:27
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
спасибо, уже есть чуточку понимания Получается в случае нагревательного элемента если гарантируется стабильность напряжения (к примеру 1%), и пренебречь малым температурным коэффициентом сопротивления нихрома, да к тому же добавить малое изменение температуры, то контур тока не сильно необходим ? в случае мотора (если исключить нестабильность питания), то контур тока(момента) необходим для компенсации нелинейности перевода напряжения в ток(момент,скорость) Цитата(dima32rus @ Jun 2 2016, 14:49) Для обеспечения требуемых динамических характеристик электропривода (быстродействие, перерегулирование). На картинке, которую Вы привели выше, изображена классическая система подчиненного управления. Дело в том, что для настройки внешнего контура необходимо, чтобы внутренний контур (в данном случае - контур тока) имел определенные параметры. Т.е. задаются желаемой передаточной функцией контура тока и находят коэффициенты регулятора.
Если этого не делать, то динамика у привода может быть не очень хорошей. Цитата Например, при изменении нагрузки (момента сопротивления на валу электродвигателя) скорость будет оооооочень медленно меняться, что может быть недопустимо для данного механизма. можно с этого момента поподробнее, как контур тока поможет улучшить динамику? к примеру есть установившаяся скорость , и соответственно ей некий ток и момент, вдруг увеличилась нагрузка и соответственно ток, но контур тока мгновенно отреагирует уменьшением тока, чтобы удержать заданную уставку или наличие контура тока позволяет сделать более резкий контур скорости ?
|
|
|
|
|
|
|
Guest_TSerg_*
|
Jun 2 2016, 15:28
|
Guests
|
Чаще используют токовый контур с отсечкой, для обеспечения движения с постоянным моментом в переходных режима.
Вот попробуйте включить двигатель (коллекторный, к примеру) на полное напряжение - не все типы могут даже выдержать такой разгон.
Ну а так, ставьте у себя симулирующий софт и упражняйтесь в стыковке теории и практики.
|
|
|
|
|
|
|
|
Jun 2 2016, 16:32
|
Частый гость
Группа: Свой
Сообщений: 134
Регистрация: 9-11-12
Из: г. Брянск
Пользователь №: 74 311
|
Цитата(Lomax @ Jun 2 2016, 17:27) можно с этого момента поподробнее, как контур тока поможет улучшить динамику?
к примеру есть установившаяся скорость , и соответственно ей некий ток и момент, вдруг увеличилась нагрузка и соответственно ток, но контур тока мгновенно отреагирует уменьшением тока, чтобы удержать заданную уставку или наличие контура тока позволяет сделать более резкий контур скорости ? При увеличении нагрузки сначала падает скорость, т.к. угловое ускорение прямо пропорционально динамическому моменту, а он у нас отрицательный (см. уравнение движения вращающегося тела). Соответственно, увеличивается разность между заданием на скорость, и реальной скоростью (см. картинку выше). Получается, что контур скорости увеличивает задание на ток. Контур тока в свою очередь отрабатывает увеличением тока (и электромагнитного момента, соответственно) таким образом, чтобы вернуть просевшую скорость к прежней величине. Это если мы говорим о системе стабилизации. Конечно, теоретически можно обойтись и без контура тока, посчитав соответствующий регулятор скорости. Но фокус в том, что для обеспечения заданных параметров регулирования у вас получится физически не реализуемый регулятор. Часто так оно и бывает. Контур тока как раз позволяет это обойти и добиться более высокого качества управления.
|
|
|
|
|
|
|
Guest_TSerg_*
|
Jun 2 2016, 18:19
|
Guests
|
Полагаю, что ТС-ру будет полезно вначале ознакомиться с учебной литературой, а потом уже задавать вполне конкретные вопросы: http://window.edu.ru/resource/314/75314/fi...rakt_2010_1.pdfP.S. Частным случаем САР является регулирование одного параметра (координаты) объекта. Вместе с тем, почти всегда возникает необходимость регулирования/ограничения промежуточных координат объекта. Одним из методом построения такой САР как раз и является метод подчиненного регулирования. В этом случае, по основной и каждой необходимой промежуточной координате, заводится своя обратная связь и проектируется свой регулятор. Это позволяет упростить процесс проектирования, двигаясь от внутреннего к внешним контурам. ПФ регуляторов используются из стандартных, что тоже упрощает задачу. Число контуров редко превышает 3 (трех), т.к. нарастает проблема быстродействия, поскольку каждый внешний контур должен (и будет) иметь быстродействие ниже, чем ближайший внутренний.
|
|
|
|
|
|
|
Guest_TSerg_*
|
Jun 2 2016, 20:34
|
Guests
|
Цитата(Andreas1 @ Jun 2 2016, 22:09) На гиктаймсе была интересная серия статей Ну.. в целом, неплохо, хотя хватает отсебятины и не хватает академичности ( хотя бы технических аспектов ). Что радует, что уже успели потестировать отечественный мотор-проц, о котором тут недавно была ветка. Ну и да - чел из статьи явно путает сервопривод и принцип подчиненного регулирования. Сервопривод сейчас легко исполняется в пространстве состояний координат и без вложенных контуров. Еще один из методов управления сервоприводом - терминальное управление.
|
|
|
|
|
|
|
|
Jun 6 2016, 10:46
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Спасибо всем еще вопросы как правильно измерять ток? Кто должен интегрировать ток? ОУ или сам процессор? Если сам процессор, то в какой момент производить замер АЦП? Сколько измерений за период ШИМ? вот к примеру в схеме http://motorcontrol.ru/wp-content/uploads/...TI-Inverter.pdfникаких интегрирующих цепочек нет
|
|
|
|
|
|
|
Guest_TSerg_*
|
Jun 6 2016, 17:50
|
Guests
|
Цитата(Lomax @ Jun 6 2016, 13:46) еще вопросы
как правильно измерять ток?
Кто должен интегрировать ток? ОУ или сам процессор?
Если сам процессор, то в какой момент производить замер АЦП? Сколько измерений за период ШИМ? После таких вопросов даже наводящие вопросы исчезли сами собой.
|
|
|
|
|
|
|
|
Jun 6 2016, 22:00
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(TSerg @ Jun 6 2016, 18:50) После таких вопросов даже наводящие вопросы исчезли сами собой. уж извините, сформулировал как смог какой вопрос смутил?
