| |
 Несколько бесколлекторных двигателей на 1 вал Несколько бесколлекторных двигателей на 1 вал |
|
|
2 страниц  1 2 >
1 2 >
|
 |
Ответов
(1 - 29)
|
|
 May 11 2018, 17:28 May 11 2018, 17:28
|
Гуру

Группа: Участник
Сообщений: 2 072
Регистрация: 14-01-06
Пользователь №: 13 164

|
Цитата ПО и одинаковое значение положения ротора/скорости ротора Я тоже думал не тему того, что если роторы не будут выставлены синхронно, то возникнут проблемы. Но все же - какая разница одному контроллеру, какое положение ротора в другом моторе? Бесколлекторный двигатель, если я правильно понимаю принцип его работы, просто создает вращающееся магнитное поле, которое "тянет" за собой магниты, не так ли? Мне другой момент еще интересен - если на одном двигателе момент упадет, не получится ли так, что он, подгоняемый другим мотором, перейдет в генераторный режим?
|
|
|
|
|
|
|
|
May 11 2018, 17:37
|
Гуру
Группа: Свой
Сообщений: 5 228
Регистрация: 3-07-08
Из: Омск
Пользователь №: 38 713
|
Цитата(zheka @ May 11 2018, 20:28)  Бесколлекторный двигатель, если я правильно понимаю принцип его работы, просто создает вращающееся магнитное поле, которое "тянет" за собой магниты, не так ли?? Он это поле не "просто создаёт", а должен создавать под углом 90 градусов к полю ротора. Для этого и нужно знать положение ротора. Теперь представьте, что из-за того что значения положения ротора в двух инверторах разные, один формирует поле под углом 200 градусов, а другой - 20 градусов. Куда прикажете крутиться ротору? Цитата(zheka @ May 11 2018, 20:28) Мне другой момент еще интересен - если на одном двигателе момент упадет, не получится ли так, что он, подгоняемый другим мотором, перейдет в генераторный режим? А почему он упадёт-то? ПО одинаковое, коэффициенты всех ПИД-ов и пр. - тоже одинаковое, задание требуемого момента на оба инвертора тоже естественно должно быть одинаковое. Почему тогда "упадёт"?
|
|
|
|
|
|
|
|
May 11 2018, 17:55
|
Гуру
Группа: Участник
Сообщений: 2 072
Регистрация: 14-01-06
Пользователь №: 13 164
|
Так, на всякий случай, для чего это нужно. Это на крупную судомодель. А причин для такого соосного расположения двигателей две. 1. Хочется надежности - сгорел один контроллер, ну или обмотка двигателя, не дай бог - работают остальные. 2.Большие сложности с расчетом необходимой мощности двигателя. Определяться это будет опытным путем. И чтобы этот путь не был дорогостоящим, чтобы не пришлось, если не подойдет, менять один дорогой двигатель на другой, еще более дорогой, хочется при необходимости просто добавить еще один двигатель на вал. Есть конечно и механический вариант - подключать через обгонные муфты, но... не очень он мне нравится. Во.... что-то вроде этого undefined
|
|
|
|
|
|
|
|
May 11 2018, 17:56
|
Знающий
Группа: Участник
Сообщений: 926
Регистрация: 9-08-15
Пользователь №: 87 913
|
Цитата(zheka @ May 11 2018, 22:14) Представьте себе - два обычных бесколлекторных двигателя, типа тех, что сейчас активно используют моделисты.
Из них выбиваются валы и вставляется один общий длинный вал.
У каждого двигателя свой контроллер.
Будут ли какие проблемы или же двигатели будут работать рука об руку и складывать свои мощности? На сколько я знаю - эти модельные движки - БЕЗ датчиков Холла и на очень большие обороты... Контроллер следит за положением ротора контролируя ЭДС на не подключенной в данный момент фазе... Но - не суть как - по идее, если у каждого двигателя СВОЙ контроллер, то управление обоими двигателями будет правильным... Для двигателей с датчиками Холла - вообще проблем нет - там управление в любом случае будет правильным... По сути - двигателям будет казаться, что нагрузка на них снизилась вдвое... Момент, по моим ощущениям, должен вырасти вдвое...( ну почти...  ).
Сообщение отредактировал варп - May 11 2018, 17:57
|
|
|
|
|
|
|
|
May 11 2018, 18:20
|
Знающий
Группа: Участник
Сообщений: 926
Регистрация: 9-08-15
Пользователь №: 87 913
|
Цитата(zheka @ May 12 2018, 00:01) ..
