| |
 Синхронный двигатель Синхронный двигатель, точное позиционирование |
|
|
|
|
 Aug 29 2013, 17:26 Aug 29 2013, 17:26
|
Профессионал

Группа: Свой
Сообщений: 1 284
Регистрация: 9-04-06
Пользователь №: 15 968

|
Добрый день.
Есть синхронный трехфазный двигатель (3 фазы, 4 обмотки на каждой фазе расположенные по кругу ABC-ABC-ABC-ABC). На роторе - магниты. Магнитов больше чем обмоток, расположены строго над обмотками. Нужно точное позиционирование ротора, есть энкодер. Изложу свои домыслы, поправьте пожалуйста где ошибаюсь:
1. Управление трехфазным синусом, сделанным через ШИМ - чередованием выбираем направление.
2. Ток обмоток (амплитуда шима) выбираем исходя из необходимой скорости разгона (на роторе инертная масса)
3. Частоту синуса - опять же исходя из требуемой скорости разгона.
Вопрос нарисовался сам собой: каким образом связать переменную процесса (положение ротора) с ДВУМЯ управляемыми величинами - частотой синуса и амплитудой? Если была бы одна управляемая величина - через ПИД регулятор. Да и в этом случае тоже через ПИД - регулятор наверняка, вычислить динамические параметры системы и выставить коэффициенты под оптимальное регулирование - это не проблема. Но вот по какому закону связать частоту и амплитуду - затык. У асинхронников частота с амплитудой связывается через закон V/F. Но там другая ситуация. А тут на момент двигателя получается влияет амплитуда синуса, а частоту (или точнее скорость изменения фазы) надо выбирать следя за энкодером исходя из того, чтобы ротор не "опрокинулся", т.е. не проскользнул. Быстро крутанем - даже при максимальном токе из-за инертности массы проскользнет, а значит дернется в другую сторону. Может смотреть за энкодером и держать опережение угла синуса относительно ротора? Ну то есть чтоб синус статора от ротора далеко не убегал. Подозреваю, что тоже есть какой-то закон типа V/F, как для асинхронников, но до сих пор с синхронниками не сталкивался, поэтому прошу подсказки специалистов - ссылки, литература, советы - все что не лень выложить.
|
|
|
|
|
|
|
 |
Ответов
|
|
Aug 31 2013, 17:32
|

Местный
Группа: Участник
Сообщений: 265
Регистрация: 19-01-12
Пользователь №: 69 736
|
Цитата каким образом связать переменную процесса (положение ротора) с ДВУМЯ управляемыми величинами - частотой синуса и амплитудой? Делайте так: Никаких ШИМов тут не надо. Два токовых релейных контура по дву фазам, с частотами коммутации несколько килогерц, теперь вы сможете задать вектор тока в системе координат 120 градусов. Далее с помощью сигнала с датчика положения и функции sin ориентируете вектор тока относительно ротора так, чтобы был максимальный момент (фазу вектора нужно будет настроить). Теперь вы сможете задавать амплитуду вектора тока, и она будет пропорциональна моменту на роторе. С теорией регулирования вы знакомы, тогда дальше просто - поверх делаем скоростной контур, а поверх него - позиционный. Конечно это в двух словах - на практике очень много подводных камней.