Сообщение отредактировал Lomax - Jun 7 2016, 08:20
|
|
|
|
|
|
|
|
Jun 7 2016, 05:06
|
Частый гость
Группа: Свой
Сообщений: 134
Регистрация: 9-11-12
Из: г. Брянск
Пользователь №: 74 311
|
Цитата(Lomax @ Jun 6 2016, 13:46) как правильно измерять ток? Датчиком тока. Цитата(Lomax @ Jun 6 2016, 13:46) Кто должен интегрировать ток? ОУ или сам процессор? Зачем Вам интегрировать ток? Цитата(Lomax @ Jun 6 2016, 13:46) Если сам процессор, то в какой момент производить замер АЦП? Сколько измерений за период ШИМ? Вот тут вообще непонятно, что имелось ввиду. Складывается впечатление, что у Вас нет системных знаний по поднятой Вами теме, и Вы оперируете различными терминами без понимания их сути и взаимосвязи между собой. В такой ситуации сложно советовать что-то конкретное.
|
|
|
|
|
|
|
|
Jun 7 2016, 07:26
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(dima32rus @ Jun 7 2016, 06:06) Датчиком тока. спасибо кеп Цитата Зачем Вам интегрировать ток? потому что там ШИМ, а нужно среднее значение за период, а не мгновенное Цитата Вот тут вообще непонятно, что имелось ввиду.
Складывается впечатление, что у Вас нет системных знаний по поднятой Вами теме, и Вы оперируете различными терминами без понимания их сути и взаимосвязи между собой.
В такой ситуации сложно советовать что-то конкретное. вы просто не поняли вопроса, вероятно в этом моя вина  вопрос, как правильно определить интегральное значение тока, 1. в нужный момент (какой) определить амплитуду и умножить на скважность 2. взять множество значений тока за период и проинтегрировать 3. интегратор реализовать аппаратно картинка, форма тока, напряжение на фазах, ток на фазе C мгновенное значение тока не зависит от скважности
Сообщение отредактировал Lomax - Jun 7 2016, 08:20
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Jun 7 2016, 08:10
|
Частый гость
Группа: Свой
Сообщений: 134
Регистрация: 9-11-12
Из: г. Брянск
Пользователь №: 74 311
|
Цитата(Lomax @ Jun 7 2016, 10:26) потому что там ШИМ, а нужно среднее значение за период, а не мгновенное Вот с этого места поподробнее, где там ШИМ и зачем нужно среднее значение тока?
|
|
|
|
|
|
|
|
Jun 7 2016, 08:16
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(dima32rus @ Jun 7 2016, 09:10) Вот с этого места поподробнее, где там ШИМ и зачем нужно среднее значение тока? ну я же картинку нарисовал, вроде все понятно или не особо? шимом управляется двигатель, шунты в истока транзисторах срендее значение за период шим
Сообщение отредактировал Lomax - Jun 7 2016, 08:20
|
|
|
|
|
|
|
|
Jun 7 2016, 08:33
|
Частый гость
Группа: Свой
Сообщений: 134
Регистрация: 9-11-12
Из: г. Брянск
Пользователь №: 74 311
|
Цитата(Lomax @ Jun 7 2016, 11:16) ну я же картинку нарисовал, вроде все понятно или не особо?
шимом управляется двигатель, шунты в истока транзисторах
срендее значение за период шим Это где Вы видели такую форму тока при ШИМ? Да еще в трехфазной обмотке статора?
|
|
|
|
|
|
|
|
Jun 7 2016, 08:47
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(dima32rus @ Jun 7 2016, 09:33) Это где Вы видели такую форму тока при ШИМ? Да еще в трехфазной обмотке статора? на осциллографе  а какая по вашему форма тока при шим ?
Сообщение отредактировал Lomax - Jun 8 2016, 07:03
|
|
|
|
|
|
|
|
Jun 7 2016, 09:19
|
Частый гость
Группа: Свой
Сообщений: 134
Регистрация: 9-11-12
Из: г. Брянск
Пользователь №: 74 311
|
Цитата(Lomax @ Jun 7 2016, 11:47) а какая по вашему форма тока при шим ? У Вас в обмотке ток падает до нуля? А какой период ШИМ?
|
|
|
|
|
|
|
|
Jun 7 2016, 09:22
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(dima32rus @ Jun 7 2016, 10:19) У Вас в обмотке ток падает до нуля? А какой период ШИМ? а что ему деалать?, если все обмотки на 0 или +пит ШИМ 6кГц, 10 , 20 тож самое http://www.powerguru.org/sensorless-field-...icrocontroller/ Сообщение отредактировал Lomax - Jun 7 2016, 09:29
Сообщение отредактировал Lomax - Jun 7 2016, 09:29
|
|
|
|
|
|
|
|
Jun 7 2016, 09:52
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
ток в истоке транзистора   задам вопрос по другому, как правильно получать ток в обмотке зная ток в истоке транзистора
Сообщение отредактировал Herz - Jun 7 2016, 21:40
|
|
|
|
|
|
|
|
Jun 7 2016, 10:02
|
Частый гость
Группа: Свой
Сообщений: 134
Регистрация: 9-11-12
Из: г. Брянск
Пользователь №: 74 311
|
Цитата(Lomax @ Jun 7 2016, 12:52) задам вопрос по другому, как правильно получать ток в обмотке зная ток в истоке транзистора Через датчик тока. Нужно измерять ток в обмотке, а не на ключе. Советую все таки начать с электропривода постоянного тока. Там попроще будет для понимания.
|
|
|
|
|
|
|
|
Jun 7 2016, 10:25
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(dima32rus @ Jun 7 2016, 11:02) Через датчик тока. шунт то можно использовать ? Цитата Нужно измерять ток в обмотке, а не на ключе. вы хотите сказать что невозможно определить ток в обмотке по току на ключах ? стр.7 http://motorcontrol.ru/wp-content/uploads/...TI-Inverter.pdfмогу кучу схем, показать где измеряют ток на ключах, они неправильные ? Цитата Советую все таки начать с электропривода постоянного тока. Там попроще будет для понимания. Пьяный мужик что-то ищет под фонарем. Тут к нему под ходит милиционер и спрашивает: "Что вы тут делаете?" Мужик отвечает: "Ключи от квартиры ищу". "А где потерял?". "В парке". "А зачем здесь ищешь?". "А здесь светлее ".