.....Но в силу разброса параметров для одной такой пары 50% PWM - это 100 об/мин, а для другого - 101 об/мин. Не будет ли первая пара тормозить вторую? ...zheka, никто никого тормозить НЕ будет.... Забудьте про обороты в минуту - здесь это не важно.... Поясню на пальцах - представьте - Вы едете по дороге БЕЗ уклона на велосипеде с BLDC.... Скорость при данном PWM , допустим = 10 Км/ч..... И вот дорога пошла в ГОРУ .... Что произойдёт? Ваш PWM ("газ") - ПРЕЖНИЙ ( Вы НЕ меняли)... Нагрузка на двигатель ВОЗРАСТЁТ, скорость велосипеда - СНИЗИТСЯ.... Но, правильная работа BLDC НЕ нарушиться..., так как он будет продолжать менять фазы ориентируясь по-прежнему на датчики Холла.... Он будет ехать даже если гора станет очень крутой, даже со скоростью 0,1 Км/час...., пока ему хватает сил хоть как-то крутить колесо.... То есть - PWM и число оборотов под нагрузкой связаны ну очень условно... Два BLDC в связке, с немного РАЗНЫМИ напряжениями поданными на них ( читай - с разными PWM ), будут вносить чуть разный вклад в суммарный момент....
Сообщение отредактировал варп - May 11 2018, 18:26
|
|
|
|
|
|
|
|
May 11 2018, 18:26
|
Гуру
Группа: Свой
Сообщений: 5 228
Регистрация: 3-07-08
Из: Омск
Пользователь №: 38 713
|
Цитата(варп @ May 11 2018, 20:56) На сколько я знаю - эти модельные движки - БЕЗ датчиков Холла и на очень большие обороты... Контроллер следит за положением ротора контролируя ЭДС на не подключенной в данный момент фазе... Использовать бездатчиковое управление для такой серьёзной задачи как у автора - это мягко говоря легкомысленно. Кроме датчиков Холла существует куча других вариантов определения положения, гораздо лучше чем д.Холла. Ресольвер например. Цитата(zheka @ May 11 2018, 21:01) Но в силу разброса параметров для одной такой пары 50% PWM - это 100 об/мин, а для другого - 101 об/мин. Не будет ли первая пара томозить вторую? А зачем Вы их разбросали? Эти параметры. Не разбрасывайте и всё будет ок.
|
|
|
|
|
|
|
|
May 11 2018, 18:29
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(zheka @ May 11 2018, 20:28) Мне другой момент еще интересен - если на одном двигателе момент упадет, не получится ли так, что он, подгоняемый другим мотором, перейдет в генераторный режим? Да, перейдет в генераторный режим. И это вам грозит как минимум перегревом конденсаторов контроллера и как максимум пробоем в силовых драйверах. Впрочем перегрев конденсаторов даже опасней потому как будет неприятный взрыв электролитов. Для такой схемы надо делать специальные контроллеры с балансировкой токов между собой.
|
|
|
|
|
|
|
|
May 11 2018, 18:32
|
Гуру
Группа: Модераторы
Сообщений: 3 868
Регистрация: 15-03-13
Пользователь №: 76 048
|
Только не нужно выбивать валы! Достаточно велик риск, что испортите сразу два двигателя.
Просто соедините их через эластичную муфту или еще как. Мощности преспокойно просуммируются.
Контроллеры тут вообще ни при чем. Скорость и момент в одиночном двигателе непостоянны и зависят от нагрузки. Ну, уменьшилась нагрузка, возрастут обороты.
Каждый двигатель сам себе автоматически выберет режим.
Немного не очевидно по поводу генераторного режима... Проверните вал, генерирует двигатель? Полярность та же? Но чтобы он отдавал наружу какую-то мощность нужно чтобы обороты генератора были ВЫШЕ, чем вращающего его двигателя. Этого в принципе быть не может, валы соединены жестко.
Короче, "этого не может быть, потому что не может быть никогда". "Генераторный" просто отберет на себя некоторую механическую мощность холостого хода, т.н. вентиляторные потери. Иначе существовал бы вечный двигатель.
|
|
|
|
|
|
|
|
May 11 2018, 18:35
|
Знающий
Группа: Участник
Сообщений: 926
Регистрация: 9-08-15
Пользователь №: 87 913
|
Цитата(mantech @ May 12 2018, 00:27) Там вентильные двигатели и в них нет датчиков Холла. .... mantech, в данном случае - не важно, каким образом контроллер определяет положение ротора....- результат -то одинаковый... Просто с Холлами легче понять, как чего булькает... ------------- А делить моменты РОВНО поровну - особого смысла нет ... - ну, буду моменты отличаться на 5%.... , и что...
