| |
 Комбинированное управление BLDC Комбинированное управление BLDC |
|
|
2 страниц  1 2 >
1 2 >
|
 |
Ответов
(1 - 15)
|
|
 Oct 4 2017, 15:03 Oct 4 2017, 15:03
|
Местный

Группа: Участник
Сообщений: 421
Регистрация: 2-01-08
Пользователь №: 33 778

|
Цитата(uriy @ Oct 3 2017, 20:18)  Разве при отказе хотя бы одного датчика холла еще получится работать в области малых оборотов? Меньше одного оборота в минуту.
И особенно стартовать. Не делал такого и не интересовался, точно не скажу, но например, получится безопасно остановиться при отказе на высокой скорости. Отказ (постоянная выдача 0 или 1) одного датчика Холла кажется можно определить и компенсировать даже без дополнительного источника информации о положении. Но на низких оборотах это будет с потерей момента и увеличенной пульсацией, ну и возможным это станет уже после того как нашли неисправный датчик.
|
|
|
|
|
|
|
|
Oct 5 2017, 18:04
|
Местный
Группа: Участник
Сообщений: 421
Регистрация: 2-01-08
Пользователь №: 33 778
|
Цитата(ELEKTROS @ Oct 5 2017, 17:43) amaora, есть алгоритм определения неисправного датчика холла? Допустим их вышло из строя не одни а два, как пропалить такое? Имею ввиду, если есть только три датчика Холла и ничего больше. Алгоритм появится если будет поставлена задача, я только заметил, что есть такая возможность. Надо точно обозначить в каком режиме работает мотор, какие предположения возможны, что называем отказом датчика, и т.д.
|
|
|
|
|
|
|
|
Oct 6 2017, 09:50
|
Местный
Группа: Участник
Сообщений: 294
Регистрация: 29-06-11
Пользователь №: 65 952
|
AlexandrY , ну погодите, что значит асинхронно прокрутить мотор? Допустим мотор приводит в движение подъёмный механизм, что будет, если мотор выпадет из синхронизма во время подъёма груза, в таком случае думаю знаете и хорошо если тормоза удержат. Определить что неисправно в узле датчика положения ротора (ДПР) можно (одинаковый уровень с трёх холлов), а как определить сколько элементов холла вышло из строя, вопрос то именно в этом.
Напрашивается только такой вариант (у меня во всяком случае): знаем время между фронтами ДПР в предыдущем замере и считаем если следующий фронт не наступил через это же время умноженное на коэффициент (коэффициент подбирается в каждом применении привода свой впроль до величины - 0.1), то ошибка этого датчика холла. Также допускаю всякие комбинации этого варианта с двумя другими элементами холла.
amaora, режим повторно кратковременный с пусковыми моментами больше номинального, диапазон регулирования скорости от 0 до номинала, отказ элемента холла - залип в нуле или единице.
Сообщение отредактировал ELEKTROS - Oct 6 2017, 09:53
|
|
|
|
|
|
|
|
Oct 6 2017, 14:05
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(ELEKTROS @ Oct 6 2017, 12:50) AlexandrY , ну погодите, что значит асинхронно прокрутить мотор? Допустим мотор приводит в движение подъёмный механизм, что будет, если мотор выпадет из синхронизма во время подъёма груза, в таком случае думаю знаете и хорошо если тормоза удержат.
amaora, режим повторно кратковременный с пусковыми моментами больше номинального, диапазон регулирования скорости от 0 до номинала, отказ элемента холла - залип в нуле или единице. При работе с холами есть только 6-ь рабочих состояний из 8-и возможных и у каждого состояния есть только два допустимых перехода. Этого более чем достоточно чтобы зафиксировать ошибку. В асинхронном режиме BLDC вполне себе работают. Я видел как лифт с грузом запускали в асинхронном режиме BLDC, без холов и без всяких обратных связей.
|
|
|
|
|
|
|
|
Oct 9 2017, 07:13
|
Местный
Группа: Участник
Сообщений: 294
Регистрация: 29-06-11
Пользователь №: 65 952
|
AlexandrY, синхронный мотор асинхронно работать не может в принципе, наверное вы имеете ввиду так называемое скалярное управление (ковыряю частотник данфос время от времени, и как раз для мотора с постоянными магнитами - режим U/f без датчика), но если разобраться по сути обычный шаговый режим с заданным временем смены шага, но с формированием синусоиды и номинальными токами во всех режимах (будь то холостой ход, будь то нагрузка) чтоб мотор не выпал из синхронизма (КПД в этом случае привода снижается, но всё вроде бы крутиться и работает если не перегружать номинал мотора), но это так отступление. Вопрос конкретнее задам: вы пробовали оценку неиспраности ДПР (причём не останавливая мотор, если остался рабочий хотя бы один из элементов холла) как предлагаете, у себя в каком нибудь изделии?