Сообщение отредактировал Lomax - Jun 7 2016, 10:25
|
|
|
|
|
|
|
|
Jun 7 2016, 10:46
|
Частый гость
Группа: Свой
Сообщений: 134
Регистрация: 9-11-12
Из: г. Брянск
Пользователь №: 74 311
|
Цитата(Lomax @ Jun 7 2016, 13:25) шунт то можно использовать? Можно использовать все, что хотите. Главное, чтобы на выходе была величина, пропорциональная току. Цитата(Lomax @ Jun 7 2016, 13:25) вы хотите сказать что невозможно определить ток в обмотке по току на ключах? стр.7 http://motorcontrol.ru/wp-content/uploads/...TI-Inverter.pdfмогу кучу схем, показать где измеряют ток на ключах, они неправильные? Нет, я так не хочу сказать. Сможете получить токи обмоток через токи в ключах - пожалуйста.
|
|
|
|
|
|
|
|
Jun 7 2016, 12:09
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(dima32rus @ Jun 2 2016, 19:32) Конечно, теоретически можно обойтись и без контура тока, посчитав соответствующий регулятор скорости. Но фокус в том, что для обеспечения заданных параметров регулирования у вас получится физически не реализуемый регулятор. Часто так оно и бывает. Контур тока как раз позволяет это обойти и добиться более высокого качества управления. В этой задаче, вполне, можно обойтись без контура тока. Не только теоретически, но и практически. Могу дать ссылку на конкретное изделие, где это реализовано: http://www.ellab.ru/Pages/AWD17.aspxНо это не означает, что ток не нужно контролировать - нужно! Только к задаче регулирования это уже прямого отношения не имеет. Должна быть реализована токовая защита выходных ключей, предотвращающая их разрушение при превышении значения тока некоторого заданного безопасного порога. Например, при перегрузке двигателя, коротком замыкании, механическом заклинивании, слишком резком торможении и т.д. В указанном по ссылке изделии, датчик тока отсутствует, как таковой. Нет даже токового шунта. Пороговое значение тока оценивается по величине падения напряжения на открытых силовых ключах. Кстати, датчик скорости там тоже отсутствует. Скорость определяется по противо-ЭДС двигателя. Тем не менее, все работает, регулируется, заданная скорость поддерживается постоянной, при изменяющейся нагрузке на двигатель. И постоянное, стабильное значение напряжения источника питания в этой задаче, в общем-то, тоже не обязательно.
Сообщение отредактировал @Ark - Jun 7 2016, 12:41
|
|
|
|
|
|
|
|
Jun 7 2016, 13:10
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(@Ark @ Jun 7 2016, 13:09) В этой задаче, вполне, можно обойтись без контура тока. Не только теоретически, но и практически. Могу дать ссылку на конкретное изделие, где это реализовано: [url="http://electronix.ru/redirect.php?http://www.ellab.ru/Pages задача немного сложнее, это серво привод на вентильном двигателе, т.е. требуется упр. на около нулевых скоростях
|
|
|
|
|
|
|
|
Jun 7 2016, 13:29
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(Lomax @ Jun 7 2016, 16:10) задача немного сложнее, это серво привод на вентильном двигателе, т.е. требуется упр. на около нулевых скоростях Я на ваш конкретный вопрос отвечал - можно ли без помощи контура тока выполнять регулирование и стабилизацию скорости вращения двигателя, в том числе, вблизи нулевых скоростей? Ответ - да, можно. Приведен пример реализации. Какова конкретная задача, и используемый тип двигателя - не имеет значения. Алгоритм регулирования скорости от этого не изменяется.
Сообщение отредактировал @Ark - Jun 7 2016, 13:40
|
|
|
|
|
|
|
|
Jun 7 2016, 14:28
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(@Ark @ Jun 7 2016, 14:29) Я на ваш конкретный вопрос отвечал - можно ли без помощи контура тока выполнять регулирование и стабилизацию скорости вращения двигателя, в том числе, вблизи нулевых скоростей?
Ответ - да, можно. Приведен пример реализации.
Какова конкретная задача, и используемый тип двигателя - не имеет значения.
Алгоритм регулирования скорости от этого не изменяется. спасибо ваше устройство может регулировать (удерживать скорость) вблизи нулевых? Меньше минимальных ? и это без контура позиции?  Цитата(Tanya @ Jun 7 2016, 15:13) Это был не его вопрос. Но контролируя ток, можно намного более лучше одеваться регулировать. а можно чуть чуть подробнее про лучше одеваться? чего мы лишимся без контура скорости?
|
|
|
|
|
|
|
|
Jun 7 2016, 15:02
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(Tanya @ Jun 7 2016, 17:13) ... контролируя ток, можно намного более лучше одеваться регулировать. Это вопрос спорный... Нужно конкретные задачи рассматривать. На сколько "более лучше" получится, и стоит ли "овчинка выделки." Как видите, в погоне за простотой и дешевизною изделия, и без контура тока можно все неплохо сделать. Цитата(Lomax @ Jun 7 2016, 17:28) ваше устройство может регулировать (удерживать скорость) вблизи нулевых? Меньше минимальных ? и это без контура позиции? Мочь-то оно может. Даже нулевую скорость будет удерживать. Но у Вас конечная цель другая - стабилизировать положение, а не скорость. По хорошему, тут нужна двухконтурная система. Внутренний, быстрый контур, стабилизирует скорость перемещения к заданному положению. А внешний, более медленный, стабилизирует уже, непосредственно, само положение. Но это в идеале. В реальности, часто используют совсем простой метод: обратная связь - рассогласование по положению, управляющий сигнал - напряжение на двигателе (коэффициент заполнения ШИМ, например). Не скажу, что это всегда и везде хорошо работает, но, тем не менее, используется.
Сообщение отредактировал @Ark - Jun 7 2016, 15:04
|
|
|
|
|
|
|
|
Jun 7 2016, 16:29
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(Tanya @ Jun 7 2016, 16:22) А что Вы будете регулировать без этого контура? Непонятно, что. Качество регулирования будет более хуже. вот как проверить студента, что он вообще реализовал контур по току ?
|
|
|
|
|
|
|
|
Jun 10 2016, 07:26
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 11-08-15
Пользователь №: 87 951
|
Проще всего это понять на примере автомобиля.
В автомобиле тоже двухконтурная система, педаль газа - это вход задания момента, водитель, это регулятор скорости.
Если представить себе, что в авто была бы одноконтурная система, то тогда педаль газа являлась бы входом задания скорости, т.е. положение педали однозначно бы определяло обороты двигателя. Теперь представьте себе это, автомобилем стало бы невозможно управлять.
|
|
|
|
|
|
|
|
Jun 11 2016, 14:23
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 11-08-15
Пользователь №: 87 951
|
Цитата(@Ark @ Jun 10 2016, 13:01) В сервоприводе, первый контур - выбор и стабилизация скорости перемещения, второй - стабилизация положения. В сервоприводе три контура: положение, скорость, момент.
|
|
|
|
|
|
|
|
Jun 11 2016, 19:47
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(ozone @ Jun 11 2016, 17:23) В сервоприводе три контура: положение, скорость, момент. Можно и такую систему построить. Тогда возвращаемся исходному вопросу темы: Цитата(Lomax @ Jun 2 2016, 12:15) Подскажите, какое назначение контура тока (момента) в случае управление скоростью двигателя? Хотя ТС спрашивал об управлении скоростью. Далее выяснилось, что речь идет о сервоприводе. Вот и объясните ТС, зачем нужен контур тока (момента) в этом случае. Почему он необходим, с Вашей точки зрения? Зачем Вы рекомендуете трех контурную систему?
|
|
|
|
|
|
|
|
Jun 12 2016, 16:33
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(Tanya @ Jun 12 2016, 16:18) Если понятно, что для управления положением нужно контролировать скорость - производную положения, то совершенно ясно, что для управления скоростью нужно контролировать момент - производную скорости. Остается только добавить, что с точки зрения стоимости системы управления, не всегда экономически целесообразно реализовывать полную трех контурную систему управления. Очень часто достаточно двухконтурной, а во многих случаях и одно контурной. В конечном итоге, все определяется техническими и стоимостными требованиями к системе. Цитата(Herz @ Jun 12 2016, 18:43) Почему бы не пойти дальше, и не контролировать производную момента? На этот вопрос есть четкий теоретический ответ. Для описания поведения механических систем, достаточно производных от координат по времени не более, чем второго порядка. На этом постулате стоит Классическая Механика.