Сообщение отредактировал варп - May 11 2018, 18:40
|
|
|
|
|
|
|
|
May 11 2018, 18:47
|
Профессионал
Группа: Свой
Сообщений: 1 123
Регистрация: 8-03-09
Из: Днепр
Пользователь №: 45 848
|
Цитата(jcxz @ May 11 2018, 21:11) С чего это? Считаете, что 2*2 в одном инверторе и такая же операция в другом инверторе приведут к разным результатам?  Не, 2*2 сомнению не подвергается. Не имеем таких амбиций. Я в смысле распределения нагрузки на первый двигатель и второй. Если между первым и вторым двигателем на валу будет измеряться момент (виртуально). Как один из двигателей "узнает" что надо немного "дожать" или "отпустить" ? И какое оптимальное соотношение %, 50/50, 1/99 ? Как его обеспечить ? IMHO.
|
|
|
|
|
|
|
|
May 11 2018, 19:09
|
Гуру
Группа: Свой
Сообщений: 5 228
Регистрация: 3-07-08
Из: Омск
Пользователь №: 38 713
|
Цитата(k155la3 @ May 11 2018, 21:47) Я в смысле распределения нагрузки на первый двигатель и второй. Если между первым и вторым двигателем на валу будет измеряться момент (виртуально).
Как один из двигателей "узнает" что надо немного "дожать" или "отпустить" ? И какое оптимальное соотношение %, 50/50, 1/99 ? Как его обеспечить ? Каждый из инверторов измеряет токи в фазах своего двигателя. Из этих токов вычисляет токи q и d (используя данные о положении ротора). Определяет величины ошибок по этим токам (вычитая их из заданных q и d (которые подаются одинаковыми на все инверторы)). Сигналы ошибок пропущенные через ПИД-регуляторы преобразуются в управляющие напряжения ШИМ (используя данные о положении ротора и о скорости вращения). Величина q как раз и создаёт момент. Да, она может быть немного разной на разных инверторах (из-за того, что каждый инвертор измеряет фазные токи в своём моторе). Ну и что? В конце концов эти два тока (q и d) должны сформировать одно магнитное поле равное их векторной сумме. Пускай в каждом моторе это поле немного отличается от другого. Но я думаю что можно просуммировать эти магнитные поля во всех моторах и получится общее магнитное поле с величиной и углом равным векторной сумме всех его составляющих. Вот этим суммарным виртуальным магнитным полем и будет определяться вращение общего ротора. PS: автор даже не указал - чем именно собирается управлять в своей системе: моментом или скоростью?
|
|
|
|
|
|
|
|
May 12 2018, 01:14
|
Знающий
Группа: Участник
Сообщений: 926
Регистрация: 9-08-15
Пользователь №: 87 913
|
Ребята, напомню - Цитата(zheka @ May 11 2018, 22:14) Представьте себе - два обычных бесколлекторных двигателя, типа тех, что сейчас активно используют моделисты.
Из них выбиваются валы и вставляется один общий длинный вал.
У каждого двигателя свой контроллер.
Будут ли какие проблемы или же двигатели будут работать рука об руку и складывать свои мощности? ... то есть - НЕ стояло пока никаких задач ни контроля за скоростью, ни за моментом, ни за фазными токами... Говорить про ПИД, про зоны устойчивости - преждевременно... Вот, чтобы лишнее пока не фантазировать - надо представить пока, что два ОДИНАКОВЫХ КОЛЛЕКТОРНЫХ двигателя ( они, по сути не отличаются от бесколлекторных) крутят общую нагрузку питаясь одинаковым напряжением...Полагаю - здесь нет условий для возникновения неустойчивости и колебаний...
Сообщение отредактировал варп - May 12 2018, 02:57
|
|
|
|
|
|
|
|
May 12 2018, 06:35
|

Знающий
Группа: Модераторы
Сообщений: 925
Регистрация: 25-01-09
Из: Рига
Пользователь №: 43 909
|
Цитата(zheka @ May 11 2018, 20:55) Так, на всякий случай, для чего это нужно. Это на крупную судомодель. А причин для такого соосного расположения двигателей две.
1. Хочется надежности - сгорел один контроллер, ну или обмотка двигателя, не дай бог - работают остальные.
2.Большие сложности с расчетом необходимой мощности двигателя. Определяться это будет опытным путем. И чтобы этот путь не был дорогостоящим, чтобы не пришлось, если не подойдет, менять один дорогой двигатель на другой, еще более дорогой, хочется при необходимости просто добавить еще один двигатель на вал. 1. Правильные обмотки и контроллеры не горят. 2. Нет никаких сложностей с расчетом мощности.
|
|
|
|
|
|
|
|
May 12 2018, 07:15
|
Знающий
Группа: Участник
Сообщений: 926
Регистрация: 9-08-15
Пользователь №: 87 913
|
Цитата(jcxz @ May 12 2018, 10:23) ...
