| |
 Токовое управление Brushed DC motor Токовое управление Brushed DC motor, Нужна критика, критика и еще раз критика схемы |
|
|
|
|
 Aug 17 2009, 00:59 Aug 17 2009, 00:59
|

Познающий...

Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125

|
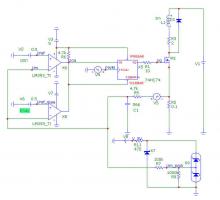
Здравствуйте! Решил внедрить токовое управление коллекторным двигателем постоянного тока. Идея - задать два порога тока. Один из них (Imax) максимально-допустимое значение тока через обмотку двигателя. Второе (Ictrl) - рабочее значение тока, т.е. то, которое будет использоваться в качестве силы, крутящей ротор и задающей ускорение. Согласно этому уравнению: I*k = d^2/dt^2 (Theta)*J + d/dt (Theta)*b, где: I - сила тока через обмотку ротора, k - постоянная двигателя, Theta - положение ротора, b - коэффициент динамического трения. Токи задаются напряжениями (батарейки на схеме) и подаются на компараторы. Также, на компараторы заведена обратная связь по току с шунта двигателя. Таким образом, ток через обмотку ротора постоянно сравнивается с заданными рабочим и максимальным. В превышения одного из них, на выходе одного или обоих компаратор будет низкий уровень. Т.к. эти компараторы с открытым коллектором, то соединение их выходов допустимо. Выходы компараторов подключены на входы сброса с данных D-триггера. При очередном тактовом импульсе (PWM) этот низкий уровень будет записан на выход триггера и MOSFET не откроется. Если ток превысил одно из значений уже после переднего фронта сигнала PWM, то триггер сбросится по входу сброса. Т.е. ограничение тока работает всегда. Также, при новом переднем фронте импульса PWM, если ток двигателя в норме, то высокий логический уровень запишется по входу данных на выход триггера и MOSFET откроется. Частота PWM 8 КГц. Заполнение (длина импульса) не играет роли, т.к. запись в триггер происходит только по переднему фронту. Важен лишь период. Для подавления помех использован пассивный ФНЧ. Нижняя часть схемы (сборка на диодах Шоттки) представляет собой защиту входа АЦП микроконтроллера на тот случай, если потребуется измерение тока. Как следует из описание и теории, схема должна управлять ускорением двигателя, а значит и скоростью и положением. Есть сомнения, не будет ли мешать противо ЭДС? Как мне раньше говорили здесь на форуме - не должна.Также имеются сомнения по поводу фильтра. Вдруг возникнут помехи, которые он не подавит, и тогда все управление сломается? Ну и самое главное сомнение - верна ли идея? Спасибо заранее за все ответы!
Эскизы прикрепленных изображений
--------------------
Выбор.
|
|
|
|
|
|
2 страниц  1 2 >
1 2 >
|
 |
Ответов
(1 - 19)
|
|
Aug 17 2009, 04:07
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(haker_fox @ Aug 17 2009, 04:59)  Здравствуйте! Решил внедрить токовое управление коллекторным двигателем постоянного тока. Идея - задать два порога тока.
Ну и самое главное сомнение - верна ли идея?
Спасибо заранее за все ответы! Про токовую обратную связь - давно пора. А вот реализация идеи - не очень. Я уже ж писала (кажется, Вам..), что нужно разность ток-задатчик интегрировать интегратором. Так мне видится... Может, старшие товарищи меня поправят....
|
|
|
|
|
|
|
|
Aug 18 2009, 08:49
|
Местный
Группа: Свой
Сообщений: 426
Регистрация: 5-04-07
Из: Санкт-Петербург
Пользователь №: 26 782
|
Цитата(haker_fox @ Aug 17 2009, 04:59) Как следует из описание и теории, схема должна управлять ускорением двигателя, а значит и скоростью и положением.