Сообщение отредактировал @Ark - Jun 12 2016, 16:34
|
|
|
|
|
|
|
|
Jun 15 2016, 08:58
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(TSerg @ Jun 2 2016, 20:34) Сервопривод сейчас легко исполняется в пространстве состояний координат и без вложенных контуров.
Еще один из методов управления сервоприводом - терминальное управление. это что еще такое?  можно буквально в пару предложений и все же, как ПРАВИЛЬНО измерять ток, на шунтах на фазе, на транзисторах, использовать интегратор? 
|
|
|
|
|
|
|
|
Jun 15 2016, 23:50
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(Lomax @ Jun 15 2016, 11:58) и все же, как ПРАВИЛЬНО измерять ток, на шунтах на фазе, на транзисторах, использовать интегратор? Что такое ПРАВИЛЬНО в Вашем понимании? Вы, наверное, чистый теоретик? Разработчик (практик) подобными категориями старается не оперировать. То, что хорошо ("правильно") для одной задачи, может совершенно не годиться для другой. Общего, единственно ПРАВИЛЬНОГО решения, на все случаи жизни - нет. Пока Вы не сформулировали критерии "правильности" решения, конкретные технические (и экономические) требования к системе - этот вопрос не имеет ни какого смысла.
|
|
|
|
|
|
|
Guest_TSerg_*
|
Jun 16 2016, 10:25
|
Guests
|
Цитата(Lomax @ Jun 15 2016, 11:58) это что еще такое? Google-ы в помощь: - пространство состояний в теории управления; - терминальное управление или управление конечным состоянием.
|
|
|
|
|
|
|
|
Jun 17 2016, 18:00
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 11-08-15
Пользователь №: 87 951
|
Цитата(Herz @ Jun 10 2016, 13:43) По-моему, эту "аналогию" не то что проще, вообще понять невозможно.  Это у кого нет образного воображения, тому сложно понять. Если бы у автомобиля теоретически было 1-контурное управление, когда положение педали газа однозначно определяет скорость вращения колёс, автомобилем управлять стало бы невозможно. Водитель является в этом случае регулятором. Ему дали задание разогнаться до 100км/ч. Он чуть нажмёт на педаль и колёса мгновенно начнут вращаться с пробуксовкой. А на скорости бросит газ и колёса застопорятся. Введение второго контура, где положение педали определяет тяговый момент решает эту проблему. Вариант с электродвигателем и приводом ничем по сути не отличается. Да, можно сделать и с одним контуром, но тогда очень сложно настроить постоянные ПИД регулятора и при малейшем изменении параметров нагрузки их придётся перестраивать.
|
|
|
|
|
|
|
|
Jun 17 2016, 19:15
|

Гуру
Группа: Модераторы
Сообщений: 10 983
Регистрация: 23-11-05
Пользователь №: 11 287
|
Цитата(ozone @ Jun 17 2016, 20:00) Это у кого нет образного воображения, тому сложно понять. Наверное, у меня нет, поэтому не понимаю. Водитель действительно не управляет скоростью вращения колёс, он о ней ничего не знает. Тупо нажал на газ - машина разгоняется в силу инерции. Увидел на спидометре 100км/ч - отпустил педаль, та же инерция замедляет движение. Да, по сути, водитель оперирует током (поТОКом горючего), но где тут второй контур? Вот если бы ему дали задание разогнаться, скажем, не за 6сек (как предел), а за 20, тогда - да, следил бы за ускорением, и это был бы второй контур.
|
|
|
|
|
|
|
|
Jun 17 2016, 19:32
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(ozone @ Jun 17 2016, 21:00) Если бы у автомобиля теоретически было 1-контурное управление, когда положение педали газа однозначно определяет скорость вращения колёс, автомобилем управлять стало бы невозможно.
Водитель является в этом случае регулятором. Ему дали задание разогнаться до 100км/ч. Он чуть нажмёт на педаль и колёса мгновенно начнут вращаться с пробуксовкой. А на скорости бросит газ и колёса застопорятся... Такое возможно, лишь чисто теоретически. И только в Теории Автоматического Управления. В нашей, физической реальности, описываемой законами классической механики, такое невозможно, в принципе! Причина изменения Положения - Скорость. Причина изменения Скорости - Ускорение. Причина наличия Ускорения - Сила. Причина появления Силы - Внешнее Воздействие (ток. трение, нагрузка...) В конечном счете, мы можем управлять только Силой! Которая, складываясь с другими силами, даст равнодействующую, определяющую ускорение, скорость, положение... В этом, отношении, Tanya - "более права", чем все остальные. А сколько контуров должно быть в системе управления - это вопрос чисто практический...
Сообщение отредактировал @Ark - Jun 18 2016, 00:13
|
|
|
|
|
|
|
|
Jun 18 2016, 17:12
|
Участник
Группа: Участник
Сообщений: 47
Регистрация: 11-08-15
Пользователь №: 87 951
|
Цитата(khach @ Jun 18 2016, 12:22) а мне студент написал однокотнурную модель управления автомобилем, где положение педали газа определяло ПОЗИЦИЮ автомобиля Нажал - и ты в Воркуте.
|
|
|
|
|
|
|
|
Jun 19 2016, 17:05
|

Местный
Группа: Участник
Сообщений: 265
Регистрация: 19-01-12
Пользователь №: 69 736
|
Цитата(Lomax @ Jun 6 2016, 13:46) как правильно измерять ток?
Если сам процессор, то в какой момент производить замер АЦП? Сколько измерений за период ШИМ? В схеме с ШИМ управлением 3-х фазным двигателем токи оцифровываются 1 раз за период ШИМа. Счетчик ШИМа используется симметричный и оцифровка АЦП производится в момент максимального значения счетчика ШИМ. Ток имеет пилообразную форму (нагрузка LR). Цитата(Lomax @ Jun 2 2016, 12:15) Подскажите, какое назначение контура тока (момента) в случае управление скоростью двигателя?
