| |
 Бездатчиковая оценка положения ротора BLDC/PMSM Бездатчиковая оценка положения ротора BLDC/PMSM, на высоких скоростях |
|
|
|
|
 Jan 1 2014, 18:01 Jan 1 2014, 18:01
|
Местный

Группа: Участник
Сообщений: 421
Регистрация: 2-01-08
Пользователь №: 33 778

|
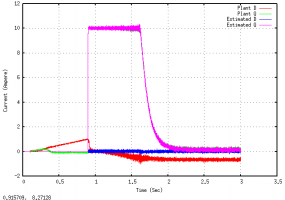
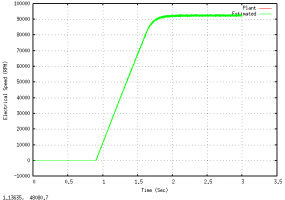
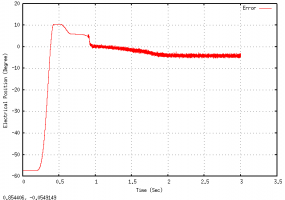
Отлаживаю алгоритм (модификация вот этого, там EKF на 5 переменных, токи в dq, скорость, положение и момент нагрузки) на численной модели (модель BLDC основана на этом, форма ЭДС синусоидальная, ШИМ обсчитывается на каждом отрезке между переключениями ключей). Появляются некоторые вопросы. 1. Ошибка по положению возростает с ростом скорости. Добился некоторого улучшения путем доработки решателя ОДУ (тот который часть EKF). Но все ещё остается ~4 градуса ошибки на ~90000 rpm электрической скорости при 20 кГц ШИМ (ошибка пропорциональна скорости и периоду, на 40кГц будет ~2 градуса). Как можно бороться с этой проблемой? Пытаться дальше уточнять решение ОДУ по моему бессмысленно, на реальной системе проявяться другие детали и будет та же проблема. Компенсировать смещение самой оценки положения после EKF тоже плохая идея, надо устранять эти "вредные" невязки которые приводят к смещенности оценки. Или может быть я хочу слишком много и надо просто увеличивать частоту ШИМ? 2. Во всей литературе по теме упоминается field weakening. Я решил проверить, на своей модели, т.к. я не понимаю каким образом ток по прямой оси может привести к уменьшению постоянной ЭДС, что вызывает сомнения в правильности модели. Задал отрицательный ток по D, и действительно скорость возросла, но почему? Глядя на уравнения BLDC или PMSM это не очевидно.
Спасибо. Если кому не лень посмотреть, код здесь.
Сообщение отредактировал amaora - Jan 1 2014, 18:01
|
|
|
|
|
|
|
 |
Ответов
|
|
Jan 2 2014, 20:39
|