Ну и самое главное сомнение - верна ли идея? Ваша схема реализует ОС по току и только. Если вы хотите управлять скоростью и положением, то необходимы внешние по отношению к контуру тока контура управления соответственно скорости и положения. Представьте себе случай, когда Ваш двигатль работает на холостом ход. Ваша схема поддерживает в якоре постоянный ток следовательно двигатель развивает постоянный момент получаем постоянное ускорение и неограниченное линейное нарастание скорости. Идея Ваша с ОС по току верна, но для создания работоспособного привода недостаточна. Посмотрите в сторону систем подчиненного управления систем электропривода. Там подробно изложено когда контур тока необходим, а когда без него можно обойтись, а также как правильно его настроить. Автор, если память не изменяет, Башарин.
|
|
|
|
|
|
|
|
Aug 19 2009, 01:20
|
Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
Цитата(VladimirYU @ Aug 18 2009, 17:49) Ваша схема реализует ОС по току и только. Если вы хотите управлять скоростью и положением, то необходимы внешние по отношению к контуру тока контура управления соответственно скорости и положения. Конечно, эти обратные связи предполагаются. Это будет энкодер, по нему можно определить скрость и положение. Цитата(VladimirYU @ Aug 18 2009, 17:49) Представьте себе случай, когда Ваш двигатль работает на холостом ход. Ваша схема поддерживает в якоре постоянный ток следовательно двигатель развивает постоянный момент получаем постоянное ускорение и неограниченное линейное нарастание скорости. Ага. Правда скорость при этом когда-то все равно перестанет расти) Т.е. когда I*k будет равно b * dTheta/dt. Если же серьезно, то при достижении заданной скорости, мы должны полностью выключить двигатель, задав опору Ictrl = 0. Когда скорость упадет ниже заданной - включить. Получается ШИМ, о котором мне говорила уважаемая Tanya. Этот контур может управляться ПИ(Д) регулятором. А вот контур положения - только П(Д) регулятором, т.к. интегрирующее звено имеется (положение - интеграл от скорости). Передаточная функция скорости от тока будет: Код sTheta(s) / I(s) = k / (Js + B) , а положения от тока: Код Theta(s) / I(s) = k / s(Js + B) . Таким образом мы действительно видим, что у нас появляется интегрирующее звено 1/s. Но это пока так, теория) Цитата(VladimirYU @ Aug 18 2009, 17:49) Идея Ваша с ОС по току верна, но для создания работоспособного привода недостаточна. Слава Всевышнему, что идея верна! На счет недостаточности - да, конечно. Это так. Но контуры я планировал добавить. Цитата(VladimirYU @ Aug 18 2009, 17:49) Посмотрите в сторону систем подчиненного управления систем электропривода. Там подробно изложено когда контур тока необходим, а когда без него можно обойтись, а также как правильно его настроить. Автор, если память не изменяет, Башарин. Башарин есть. Действительно интересно пишет и хорошо излагает теорию. Правда ее тяжеловато читать) Ну ничего, а что делать?) Будем читать. Спасибо!
--------------------
Выбор.
|
|
|
|
|
|
|
|
Sep 2 2009, 16:55
|
Частый гость
Группа: Свой
Сообщений: 185
Регистрация: 5-05-06
Из: Ekaterinburg, Russia
Пользователь №: 16 821
|
Мы используем такую систему управления двигателем (контур по скорости, охваченный контуром по положению):
Но тоже хочется попробовать замкнуть контур по току. Если Ваш опыт пройдет удачно, опишите, пожалуйста, результаты (желательно отличие характеристик от системы без токового контура). Еще вопрос: Вы используете аналоговую систему управления или цифровую? Насчет противоЭДС - по идее она уменьшает потребляемый двигателем ток на больших оборотах, так что мешать не должна, наоборот.. С фильтром интереснее - да, если на выходе усилителя стоит фильтр, то уровень помех заметно снижается, но сильного улучшения характеристик мы не наблюдали. Возможно дело в некачественной развязке общих, надо выяснять.
