Собрал драйвер биполярного шагового двигателя на четырёх BTS7960B по даташиту. Управляю сием безобразием с помощю микроконтроллера. Возникли проблемы с температурным режимом микросхем и измерением тока. Если я заставляю двигатель постоянно вращаться, то они нагреваются где то до 45 градусов и держат такую температуру, а если например я сделал шаг и жду около 30 секунд, то микрухи безбожно греются и через пару минут уходят в защиту от перегрева. Второй баг это показания тока, оно если движок на удержании почему то растёт.
Может кто имел дело с сием чудом? Возможно я не правильно организовал алгоритм управления.
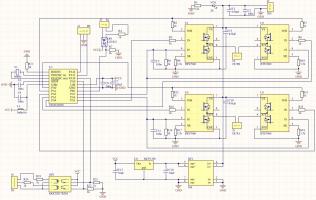
PS: частота ШИМ у меня 20кГц, а ток на моторе 3А. Я при включении питания наращиваю ШИМ пока не получу ток 3А (меряю напругу на ноге IS), запоминаю показания ШИМа и в дальнейшем их использую. Схема прилогается.
Ещё вопрос - до какой скорости я могу разогнать двигатель 23HS2430?
Сообщение отредактировал glags - Nov 26 2014, 13:32
Эскизы прикрепленных изображений

















 Nov 26 2014, 13:28
Nov 26 2014, 13:28