Задача, поддержание постоянной скорости вращения, вне зависимости от нагрузки, источник питания стабильный. Для увеличения запаса устойчивости (а иногда и устойчивости в принципе). И как следствие - достижение быстродействия, точности. Не сравнивайте с ДПР - там напряжение пропорционально скорости. В трехфазном двигателе - скорость пропорциональна двойному интегралу от напряжения. Цитата(dima32rus @ Jun 7 2016, 13:02) Нужно измерять ток в обмотке, а не на ключе. Зная состояния ключей и токи через ключи не составляет проблем вычислить токи в обмотках. Фирма STM пошла еще дальше - они вообще один шунт используют для трехфазного двигателя от нуля питания для вычисления токов фаз.
Сообщение отредактировал Elsystems - Jun 19 2016, 17:07
|
|
|
|
|
|
|
|
Jun 21 2016, 05:52
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(Elsystems @ Jun 19 2016, 17:05) В схеме с ШИМ управлением 3-х фазным двигателем токи оцифровываются 1 раз за период ШИМа. Счетчик ШИМа используется симметричный и оцифровка АЦП производится в момент максимального значения счетчика ШИМ. Ток имеет пилообразную форму (нагрузка LR).
Зная состояния ключей и токи через ключи не составляет проблем вычислить токи в обмотках. так ток через ключи имеет импульсное значение и момент перехода через 0 всегда равен нулю , получается в случае ключей без интеграции не обойтись ? 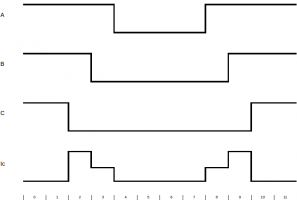 Цитата Фирма STM пошла еще дальше - они вообще один шунт используют для трехфазного двигателя от нуля питания для вычисления токов фаз. это в каком примере? Цитата(@Ark @ Jun 15 2016, 23:50) Что такое ПРАВИЛЬНО в Вашем понимании?
Вы, наверное, чистый теоретик? Разработчик (практик) подобными категориями старается не оперировать.
То, что хорошо ("правильно") для одной задачи, может совершенно не годиться для другой.
Общего, единственно ПРАВИЛЬНОГО решения, на все случаи жизни - нет.
Пока Вы не сформулировали критерии "правильности" решения, конкретные технические (и экономические)
требования к системе - этот вопрос не имеет ни какого смысла. вы дали абсолютно верный ответ, но
Сообщение отредактировал Lomax - Jun 21 2016, 05:54
|
|
|
|
|
|
|
|
Jun 21 2016, 17:34
|
Местный
Группа: Участник
Сообщений: 265
Регистрация: 19-01-12
Пользователь №: 69 736
|
Цитата(Lomax @ Jun 21 2016, 08:52) так ток через ключи имеет импульсное значение и момент перехода через 0 всегда равен нулю , получается в случае ключей без интеграции не обойтись ? Так быть не должно. Какой у вас двигатель? L, R обмоток какое? Приведите все характеристики. Какая частота ШИМ? Цитата(Lomax @ Jun 21 2016, 08:52) это в каком примере? http://www.emcu.it/SILICA-MCU-SolutionSumm...ion_Control.pdfстр. 9.
|
|
|
|
|
|
|
|
Jun 22 2016, 05:13
|
Участник
Группа: Участник
Сообщений: 39
Регистрация: 20-01-16
Пользователь №: 90 108
|
Цитата(Elsystems @ Jun 21 2016, 17:34) Так быть не должно. Какой у вас двигатель? L, R обмоток какое? Приведите все характеристики. Какая частота ШИМ? ну как не может если так должно быть http://www.powerguru.org/sensorless-field-...icrocontroller/Цитата спасибо
|
|
|
|
|
|
|
|
Jun 22 2016, 13:01
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(khach @ Jun 22 2016, 13:47) Подскажите пожалуйста, как распередлять ресурсы процессора на каждый контур?
... как часто надо вызывать обсчет контура скорости и контура положения? Быстродействие вложенных контуров должно отличаться, примерно, на порядок. Внутренний всегда быстрее внешнего. То есть контур скорости должен работать в 10 раз быстрее контура положения, а контур ускорения (момента) - в 10 раз быстрее контура скорости. Конечно, это не "догма", а лишь простое правило для первого приближения. Далее можете уточнять и корректировать, по ходу решения конкретной задачи.
|
|
|
|
|
|
|
|
Jun 22 2016, 13:53
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(khach @ Jun 22 2016, 13:47) т.е предположим частота ШИМ 32 кгц, ток меряем в каждом периоде и отдаем в контур тока или средний за 4-8 периодов, или последний. Контур тока вызывается с частотой 8 кгц, т.е полоса максимум 800 гц ( в 10 раз меньше периода). Нет смысла частоту ШИМа делать больше частоты получения достоверных данных о токе и расчета поправок, только динамические потери увеличиваются.
|
|
|
|
|
|
|
|
Jun 22 2016, 14:15
|
Местный
Группа: Участник
Сообщений: 421
Регистрация: 2-01-08
Пользователь №: 33 778
|
Цитата(oleg_d @ Jun 22 2016, 16:53) Нет смысла частоту ШИМа делать больше частоты получения достоверных данных о токе и расчета поправок, только динамические потери увеличиваются. А величина пульсации тока как же? Ограничение скорости? И точность замеров будет ниже на низкой частоте, если делать мгновенные выборки в центре периода. Из-за того, что форма "пилы" пульсации не линейна. Цитата(Lomax @ Jun 21 2016, 08:52) так ток через ключи имеет импульсное значение и момент перехода через 0 всегда равен нулю , получается в случае ключей без интеграции не обойтись ? По схеме с двумя датчиками, выборку удобно делать когда открыты все нижние ключи, в центре периода. В момент когда ток идущий через них равен фазному, уже завершился переходный процесс переключения и ток пересекает свое среднее значение. Можно поискать другие окна между переключениями, подстраиваться под каждый период, но это заметно сложнее и измеренное значение уже нельзя будет считать достаточно близким к среднему, в нем будет еще и пульсация.
|
|
|
|
|
|
|
|
Jun 22 2016, 14:36
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(amaora @ Jun 22 2016, 17:15) А величина пульсации тока как же? Величина пульсации не уменьшится если с одинаковой поправкой в место одного запустить десять периодов. Цитата(Tanya @ Jun 22 2016, 17:25) ШИМ -неШим... Задача контура тока (момента) непрерывно следить за интегралом разности (ток - задатчик тока) и занулять его. В идеале, к которому нужно стремиться. Этого я не отрицаю.