--------------------
Чудес не бывает - бывает мало знаний и опыта!
|
|
|
|
|
|
|
|
Sep 3 2009, 00:49
|
Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
Цитата(Yura_K @ Sep 3 2009, 01:55) Если Ваш опыт пройдет удачно, опишите, пожалуйста, результаты (желательно отличие характеристик от системы без токового контура). Отпишу, но неизвестно когда. Много работы акромя двигателя) Цитата(Yura_K @ Sep 3 2009, 01:55) Мы используем такую систему управления двигателем (контур по скорости, охваченный контуром по положению):
Еще вопрос: Вы используете аналоговую систему управления или цифровую? Цифровую. Цитата(Yura_K @ Sep 3 2009, 01:55) Мы используем такую систему управления двигателем (контур по скорости, охваченный контуром по положению):
Насчет противоЭДС - по идее она уменьшает потребляемый двигателем ток на больших оборотах, так что мешать не должна, наоборот.. Это на холостых оборотах противоЭДС почти равна напряжению, поданному на двигатель. А вот при приложенной нагрузке из-за момента инерции, трения, вал будет вращаться на меньшей по сравнению с холостой скоростью. Следовательно, напряжение (питания - противоЭДС) / R = ток потребления, будет больше. Это для установившегося режима (принебрег Ldi/dt). Цитата(Yura_K @ Sep 3 2009, 01:55) Мы используем такую систему управления двигателем (контур по скорости, охваченный контуром по положению):
С фильтром интереснее - да, если на выходе усилителя стоит фильтр, то уровень помех заметно снижается, но сильного улучшения характеристик мы не наблюдали. Возможно дело в некачественной развязке общих, надо выяснять. Есть мысль применить активный ФНЧ более, чем первого порядка. Пока непонятно Баттерворда, Чебышева или др. Проспайсить это все и сравнить. Благо spice модель движка недавно нашел.
--------------------
Выбор.
|
|
|
|
|
|
|
|
Sep 8 2009, 05:06
|
Местный
Группа: Участник
Сообщений: 227
Регистрация: 13-04-07
Пользователь №: 27 018
|
думаю сервопривод.. вот загвоздка.. на чем реализовать датчик тока .. либо что нить от Аллегро типа - http://www.terraelectronica.ru/pdf/ALLEGRO/ACS750SCA-075.pdfлибо мудрить самому на мощном шунте.. сопртивлением порядка 0.02-0.01 Ом... ваши мысли?
|
|
|
|
|
|
|
|
Sep 8 2009, 14:01
|
Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
Цитата(Duhas @ Sep 8 2009, 14:06) думаю сервопривод.. вот загвоздка.. на чем реализовать датчик тока .. либо что нить от Аллегро типа - http://www.terraelectronica.ru/pdf/ALLEGRO/ACS750SCA-075.pdfлибо мудрить самому на мощном шунте.. сопртивлением порядка 0.02-0.01 Ом... ваши мысли? Насколько я знаю, датчик Холла будет работать только на переменном токе. Следовательно, вопрос: у Вас движок переменкой питается? А вообще, почитайте прикрепленный документ, как мне кажется, он заслуживает внимания.
--------------------
Выбор.
|
|
|
|
|
|
|
Guest_TSerg_*
|
Sep 16 2009, 14:39
|
Guests
|
Однозначно для начала почитать о САР ( системах автоматического регулирования ).
А далее начинать не с принципиальных схем, а с расчетов - тогда и проблем будет меньше.
|
|
|
|
|
|
|
Guest_TSerg_*
|
Sep 22 2009, 12:59
|
Guests
|
Цитата(Duhas @ Sep 21 2009, 21:24) ну о САР я наслышан, хотелось бы услышать мнение тех, кто применял подобные вещи в подобных устройствах.. но видимо с этим тут глухо..
