Комплиментарный фильтр, это самая примитивная реализация комплексирования датчиков. Для правильной оценки, такому фильтру нужны периоды покоя системы, когда он может выделить вектор ЖО и скомпенсировать гироскоп.
Взрослые дяди комплексируют через фильтр Калмана, но это не конкретная реализация, а целый раздел математики, и фильтр выводится из вектора состояния, который задаётся исходя из конкретной задачи.
Вы можете поискать патенты на данный счёт.
Но, на судах нет такой динамики, для которой нужно было бы компенсировать акселерометр по ДУСу. Разумеется, если у вас не океанская яхта, что по волнам фигачит на 70 узлах.
Для акселерометров достаточно два датчика, поставленных встречно. То есть с двух сторон платы.
Каждое показание состоит из проекции ЖО + некое паразитное а, сдвигающее результирующий вектор в пределах конуса состояний. Причём значение ЖО вы знаете (достаточно один раз откалибровать датчики на земле).
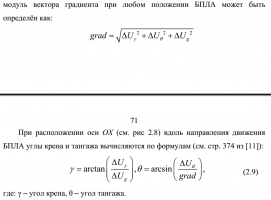
Формулы вытащить не получилось, прилагаю картинкой. Это стандартные формулы из учебника Пельпора. Подразумевается синусоидальная зависимость показаний от угла.
Пельпор Д.С. Гироскопические приборы и системы: Учеб. для вузов по спец. «Гироскоп, приборы и устройства» / Д.С. Пельпор, И.А. Михалев, В.А. Бауман и др.; Под. ред. Д.С. Пельпора. – 2-е изд., перераб. и доп. – М.: Высшая школа, 1988 г. – 424 с.; ил.
Хорошая книжка, базовую теориюраскрывает достаточно ясно, при наличии вузовской базы по математике.
Купите пару модулей MPU-6050 на али, их там как грязи. Да поиграйтесь.
Но гироскоп вам не нужен.
Или можете купить готовую гироголову FY-AHRS -2000B к примеру. Там на выходе UART, протокол обмена открыт на сайте. Хотя работает она не сказать, что хорошо, но для вашей задачи может и хватить.
Эскизы прикрепленных изображений

















 Feb 23 2015, 11:23
Feb 23 2015, 11:23