Знающий
Группа: Свой
Сообщений: 562
Регистрация: 25-07-06
Из: Зеленоград, Новосибирск
Пользователь №: 19 088
|
Да, на таких скоростях, а точнее кратностях, возникают проблемы.
Надо копать в сторону предикативного управления, причём у меня коллега с пол года отлаживал предикативное управление, и жаловался на то, что статей IEEE по этому вопросу реально полезных почти нет. В итоге отладил, получив быстродействие на 100% наброс нагрузки порядка трёх - пяти периодов ШИМ, но это не привод был, а инвертор работающий на сеть.
Кто это реализовал, тот это не особо афиширует. Поищите зарубежные патенты на эту тему.
У меня на реальном PMSM бездатчиковые алгоритмы в широком диапазоне частот вращения не работали, максимум до 20-30 тыс кажется, дальше полученный фазовый угол сильно искажался, это при тех же 20кГц ШИМ. Но EKF я не делал.
Поэтому кстати BLDC проще реализовать на высоких оборотах, чем FOC.
А вообще, если реально на 90тыс оборотов будет работать с ошибкой 5%, считаю что это будет очень круто. Где только такие скорости, это вопрос. В спортивном моделизме больше 50 редкость, другие варианты в голову не приходят, какие-то спец применения.
--------------------
"Отсутствие вашей судимости - это не ваша заслуга, а наша недоработка."
Ф.Дзержинский.
|
|
|
|
|
|
|
|
Jan 4 2014, 19:16
|
Местный
Группа: Участник
Сообщений: 421
Регистрация: 2-01-08
Пользователь №: 33 778
|
Цитата(Turnaev Sergey @ Jan 3 2014, 00:39)  А вообще, если реально на 90тыс оборотов будет работать с ошибкой 5%, считаю что это будет очень круто. Где только такие скорости, это вопрос. В спортивном моделизме больше 50 редкость, другие варианты в голову не приходят, какие-то спец применения. Так это электрическая скорость, а механическая при этом ~8000 об./мин. Цитата Надо копать в сторону предикативного управления, причём у меня коллега с пол года отлаживал предикативное управление, и жаловался на то, что статей IEEE по этому вопросу реально полезных почти нет. В итоге отладил, получив быстродействие на 100% наброс нагрузки порядка трёх - пяти периодов ШИМ, но это не привод был, а инвертор работающий на сеть. EKF не предикативен? Ошибка возникает не от запаздывания оценки, а от того, что при таком крупном шаге (~30 градусов) возникает большая погрешность интегрирования уравнений. Ведь в dq координатах, вектор напряжения приложенного от инвертора, уже нельзя считать неподвижным в течении такта. Появляются "ненормальные" невязки, фильтр пытается их устраниить и уводит оценку в какое-то смещение. В какой-то степени помогает добавление простенькой адаптации по постоянной двигателя. Но идентификатор и без того капризен, а здесь ещё и от скорости все будет ползти. Может быть все таки стоит интегрировать с учетом формы ШИМ, во всех виденных мной статьях эти вопросы умалчиваются. На замер пульсаций тока от ШИМ переходить желания нет.
|
|
|
|
|
|
Сообщений в этой теме
 amaora Бездатчиковая оценка положения ротора BLDC/PMSM Jan 1 2014, 18:01 amaora Бездатчиковая оценка положения ротора BLDC/PMSM Jan 1 2014, 18:01  oleg_d Цитата(Turnaev Sergey @ Jan 2 2014, 22:39... Jan 3 2014, 01:43 Turnaev Sergey Вот это, к сожалению не получилось, там возникали ... Jan 3 2014, 16:15 amaora Не хочется засорять форум ещё одной темой, добавлю... Jan 5 2014, 21:08 amaora Ну вот, через почти год понял, что фильтр в той ст... Nov 16 2014, 15:29 amaora Попробовал на реальном двигателе (а не численной м... May 24 2015, 14:40 Elsystems Вот это да. EKF.... А достаточно элементарного выч... Nov 3 2015, 05:30 amaora Уже перешел на фиксированные коэффициенты ради эко... Nov 3 2015, 15:58 Turnaev Sergey amaora
А можете осциллограммы фазного тока под на... Nov 23 2015, 15:04 amaora Данные с АЦП, ток в фазах А и B. Двигатель модельн... Nov 23 2015, 17:12 Turnaev Sergey Спасибо!
Вообщем тоже не идеал получается.
П... Nov 24 2015, 08:08 amaora Формы тока можно выправить. По пульсациям невязок ... Mar 12 2016, 11:07 oleg_d Цитата(Turnaev Sergey @ Jan 2 2014, 22:39... Jan 3 2014, 01:43 Turnaev Sergey Вот это, к сожалению не получилось, там возникали ... Jan 3 2014, 16:15 amaora Не хочется засорять форум ещё одной темой, добавлю... Jan 5 2014, 21:08 amaora Ну вот, через почти год понял, что фильтр в той ст... Nov 16 2014, 15:29 amaora Попробовал на реальном двигателе (а не численной м... May 24 2015, 14:40 Elsystems Вот это да. EKF.... А достаточно элементарного выч... Nov 3 2015, 05:30 amaora Уже перешел на фиксированные коэффициенты ради эко... Nov 3 2015, 15:58 Turnaev Sergey amaora
А можете осциллограммы фазного тока под на... Nov 23 2015, 15:04 amaora Данные с АЦП, ток в фазах А и B. Двигатель модельн... Nov 23 2015, 17:12 Turnaev Sergey Спасибо!
Вообщем тоже не идеал получается.
П... Nov 24 2015, 08:08 amaora Формы тока можно выправить. По пульсациям невязок ... Mar 12 2016, 11:07 AndreyChip Я думаю, Вам не помешало бы взглянуть на документа... Mar 13 2016, 07:15 AndreyChip Я думаю, Вам не помешало бы взглянуть на документа... Mar 13 2016, 07:15
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|