|
|
|
|
|
|
|
|
Jun 22 2016, 14:54
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(oleg_d @ Jun 22 2016, 15:53) Нет смысла частоту ШИМа делать больше частоты получения достоверных данных о токе и расчета поправок, только динамические потери увеличиваются. Скажите это низкоиндуктивным сервам постоянного тока. Если сделать частоту ШИМ низкой, то ток успевает вырасти до неприличных значений. А считывание АЦП тока на каждом периоде ШИМ связано с особенностями таймера. Кстати, программная проверка на токовую перегрузку выполняется на каждом периоде и если два последовательных отсчета первышают уставку, уходим в защиту. Конечно можно поставить компараторы на выходы токовых датчиков и уходить в защиту аппаратно. Это кстати реализовано внутри STM32F3, но серия как то не прижилась пока. Токовые датчики по возможности надо ставить в диагональ моста ( последовательно с мотором с обеих сторон)- спасало от кругового огня на коллекторе и пробоя на корпус в двигателе. Резисторы после Н-моста на такое не среагируют. Так что токовый конутр нагружен вычислениями и сравнениями весьма сильно, надо его оптимизировать. Кстати, может кто подскажет, если планируется управление сервоприводом по интерфейсу типа CANOpen, как наиболее корректно представить величины из токвого контура в словаре CANOpen? Сделать буферизацию? А если передполагается управление с feedforward, когда величина из словаря CANOpen влияет на установку контура?
|
|
|
|
|
|
|
|
Jun 22 2016, 14:59
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
По моим представлениям, оптимум частоты ШИМ для подобных задач - где-то в диапазоне 10...20 кГц.
Выше - увеличиваются динамические потери, как уже говорили. Ниже - появляется неприятный слышимый звук.
Когда повышаете частоту, есть еще один нехороший эффект - время переключения ключей становится сопоставимым с периодом ШИМ.
Для регулятора, вообще-то, нужно усредненное значение тока, за цикл. Как его лучше получить - обрабатывая мгновенные значения АЦП, или аппаратным интегрированием - это вопрос отдельный.
Мгновенное значение тока тоже нужно отслеживать (причем, непрерывно) - для реализации токовой защиты ключей. Усредненное значение для этих целей, как правило, не годится. Мгновенные значения АЦП - тоже. Пороговый токовый компаратор, аппаратно отключающий драйверы (и/или ключи) - наверное, единственно возможное решение. Требования по быстродействию к этой цепи могут быть очень высокими.
Сообщение отредактировал @Ark - Jun 22 2016, 15:24
|
|
|
|
|
|
|
|
Jun 22 2016, 17:24
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(khach @ Jun 22 2016, 17:54) Скажите это низкоиндуктивным сервам постоянного тока. Если сделать частоту ШИМ низкой, то ток успевает вырасти до неприличных значений. У Вас случаи такой у кого та другой, я рассказывал что в них общее, а не то какая должна быть частота. Цитата(@Ark @ Jun 22 2016, 17:59) По моим представлениям, оптимум частоты ШИМ для подобных задач - где-то в диапазоне 10...20 кГц.
Выше - увеличиваются динамические потери, как уже говорили. Ниже - появляется неприятный слышимый звук.
Когда повышаете частоту, есть еще один нехороший эффект - время переключения ключей становится сопоставимым с периодом ШИМ. Где то так. Цитата Для регулятора, вообще-то, нужно усредненное значение тока, за цикл. Как его лучше получить - обрабатывая мгновенные значения АЦП, или аппаратным интегрированием - это вопрос отдельный. Может быть в каких то ситуациях усреднение за период сделать получится, но если применяется трехфазный (или многофазный) векторный ШЫМ (не путать с векторным управлением) ничего ни получится, по причине вражденой шумности. Цитата Мгновенное значение тока тоже нужно отслеживать (причем, непрерывно) - для реализации токовой защиты ключей. Усредненное значение для этих целей, как правило, не годится. Мгновенные значения АЦП - тоже. Пороговый токовый компаратор, аппаратно отключающий драйверы (и/или ключи) - наверное, единственно возможное решение. Требования по быстродействию к этой цепи могут быть очень высокими. Токовую защиту от КЗ надо делать аппаратно, как Вы пишите делается зашита от превышений тока, например в случае сбоя регулирования.
|
|
|
|
|
|
|
|
Jun 22 2016, 18:22
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(oleg_d @ Jun 22 2016, 20:24) Может быть в каких то ситуациях усреднение за период сделать получится... Я написал, не за период (ШИМ), а за цикл. Цикл работы регулятора тока, т.е. , как правило, несколько периодов ШИМ. Цитата(oleg_d @ Jun 22 2016, 20:24) Токовую защиту от КЗ надо делать аппаратно, как Вы пишите делается зашита от превышений тока, например в случае сбоя регулирования. В чем Вы видите различие защиты от КЗ и защиты от превышения мгновенного значения тока заданного порога? С моей точки зрения, это одно и то же явление. И защита здесь может быть только одна - реализованная аппаратно.
|
|
|
|
|
|
|
|
Jun 22 2016, 22:36
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(@Ark @ Jun 22 2016, 21:22) Я написал, не за период (ШИМ), а за цикл.
Цикл работы регулятора тока, т.е. , как правило, несколько периодов ШИМ. Кабы и так, как выше писал от этого только вред. Цитата В чем Вы видите различие защиты от КЗ и защиты от превышения мгновенного значения тока заданного порога?
С моей точки зрения, это одно и то же явление. И защита здесь может быть только одна - реализованная аппаратно. Разница принципиальная, после срабатывания по КЗ ситуация считается аварийной, инвертор надо выключать, после превышения стоит пробовать пере загрузится. Цитата(khach @ Jun 22 2016, 23:06) Вообще то очень бы хотелось посмотреть на схему силовой части сервопривода постоянного тока со всеми возможными защитами. Что Вы считаете сервоприводом постоянного тока.
|
|
|
|
|
|
|
|
Jun 22 2016, 23:22
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(khach @ Jun 23 2016, 01:53) Сервопривод на щеточных двигателях постоянного тока. Такими моторами серьезно не занимался, так что не советчик.
|
|
|
|
|
|
|
|
Jun 22 2016, 23:34
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(oleg_d @ Jun 23 2016, 01:28) Разница принципиальная, после срабатывания по КЗ ситуация считается аварийной, инвертор надо выключать, после превышения стоит пробовать перезагрузится. А как будете отличать - КЗ, или не КЗ, или не совсем КЗ? Пусковой режим, в тяжелых условиях, под нагрузкой - для привода мало чем отличается от КЗ, если, вообще, отличается. Или резкое торможение, например... Поэтому, режим КЗ, как и перегруз, - не повод, чтобы сразу бросать работу, и считать ситуацию аварийной.