с расчетов чего следует начинать когда разрабатывается сервопривод для произвольных ДПТ ? Да нет - совсем не глухо. Вы увидели что-то необычное в системе подчиненного регулирования ? Может просто не осведомлены об этом ? Начинать надо, как и обычно, с теории - расчет электропривода на основе ТЗ. Не думаю, что тут найдутся желающие излагать основы проектирования электропривода на форуме. Берите книжки и читайте, Башарина Вам уже рекомендовали, еще их масса есть. - определение характеристик нагрузки - выбор двигателя по мощности и нагреву - расчет САР на основе точностных и режимных характеристик из ТЗ ( статика и динамика) в т.ч. выбор контуров регулирования, обеспечение устойчивости и т.п. - моделирование - проверка Что же касается использования контура тока в принципе (положительная ОС), то он применятеся прежде всего для управления жесткостью характеристик в комбинации ток-напряжение, ток-скорость или двухконтурные САР ( подчиненное регулирование ). Путем управления передаточными характеристиками ( нелинейность, отсечка и пр ) можно формировать разнообразные по форме механические характеристики, вплоть до "экскаваторных".
|
|
|
|
|
|
|
Guest_TSerg_*
|
Sep 23 2009, 07:08
|
Guests
|
Цитата(Duhas @ Sep 22 2009, 18:44) повторюсь - ТЗ как такового не существует... собирается нечто вроде стенда, для практически любого ДПТ... Если, что - ТЗ Исполнитель пишет сам себе  По ГОСТ-у Так, что не составляет труда "нарисовать" самому себе круг требований и ограничений. "Практически любой ДПТ" - это может быть, начиная от ДПМ до многокиловатного привода прокатного стана. Не может быть универсального стенда для "любого" ДПТ. Опять же испытание привода без реальной нагрузки или ее модели - кому оно надо. Я плохо представляю себе стенд с возможностью задания любого встречающегося в практике типа нагрузки. Так, что и здесь наверняка есть ( известна ) область применения. P.S. Примеры отработки пусковых и нагрузочных режимов на условном ДПТ с той или иной САУ или без.  Прямой пуск без обратных связей Wo = 160 рад/c; М1 = 1 Н*м; Id = 1.5 A;  Прямой пуск без обратных связей + наброс нагрузки М4 = 4 Н*м Wo = 93 рад/c; М = М1 + М4 = 5 Н*м; Id = 5.8 A; Im = 14 A Как видим, характеристика двигателя довольно мягкая и просадка скорости составила 42% Кратность пускового тока довольно высокая Ki = Im/Id = 2.4  Прямой пуск +ООС по току с отсечкой + наброс нагрузки М4 = 4 Н*м Wo = 93 рад/c; М = М1 + М4 = 5 Н*м; Id = 1.5 A; Im = 8.5 A Кратность пускового тока уменьшена Ki = Im/Id = 1.5  Обратная связь по скорости Wo = 155.7 рад/c; М1 = 1 Н*м; Id = 1.4 A; Im >> Id + наброс нагрузки M4 = 4 Н*м Wo = 154.9 рад/c; М = М1 + М4 = 5 Н*м; Id = 5.86 A; Im >> Id Характеристика системы жесткая ( погрешность поддержания скорости при возмущающих воздействиях не более 0.5% Кратность тока недопустимо высока.  Обратная связь по скорости + ООС по току с отсечкой + наброс нагрузки Wo = 154.9 рад/c; М = 5 Н*м; Id = 5.86 A; Im = 9 А Ki = 1.6 Т.е. получаем высокоточный привод + ограничение пусковых токов.  Для любителей ПИД регулятора + ООС по току с отсечкой имеем Скорость при М1=1 Н*м W1 = 156.9 рад/с Скорость при набросе нагрузки W2 = 156.6 рад/с Статическая погрешность снизилась с 0.5% до 0.2 % и кроме того, уменьшены погрешности в переходных режимах ( пуск и наброс нагрузки). P.S. На токовых графиках пульсации тока - это не погрешность расчета. В модельную схему вставлен тиристорный источник питания ( однофазный полно-управляемый мост, частота сети 50 Гц ). Именно поэтому от R-датчика тока ( нет дополнительной фильтрации ) получаем небольшую пульсацию сигнала. Как заметно, она не мешает процессу регулирования. Возможно "легкая" фильтрация сигнала от датчика не помешает. P.P.S. Хэх.. Сейчас посмотрел - оказывается модель датчика тока сделал апериодическим звеном с постоянной времени 5 мс.
