| |
 Температурная компенсация микромеханического гироскопа Температурная компенсация микромеханического гироскопа, mpu6050 |
|
|
|
|
 Jul 26 2012, 11:03 Jul 26 2012, 11:03
|
Участник

Группа: Участник
Сообщений: 71
Регистрация: 18-01-06
Пользователь №: 13 333

|
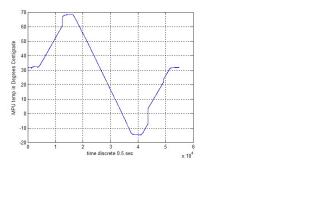
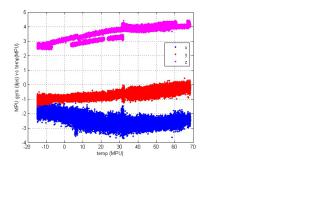
По результатам климатических испытаний датчика invensense mpu6050 возникли вопросы. Собственно как компенсировать смещение нуля при изменении температуры и вообще как правильно это делать, на какой диапазон температур можно рассчитывать при эксплуатации этого датчика для инерциального измерения углов? По даташиту ZRO (zero rate output) на всем диапазоне температур +-20 градусов в секунду. У меня получился результат лучше, видимо производитель перестраховывается. Но данных о характере изменения ZRO в даташите не дает. Но встроенный датчик температуры присутствует именно для задачи компенсации смещения нуля. Еще на графике угловой скорости от температуры присутствует гистерезис. У AD находил информацию, что с гистерезисом вообще никак не поборешься, потому как это свойство самой микромеханики и гистерезис будет иметь место даже если гироскоп не работает, а лежит на складе где плавает температура. На первом графике изменение температуры от времени (количества отсчетов), для ориентации полочки с выдерживанием температуры примерно 30 минут. Две ступеньки это пропадание записи. На втором смещение нуля гироскопа от температуры.
|
|
|
|
|
|
|
 |
Ответов
|
|
Jul 27 2012, 08:48
|
Участник
Группа: Участник
Сообщений: 71
Регистрация: 18-01-06
Пользователь №: 13 333
|
Цитата(Ruslan1 @ Jul 26 2012, 15:38)  У гугла спрашивали? https://answers.launchpad.net/freeimu/+question/190177По опыту общения с мемсами: сдвижка есть полином 3-го порядка, изменение чувствительности есть полином 3-го порядка. Если производитель не дает коэффициентов или не указывает иного метода компенсации напрямую в даташите- то нужно писать письма, авось он раздает секретную формулу в приватном порядке или за деньги. Не поверите, спрашивал у гугля в первую очередь. Только меня вариант калибровки как в ардуине не устраивает. Производитель молчит как партизан. Ответили , что только гарантируют работоспособность устройства во всем рабочем диапазоне температур не превышая заявленное смещение нуля. По моим данным более-менее работает аппроксимация 4-го порядка. Но на разных наборах данных есть отклонения. Есть опыт работы с ADIS16405, там внутренняя компенсация, неизвестно по каким алгоритмам, но при тех же условиях у него уход нуля практически незаметен. И гистерезис не виден, возможно тонет в шумах. Теперь хочу такого же поведения от MPU с помощью своей обработки.
|
|
|
|
|
|
|
|
Aug 7 2012, 06:06
|

Знающий
Группа: Свой
Сообщений: 966
Регистрация: 27-05-06
Из: СПб
Пользователь №: 17 499
|
Так вы же уже практически сделали термокомпенсацию.. Снимаете зарактеристику, апроксимируете, применяете с обратным знаком. У каждого датчика закон будет свой, и гистерезис тоже. Можете отбирать "хорошие" и не компенсировать их, остальные выкидывать  Кстати, почему такая размытая получилась картина, как будто датчик все время трясут? Обычно шум менее 0.1 гр/с... А ADIS16405 не уходит, потому что что лишние 90 баксов совсем не зря за компенсацию берут Датчиков там кажется штук 8, под разными углами стоят, посему он и стоит не 10$ как инвенсенс..
|
|
|
|
|
|
|
|
Aug 7 2012, 11:24
|
Участник
Группа: Участник
Сообщений: 71
Регистрация: 18-01-06
Пользователь №: 13 333
|
Цитата(Serj78 @ Aug 7 2012, 09:06) Так вы же уже практически сделали термокомпенсацию.. Снимаете зарактеристику, апроксимируете, применяете с обратным знаком. У каждого датчика закон будет свой, и гистерезис тоже. Можете отбирать "хорошие" и не компенсировать их, остальные выкидывать Кстати, почему такая размытая получилась картина, как будто датчик все время трясут? Обычно шум менее 0.1 гр/с... , все правильно. Если беру одну ветку графика, например на нагреве, то получаю замечательную аппроксимацию. Остается вопрос с гистерезисом. При нагреве и охлаждении будут разные кривые. При разной скорости изменения температуры и разных диапазонах изменения температуры тоже будут разные кривые. Какой аппроксимацией в этих случаях пользоваться не понятно. А картина размытая я думаю из-за вибраций термокамеры. Она постоянно гудит, трещит)
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|