|
|
|
|
|
|
|
|
Aug 31 2013, 18:46
|
Профессионал
Группа: Свой
Сообщений: 1 284
Регистрация: 9-04-06
Пользователь №: 15 968
|
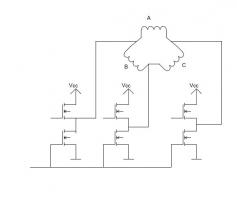
Цитата(Elsystems @ Aug 31 2013, 21:32)  Делайте так: Никаких ШИМов тут не надо. Два токовых релейных контура по дву фазам, с частотами коммутации несколько килогерц, теперь вы сможете задать вектор тока в системе координат 120 градусов. Далее с помощью сигнала с датчика положения и функции sin ориентируете вектор тока относительно ротора так, чтобы был максимальный момент (фазу вектора нужно будет настроить). Теперь вы сможете задавать амплитуду вектора тока, и она будет пропорциональна моменту на роторе. С теорией регулирования вы знакомы, тогда дальше просто - поверх делаем скоростной контур, а поверх него - позиционный. Конечно это в двух словах - на практике очень много подводных камней. Согласен, прочитал статейку микрочипа - там так же советуют - делаем фиксированное опережение угла для достижения максимального момента, угол опережения двигаем синхронно с ротором (следя за его положением по энкодеру), а управляем только посредством амплитуды синуса. Теперь возник еще вопрос. Посмотрел как слеплены драйверы (рисунок, упрощенный естественно) и задумался как таким управлять? Все нижние ключи управляются одной линией, верхние - раздельными. Получается в рабочем режиме нижние драйверы все должны быть включены, а верхние шимятся на положительной полуволне синуса, а на отрицательной что - отключаются и все? Так что ли? Стоп! Включив нижний драйвер, нам верхний то вообще нельзя включать - сквознячок будет...Как такое вообще работало тогда? Цитата alexPec то, что применяете ПЛИС это правильно, но зачем для управления МК, на ПЛИСе все функции можно сделать и лучше. Только я бы делал на CPLD
и по отдельности каждый драйвер. Так МК то в той же ПЛИС и реализован, NIOS, для гибкости внешнего интерфейса и т.д.
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Sep 1 2013, 11:32
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(alexPec @ Aug 31 2013, 21:46) Так МК то в той же ПЛИС и реализован, NIOS, для гибкости внешнего интерфейса и т.д. Посмотрел я что предлагает Altera в своем "Drive-On-Chip Reference Design" Да, поначалу смотрится впечатляюще, векторное управление 4-я сервоприводами одновременно! Но копнув глубже и разобравшись что у них сделано в железе, а что софтварно, возникает непреодолимое чувство, что это просто очередной маркетинговый развод. В железе сделаны только примитивный парк и кларк. Так их и Cortex щелкает своим float-point ускорителем за микросекунды. Как большое достижение Altera представляет ШИМ модуляторы. Так их 4-е штуки есть и в гораздо более дешевом MK60. Далее как достижение представлена синхронизация АЦП с ШИМ. Но вот у MK60 есть не только эта синхронизация и 16-и битный АЦП с аппаратной фильтрацией но и еще и PGA. Потом пространственно-векторная модуляция в альтере сделана программно! Все каналы PI тоже программные и на ARM9 или NIOS, которые заведомо тормознее Cortex-M4. Не удивительно, что у них частота модуляции выбрана 16 КГц. И как последний гвоздь, связывающий софт базируется на RTOS uCOS-II, которая в принципе устарела, бесплатная только в демках, и для коммерческого проекта неоправданно дорогая. Это при том, что для MK60 библиотеки управления движком идут с совершенно бесплатной и более мощной RTOS MQX.
|
|
|
|
|
|
|
|
Sep 1 2013, 16:39
|
Профессионал
Группа: Свой
Сообщений: 1 284
Регистрация: 9-04-06
Пользователь №: 15 968
|
Цитата Посмотрел я что предлагает Altera в своем "Drive-On-Chip Reference Design"
Да, поначалу смотрится впечатляюще, векторное управление 4-я сервоприводами одновременно! Честно говоря, даже не знал что оно такое есть. Спасибо за информацию! Я как-то не люблю использовать библиотеки, операционки, и стараюсь заимствовать по минимуму. В плис у меня будет СВОЙ ШИМ, аппаратный формирователь синуса, аппаратное слежение за энкодерами и аппаратное опережение угла. Т.е. векторное (так как я это понимаю) управление мне не нужно - я не оцифровываю токи, напряжения, не сравниваю фазы и т.д. На программу ляжет нагрузка только реализовать 4 PID-регулятора, причем с железа я буду считывать рассогласование, а управлять буду только амплитудой синусов. Как мне кажется, для такой задачи кортексы уж очень избыточно. Цитата Но вот у MK60 есть не только эта синхронизация и 16-и битный АЦП с аппаратной фильтрацией но и еще и PGA. Мне бы такие МК лет 5-6 назад, когда частотник лепил. Для асинхронных частотников конечно самое то.