|
|
|
|
|
|
|
|
Jun 23 2016, 00:11
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(@Ark @ Jun 23 2016, 02:34) А как будете отличать - КЗ, или не КЗ, или не совсем КЗ? Почитайте про способ защиты, в народе называемый DESAT, и все Вам станет ясно. Цитата Пусковой режим, в тяжелых условиях, под нагрузкой - для привода мало чем отличается от КЗ, если, вообще, отличается. Это не про моторы с электронным управлением.
|
|
|
|
|
|
|
|
Jun 23 2016, 18:00
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(khach @ Jun 23 2016, 18:08) Сервомоторы никто гонять в режиме 200-500% перегрузки в здравом уме не будет, хотя большинство сервоприводов это допускает. Обычно такой режим бывает при ошибках оператора Сервоприводы используют не только в станках... Обычно (часто) такой режим бывает при старте двигателя. Кратковременная пусковая мощность может многократно превышать максимальную рабочую (долговременную).
|
|
|
|
|
|
|
|
Jun 23 2016, 18:18
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(@Ark @ Jun 23 2016, 20:00) Сервоприводы используют не только в станках... Обычно (часто) такой режим бывает при старте двигателя.
Кратковременная пусковая мощность может многократно превышать максимальную рабочую (долговременную). Вот именно в сервоприводах броска тока и стараются не допустить. Раз есть этот обсуждаемый контур тока, то и стартуют с перегрузкой 120-150% от номинала максимум. И то, если это очень надо. В высокоточных приводах вообще стараются избегать работать за пределами 100%. Ну и в реале датчики тока обычно имеют запас по диапазону как раз до 200% тока - все что выше- аварийный режим с перегрузкой датчика "на упор". Даже с силовом приводе (тяговом) за 120-150% стараются не лезть. А 5-кратные броски при пуске- это в древних схемах на ЭМ пускателях было.
|
|
|
|
|
|
|
|
Jun 23 2016, 18:24
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(@Ark @ Jun 23 2016, 21:00) Сервоприводы используют не только в станках... Обычно (часто) такой режим бывает при старте двигателя.
Кратковременная пусковая мощность может многократно превышать максимальную рабочую (долговременную). Раз скажите в каких устройствах применяются такие режимы работы моторов с электронным управлением.
|
|
|
|
|
|
|
|
Jun 23 2016, 19:57
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(khach @ Jun 23 2016, 21:18) ... Цитата(oleg_d @ Jun 23 2016, 21:24) Раскажите, в каких устройствах применяются такие режимы работы моторов с электронным управлением... В устройствах, где к сервоприводам предъявляются такие же требования, как к силовым (тяговым) приводам. И между ними не делается принципиальных различий...
Сообщение отредактировал @Ark - Jun 23 2016, 19:59
|
|
|
|
|
|
|
|
Jun 24 2016, 20:42
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(@Ark @ Jun 23 2016, 22:57) В устройствах, где к сервоприводам предъявляются такие же требования, как к силовым (тяговым) приводам.
И между ними не делается принципиальных различий... Последних пять лет занимаюсь проектированием тяговых инверторов, тут можно ознакомится. http://electronix.ru/forum/index.php?showt...124160&st=0В связи с некоторым опытом в этих вопросах, могу сказать что Вы пишите глупости.
|
|
|
|
|
|
|
|
Jun 24 2016, 21:50
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(oleg_d @ Jun 24 2016, 23:42) В связи с некоторым опытом в этих вопросах, могу сказать что Вы пишите глупости. Во первых, Уважаемый, Вас уже просили, не вести дискуссию в подобном духе . Во вторых, Я Вас, повторно прошу, предъявить цитаты из моих сообщений, где, с Вашей точки зрения, написаны "глупости". С обязательным обоснованием Вашего мнения!
Сообщение отредактировал @Ark - Jun 25 2016, 02:26
|
|
|
|
|
|
|
|
Jun 25 2016, 04:23
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(oleg_d @ Jun 24 2016, 23:42) Последних пять лет занимаюсь проектированием тяговых инверторов, тут можно ознакомится. http://electronix.ru/forum/index.php?showt...124160&st=0А документация-то где на Ваши изделия? Или ссылка на нее? С чем предлагаете ознакомиться? Есть только картинки, да Ваши рассказы... Нет даже полного перечня характеристик... Несерьезно...
|
|
|
|
|
|
|
|
Jun 26 2016, 09:45
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(@Ark @ Jun 25 2016, 00:50) Во первых, Уважаемый, Вас уже просили, не вести дискуссию в подобном духе . Во вторых, Я Вас, повторно прошу, предъявить цитаты из моих сообщений, где, с Вашей точки зрения, написаны "глупости". С обязательным обоснованием Вашего мнения! (Сообщение 77. Пусковой режим, в тяжелых условиях, под нагрузкой - для привода мало чем отличается от КЗ, если, вообще, отличается.) Начнем с того что нет никакого пускового режима, есть максимальный допустимый крутящий момент вплоть до нулевых оборотов, в свою очередь для создания крутящего момента, через обмотки мотора надо пропустить ток. Так вот значение этого тока задается в настройках системы, и может превышаться процентов на двадцать, после чего срабатывает защита. В свою очередь ток КЗ для современных силовых модулей настраивается примерно с шестикратным превышением номинала, и может удерживаться таким, иногда до десяти микросекунд за которые должна сработать зашита от КЗ.
|
|
|
|
|
|
|
|
Jun 26 2016, 10:33
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(oleg_d @ Jun 26 2016, 11:45) Так вот значение этого тока задается в настройках системы, и может превышаться процентов на двадцать, после чего срабатывает защита. Это утверждение справедливо для силового привода, для сервоприводов производитель моторов дает гарантированную возможную 150-400% перегрузку по току в течении определенного времени (порядка десятков- сотен миллисекунд). Например для семейства сервоприводов мицубиши (первое что под руку попалось) Код Rated current [A] 5.1 7.1 9.6 16 3.2 6 9 11 17 26 35
Maximum current [A] 15.3 21.3 28.8 48 9.6 18 27 33 51 84 105 Ну и график допустимых режимов выглядит как то так.
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Jun 26 2016, 10:52
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(@Ark @ Jun 25 2016, 07:23) А документация-то где на Ваши изделия? Или ссылка на нее?
С чем предлагаете ознакомиться? Есть только картинки, да Ваши рассказы...
Нет даже полного перечня характеристик...