|
|
|
|
|
|
|
|
Oct 9 2017, 08:00
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
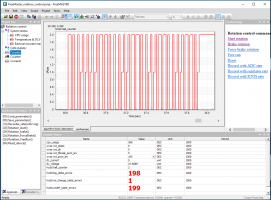
Цитата(ELEKTROS @ Oct 9 2017, 10:13) вы пробовали оценку неиспраности ДПР (причём не останавливая мотор, если остался рабочий хотя бы один из элементов холла) как предлагаете, у себя в каком нибудь изделии? Что такое "ДПР" я не знаю. Но по холлам в моей исследовательской платформе ведется специальная статистика, а не посто фиксируется неисправность. Прямо сейчас у меня на столе движок с неисправным холлом Вот как выглядит его работа в моем отладочном движке
Неисправности холлов очень редко выглядят как простые обрывы или замыкания. Это чаще брак изготовления или дребезг сигналов, который приходится диагносцировать.
|
|
|
|
|
|
|
|
Oct 9 2017, 08:18
|
Местный
Группа: Участник
Сообщений: 294
Регистрация: 29-06-11
Пользователь №: 65 952
|
Датчик положения ротора (ДПР). У себя используем не холлы, а оптические датчики, проблемы похожие и у них. Спрашиваю не просто так - поболтать, меня интересует именно работа с неисправными элементами, а то возможности покрутить на столе у меня редко бывает, а когда привод на объекте там не до этого обычно. Пробывал табличный метод оценки (по сути то о чём вы и говорили), но до ума довести не успел. Код // status_dpr_old - строка,status_dpr - столбец
static int16 table_status[8][8] ={
{ I0, I0, I0, I0, I0, I0, I0, I1 },
{ I0, S, E, P, E, N, E, I1 },
{ I0, E, S, N, E, E, P, I1 },
{ I0, N, P, S, E, E, E, I1 },
{ I0, E, E, E, S, P, N, I1 },
{ I0, P, E, E, N, S, E, I1 },
{ I0, E, N, E, P, E, S, I1 },
{ I0, I1, I1, I1, I1, I1, I1, I1 } Получается всё равно попадаю на одинаковое сочетание в какой то момент (I0, I1), вводить доп. условия по предыдущим состояниям к этому "бутерброду" как-то громоздко кажется. Вот и спрашивал алгоритм может готовый есть.
|
|
|
|
|
|
|
|
Oct 9 2017, 08:45
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(ELEKTROS @ Oct 9 2017, 11:18) Получается всё равно попадаю на одинаковое сочетание в какой то момент (I0, I1), вводить доп. условия по предыдущим состояниям к этому "бутерброду" как-то громоздко кажется. Вот и спрашивал алгоритм может готовый есть. Что-то я не понял. Вы хотите алгоритм для управления мотором в условиях неизвестных отказов датчиков в цепи обратной связи? Либо это абсурд, либо вы неявно предполагаете какой-то узкий круг отказов. Вот с последним я не согласен. Бесполезно предугадывать отказы. Другое дело диагностика отказов. В принципе работа мотора может быть продолжена при одиночных редких сбоях. Но обязательно это надо фиксировать для развития собственной эвристики алгоритма диагностики.
|
|
|
|
|
|
|
|
Oct 9 2017, 14:03
|
Местный
Группа: Участник
Сообщений: 421
Регистрация: 2-01-08
Пользователь №: 33 778
|
Цитата(ELEKTROS @ Oct 6 2017, 12:50) amaora, режим повторно кратковременный с пусковыми моментами больше номинального, диапазон регулирования скорости от 0 до номинала, отказ элемента холла - залип в нуле или единице. Вопрос не так прост, чтобы вот здесь выдать готовый алгоритм. Нужны предположения о движении ротора, чтобы делать прогноз и сравнивать его с показаниями датчиков. Самое простая модель это постоянная скорость вращения, так же задаем скорость роста неопределенности, как долго можно считать скорость постоянной. При известном положении, для каждого датчика Холла можете найти его расчетное состояние. Сравнивая расчетные показания датчиков с реальными, находим невязки и вероятности гипотез об отказе датчиков. Когда датчики переключаются вовремя, невязки имеют малые значения, тогда корректируем расчетное положение ротора на этом переключении. Если переключение произошло не вовремя или не произошло, то соответствующий датчик может перейти в состояние отказа, тогда по нему не корректируем положение, только продолжаем рассчитывать для него невязки и вероятности. Приблизительно так я бы делал, но деталей надо еще много уточнять.
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|