|
|
|
|
|
|
|
|
Sep 1 2013, 18:41
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(alexPec @ Sep 1 2013, 19:39) Т.е. векторное (так как я это понимаю) управление мне не нужно - я не оцифровываю токи, напряжения, не сравниваю фазы и т.д. В вашем случае для конкретного обсуждения все еще мешает большая неопределенность. Так какой у вас движок BLDC или BLAC (brushless AC, он же PMSM)? В случае BLDC векторное управление в принципе применить невозможно. А с BLAC без векторного управления и пространственно-векторной модуляции потеряете в стартовом моменте, стабилизации момента и коэффициенте использования напряжения (или будет меньше допуск на просадку напряжения), если вообще сумеете при заданных ограничениях мощности достичь необходимого согласования момента и скорости. Скорее всего попытка сделать "упрощенное" управление BLAC закончится констатацией факта, что не хватает мощности движка если движок был подсмотрен у аналогичных решений, но использующий векторное управление.
|
|
|
|
|
|
|
|
Jul 7 2015, 08:26
|
Местный
Группа: Свой
Сообщений: 229
Регистрация: 3-02-06
Из: Санкт-Петербург
Пользователь №: 13 974
|
Цитата(AlexandrY @ Sep 1 2013, 21:41) В случае BLDC векторное управление в принципе применить невозможно. Можно с этого момента поподробнее, почему вы считате что при BLDC нельзя использовать векторное управление ?
|
|
|
|
|
|
|
|
Jul 8 2015, 08:52
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(Herz @ Jul 7 2015, 14:09) Это тогда, два года назад, нельзя было.  А если серьёзно, то, наверное, потому, что к несинусоидальному back-electromagnetic force (BEMF) векторный аппарат неприменим. Это два года тому назад нельзя было. А сейчас для векторного аппарата BLDC существует таблица коррекций формы тока или поля полюсов , которая заполняется на этапе самокалибровки привода под конкретный мотор. Точно так же как векторные частотники под асинхронные моторы самокалибровались. Едниственное неудобство- самокалибровка делается с прокручиванием вала мотора, так что надо нагрузку механически отсоединять. Кстати, поэтому на современных синхронных моторах перестали пилить выравнивающие поле (до формы синуса) канавки на полюсах- мы по этому поводу ругались с поставщиками- два года назад купленные моторы еще имели выравнивающие канавки, а современные-уже нет. А поставщики сказали- меняйте сервоконтроллер на более умный.