Несерьезно... Несерьезно, это что то писать не зная, или не понимая ситуацию. Так вот, Вы не у кого из серьезных производителей инверторов (SEVCON, BRUSA, TM4, RMS) никакой документации не получите, до тех пор пока не подпишите договор "NDA". У нас все точно также, по скольку вышеупомянутых пытаемся превзойти по возможно большему количеству параметров. В свою очередь, то что на нас стоит обратить внимание, показываем через спортивные достижения. Кстати очень эффективный способ заявить о себе. Цитата(khach @ Jun 26 2016, 13:33) Это утверждение справедливо для силового привода, для сервоприводов производитель моторов дает гарантированную возможную 150-400% перегрузку по току в течении определенного времени (порядка десятков- сотен миллисекунд) Но это далеко не КЗ. По скольку это все переросло в  предлагаю дальнейшее обсуждение этих вопросов продолжить в моей теме про инверторы.
|
|
|
|
|
|
|
|
Jun 26 2016, 11:48
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(oleg_d @ Jun 26 2016, 12:45) Начнем с того, что нет никакого пускового режима, есть максимальный допустимый крутящий момент вплоть до нулевых оборотов, в свою очередь для создания крутящего момента, через обмотки мотора надо пропустить ток... Начнем с того, что, для того, чтобы сдвинуть" двигатель (мезанизм) с места и, достаточно быстро, разогнать его до нужной скорости, требуется момент, как правило, значительно превышающий, тот момент, который далее потребуется для поддержания и изменения скорости в рабочем режиме. Кратковременную работу с таким повышенным моментом можно назвать "пусковым режимом". Он существует вне зависимости от того, какой мощности у Вас инвертор, какие настройки для него используются, выделяете и обрабатываете Вы этот режим каким-либо особым способом или нет. Цитата(oleg_d @ Jun 26 2016, 13:52) Несерьезно, это что то писать не зная, или не понимая ситуацию... Несерьезно "предлагать ознакомиться" с информацией, доступ к которой невозможно получить. Тем более использовать ее, как доказательство своего "опыта". Типа , "Мы тут ТАКИЕ инверторы делаем, только вам не покажем, Верьте нам на слово"
|
|
|
|
|
|
|
|
Jun 26 2016, 13:39
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(@Ark @ Jun 26 2016, 14:48) Начнем с того, что, для того, чтобы сдвинуть" двигатель (мезанизм) с места и, достаточно быстро, разогнать его до нужной скорости, требуется момент, как правило, значительно превышающий, тот момент, который далее потребуется для поддержания и изменения скорости в рабочем режиме. Кратковременную работу с таким повышенным моментом можно назвать "пусковым режимом". Он существует вне зависимости от того, какой мощности у Вас инвертор, какие настройки для него используются, выделяете и обрабатываете Вы этот режим каким-либо особым способом или нет. В системе есть максимально допустимый крутящий момент, который доступен в широком диапазоне оборотов, а время на которое он доступен определяет то насколько эффективно охлаждение, превышение этих значений может привести к поломкам, например если мотор с постоянными магнитами существует опасность их размагничивания. Теперь скажите зачем какой то период времени называть ("пусковым режимом") если он для системы неотличим от других периодов времени. Цитата Несерьезно "предлагать ознакомиться" с информацией, доступ к которой невозможно получить. Я Вам предложил ознакомится с доступной информацией, про недоступную разговора не было. Цитата Тем более использовать ее, как доказательство своего "опыта". Это Ваши фантазии. Цитата Типа , "Мы тут ТАКИЕ инверторы делаем, только вам не покажем, Верьте нам на слово" От чего же, если имеется конкретный интерес (проект), посмотрите какие у нас по этому поводу достижения, сравните с конкурентами, если наши успехи понравится больше обращайтесь. Ответил сюда ( удалено). Не надо этого делать. Вас тут спрашивали.
Сообщение отредактировал Herz - Jun 26 2016, 15:33
|
|
|
|
|
|
|
|
Jun 26 2016, 15:22
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(oleg_d @ Jun 26 2016, 16:35) В системе есть максимально допустимый крутящий момент, который доступен в широком диапазоне оборотов, а время на которое он доступен определяет то насколько эффективно охлаждение, превышение этих значений может привести к поломкам, например если мотор с постоянными магнитами существует опасность их размагничивания. Все-таки в этой теме отвечу, поскольку обсуждать Ваш конкретный инвертор, по которому нет достаточной информации, у меня нет желания. Уж, извините. Цитата(oleg_d @ Jun 26 2016, 16:35) Теперь скажите зачем какой то период времени называть ("пусковым режимом") если он для системы неотличим от других периодов времени. Затем, что во многих случаях (не во всех,конечно, и, видимо, не в случае Вашего инвертора), этот режим возникает только при старте. Можно, конечно, взять инвертор с достаточным запасом по номинальной мощности (2-х...5-ти кратным), так, чтобы защиты не срабатывали, и забыть об этих проблемах. Однако, это может быть экономически не целесообразно (что, опять же, не Ваш случай). Избыток мощности - денег стоит... Поэтому, предпочтительнее инверторы, которые допускают лишь кратковременный, многократный "перегруз". Микросекунд, как правило, недостаточно. Как здесь, уже отмечали - это десятки-сотни миллисекунд. Впрочем, есть инверторы, где допустимое время "перегруза" измеряется секундами, даже десятками секунд. P.S. Почему стоит это выделить в отдельный режим - алгоритмы работы в нем могут сильно отличаться от рабочего режима.
Сообщение отредактировал @Ark - Jun 26 2016, 16:09
|
|
|
|
|
|
|
|
Jun 26 2016, 16:53
|
Местный
Группа: Свой
Сообщений: 413
Регистрация: 12-05-06
Из: Latvija
Пользователь №: 17 041
|
Цитата(@Ark @ Jun 26 2016, 18:22) поскольку обсуждать Ваш конкретный инвертор, по которому нет достаточной информации, у меня нет желания Укажите где я Вам предлагал обсуждать мой инвертор на этом форуме , поменять тему, в которой это обсуждение не было офтопом, это да. Цитата Затем, что во многих случаях, этот режим возникает только при старте. А что делать с теми многими другими случаями, когда режим возникает ни только при трогание но и в других ситуациях, каждый раз придумывать новое название, или все же назвать тем, как это воспринимает система, то есть режимом максимально допустимого крутящего момента.
|
|
|
|
|
|
|
|
Jun 26 2016, 17:24
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(oleg_d @ Jun 26 2016, 19:53) Укажите где я Вам предлагал обсуждать мой инвертор на этом форуме , поменять тему, в которой это обсуждение не было офтопом, это да. Не предлагали - ну и хорошо... А оффтопа я пока здесь не вижу. Цитата(oleg_d @ Jun 26 2016, 19:53) А что делать с теми многими другими случаями, когда режим возникает ни только при трогание но и в других ситуациях, каждый раз придумывать новое название, или все же назвать тем, как это воспринимает система, то есть режимом максимально допустимого крутящего момента. Дело не в том, как назвать. Не нужно с одними и теми же мерками подходить к устройствам различного назначения, и с различными областями применения.
Сообщение отредактировал @Ark - Jun 26 2016, 19:12
|
|
|
|
|
|
|
 |
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|