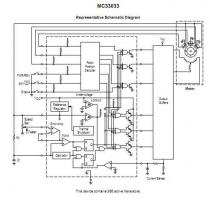
Или Вы знаете какие-то другие методы управления PMSM (формирования нужной диаграммы питающих напряжений на обмотках) без задания момента или скорости? Так поделитесь с сообществом! jcxz, Вы хотите на год в этой теме зависнуть? Отвечу коротко - бесколлекторный двигатель отличается от коллекторного отсутствием коллектора и щёток. В бесколлекторном двигателе постоянного тока коммутацию фаз осуществляют три верхних и три нижних силовых ключа. За текущим положением ротора следит контроллер посредством трёх датчиков Холла. Логика подключения фаз напрямую связана с текущими сигналами с датчиков Холла. Частота оборотов бесколлекторного двигателя на холостом ходу ( как и коллекторного) прямо пропорциональна питающему напряжению. Для регулировки оборотов можно регулировать питающее напряжение посредством PWM.... Организовать управление можно и без датчиков Холла... - контролируя индуцированное напряжение на неподключенной в данный момент фазе... Но такое управление создаёт трудности при старте...- ещё нет индуцированного напряжения... https://www.google.ru/search?newwindow=1&am.....0.IXEUvO7GGyA Логику работы контроллера можно рассмотреть на примере MC33033...( по datasheet, конечно...).
|
|
|
|
|
|
|
|
May 12 2018, 08:48
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(варп @ May 12 2018, 10:15) jcxz, Вы хотите на год в этой теме зависнуть? Отвечу коротко - бесколлекторный двигатель отличается от коллекторного отсутствием коллектора и щёток. Ребят, хорош флудить. У бесколлекторных двигателей есть куча разных алгоритмов управления : 6-шаговая коммутация с разными модуляциями, векторное с кучей эстиматоров, с обратной связью по скрости и моменту и без, c PID-ами, с линейными предсказателями, с нелинейными предсказателями и т.д. и т.п.. Когда вы копипастите свои мудрые мысли из гугла указывайте точно про какой тип управления ведете речь.
|
|
|
|
|
|
|
|
May 12 2018, 09:12
|
Гуру
Группа: Свой
Сообщений: 5 228
Регистрация: 3-07-08
Из: Омск
Пользователь №: 38 713
|
Цитата(варп @ May 12 2018, 10:15) За текущим положением ротора следит контроллер посредством трёх датчиков Холла. Логика подключения фаз напрямую связана с текущими сигналами с датчиков Холла.
Частота оборотов бесколлекторного двигателя на холостом ходу ( как и коллекторного) прямо пропорциональна питающему напряжению. Для регулировки оборотов можно регулировать питающее напряжение посредством PWM.... Очень поверхностное представление о работе PMSM....  д.Холла или бездатчиковое управление - всего лишь частные случаи определения положения ротора. Датчиков угла поворота ротора есть много разных. Цитата(AlexandrY @ May 12 2018, 11:48) Когда вы копипастите свои мудрые мысли из гугла указывайте точно про какой тип управления ведете речь. Я вообще-то всего-лишь указал, что топик-стартер не указал даже тип управления, который используется в его инверторах (см. сообщение 20). Без чего разговор - ни о чём. Может он вообще там синусы будет подавать? PS: А свои измышления насчёт гугла - оставьте при себе.
|
|
|
|
|
|
|
|
May 12 2018, 09:23
|
Знающий
Группа: Участник
Сообщений: 926
Регистрация: 9-08-15
Пользователь №: 87 913
|
Цитата(AlexandrY @ May 12 2018, 14:48) Ребят, хорош флудить.
У бесколлекторных двигателей есть куча разных алгоритмов управления : 6-шаговая коммутация с разными модуляциями, векторное с кучей эстиматоров, с обратной связью по скрости и моменту и без, c PID-ами, с линейными предсказателями, с нелинейными предсказателями и т.д. и т.п..
.... AlexandrY, а Ваши посты - не флуд? Мы рады за Ваши глубокие знания..., но ТС от этого какой прок, если Вы этими знаниями не делитесь? А в этой теме, уже достаточно инфы, чтобы сделать нужные выводы, или, как минимум, пойти в нужном направлении... И тема, вроде, не очень сложная, однако с нуля - год будешь разбираться...
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|