|
|
|
|
|
|
|
Guest_TSerg_*
|
Sep 23 2009, 11:02
|
Guests
|
Цитата(Duhas @ Sep 23 2009, 12:24) ну на счет практически любого я несколько загнул на самом деле )
допустим ДПТ с номинальным током до 30-40А и номинальным напряжением до 100В Если это учебный стенд, то важнее знание энерго-конструктивных параметров того, чего будем испытывать. Ну и как моделировать нагрузки разного рода: трение ( сухое, вязкое ), люфты, вентиляторная нагрузка, упругая нагрузка и пр. Цитата(Duhas @ Sep 23 2009, 12:24) на ваших картинках неплохо бы студентов учить ) у наших преподов с этим похуже, кстати, откуда картинки ? Если надо - нарисую еще На самом деле вместо стенда давно пора пользоваться моделями двигателей и нагрузок, преобразователей и тп. И симуляторами динамических систем ! А вот потом, потом может быть и реальный стенд для проверки на-проектированного и с-моделированного. Картинки привел с реального симулятора - модельки сделал специально для Вас. Времени 30 мин мне не жалко на обучающий момент Симулятор динамических систем VisSim. Рекомендую. Есть студенческая версия: http://www.vissim.nm.ru/download.htmlhttp://model.exponenta.ru/download.htmlhttp://books.net-soft.ru/vissim.htmhttp://www.kodges.ru/46488-vissimmathcadma...aticheskoe.htmlЕще наш отечественный от Бауманского: Учебная версия: http://energy.power.bmstu.ru/mvtu/Описание http://model.exponenta.ru/bt/bt_cont_2_MBT.html#L2Успеха в учебе и помощи учащимся. P.S. Если, что - задавайте вопросы. Помогу, чем смогу.
|
|
|
|
|
|
|
Guest_TSerg_*
|
Sep 23 2009, 12:26
|
Guests
|
Цитата(Duhas @ Sep 23 2009, 15:34) спасибо за информацию ) вопросы я думаю еще всплывут )
вообще я делаю сам привод ) т.е. электронику... регуляторы будут на МК.. по идее задача - рассмотреть принципы управлению ДПТ + пример схемотехники драйвера + изучение МК... каждому моменты уделить много времени никак не получится.. ни мне сейчас, ни студентам, которые, возможно, будут данным устройством пользоваться... я сам собсно еще студент ) На самом деле, если говорить об относительно примитивных САУ, то разницы между аналогом и цифрой практически нет. Ведь когда не было ЦВМ - были АВМ и чего только на них не решалось. А до этого были механические вычислители и можете не верить, но именно на них началось практическое использование рядов Фурье ( предсказание приливов, поскольку это была очень важная практическая задача) Поэтому не надо ставить во главу угла - "у меня цифра". Надо проектировать привод системно, реализация может быть разной. Насчет Вашего "студенчества" - я понял, но ведь не боги горшки обжигают ? Нас учили в уже далекие 70-е быть Инженерами.. Сначала в ВУЗ-е, потом на производстве.. Мы ими стали, поверьте. Вот и глядя на молодых студентов, хочется видеть в вас наших преемников. Пробуйте. Сделал дополнительные пояснения к графикам.
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|