|
|
|
|
|
|
|
|
Jul 9 2015, 10:08
|
Местный
Группа: Свой
Сообщений: 229
Регистрация: 3-02-06
Из: Санкт-Петербург
Пользователь №: 13 974
|
Цитата(khach @ Jul 8 2015, 11:52) Это два года тому назад нельзя было. А сейчас для векторного аппарата BLDC существует таблица коррекций формы тока или поля полюсов , которая заполняется на этапе самокалибровки привода под конкретный мотор. Точно так же как векторные частотники под асинхронные моторы самокалибровались. Едниственное неудобство- самокалибровка делается с прокручиванием вала мотора, так что надо нагрузку механически отсоединять. а как потом эта коррекция используются ? потом корректируются данные снимаемые датчиков токов или меняют саму форму поддеваемого сигнала на привод? Цитата Кстати, поэтому на современных синхронных моторах перестали пилить выравнивающие поле (до формы синуса) канавки на полюсах- мы по этому поводу ругались с поставщиками- два года назад купленные моторы еще имели выравнивающие канавки, а современные-уже нет. а сильно форма сигнала отличается от синусойды ? Цитата А поставщики сказали- меняйте сервоконтроллер на более умный. красавцы, простые как три копейки статья по теме Векторная подсистема регулирования тока для штатного или аварийного питания ВД (BLDC Sensorless FOC-control)http://model.exponenta.ru/k2/Jigrein/dcs_knv.htm#L100
|
|
|
|
|
|
|
|
Jul 9 2015, 10:42
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(digital @ Jul 9 2015, 12:08) а как потом эта коррекция используются ? потом корректируются данные снимаемые датчиков токов или меняют саму форму поддеваемого сигнала на привод? Да неизвестно- на словах сказали про таблицы, а за исходники денежку хотят. Цитата а сильно форма сигнала отличается от синусойды ? Ну я сейчас каждый новый двигатель для проверки ставлю в токарный станок, нагружаю на треугольник из резисторов и подключаю осциилограф китайский. И запускаю фурье и смотрю соотношение 1, 3, 5 гармоник (это трапеция), 1 и 2 - это несимметричность полюсов, и субгаромоники (по числу полюсов машины)- это неидеальность магнитов в роторе или различных полюсов.
|
|
|
|
|
|
|
|
Jul 9 2015, 11:38
|
Местный
Группа: Свой
Сообщений: 229
Регистрация: 3-02-06
Из: Санкт-Петербург
Пользователь №: 13 974
|
Цитата(khach @ Jul 9 2015, 13:42) Да неизвестно- на словах сказали про таблицы, а за исходники денежку хотят. ну где то должен быть синус, лмбо на входе привода, либо на выходе Цитата Ну я сейчас каждый новый двигатель для проверки ставлю в токарный станок, нагружаю на треугольник из резисторов и подключаю осциилограф китайский. И запускаю фурье и смотрю соотношение 1, 3, 5 гармоник (это трапеция), 1 и 2 - это несимметричность полюсов, и субгаромоники (по числу полюсов машины)- это неидеальность магнитов в роторе или различных полюсов. о, спасибо Если вернуться к исходной задаче, как выглядит удержание позиции ? Ведь для высокого момента требуется опережение магнитным полем ротора на 90гр, получается в режиме удержания магнитное поле должно прыгать +-90градусов, и как тут будет работать векторное управление? 
|
|
|
|
|
|
|
|
Jul 9 2015, 13:02
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(digital @ Jul 9 2015, 13:38) ну где то должен быть синус, лмбо на входе привода, либо на выходе Или только внутри контроллера в качестве математической абстракции. Цитата Если вернуться к исходной задаче, как выглядит удержание позиции ? Ведь для высокого момента требуется опережение магнитным полем ротора на 90гр, получается в режиме удержания магнитное поле должно прыгать +-90градусов, и как тут будет работать векторное управление? А это от характера нагрузки зависит. Если большой момент нужен только для быстрой смены позиции (разгон-остановка) то проблем нет- энкодер укажет нужное рассогласование, а на точке момент уже и ненужен. Если момент и после остановки постоянный- то тоже проблм нет, рано или поздно ПИД по позиции доведет привод до нужной точки. А вот если момент знакопеременный, то это ж..., задница короче. В приводе столика фрезерного станка, где по столику постоянно лупила фреза для мягких режимов ставили два безколлекторника, которые работали " в раздрай" т.е в упор друг- другу с моментом заранее заведомо большим чем возмущающий. А для тяжелых режимов был заперт кругового фрезерования и зажим стола пневматическим тормозом. Это все при низких частотах возмущающегом момента- при высокоскоростном шпинделе привод просто не замечал переменного сопротивления от фрезы. Так что надо бы еще частотные характеристики сервопривода и нагрузки описать для корректности задачи.
|
|
|
|
|
|
Сообщений в этой теме
 alexPec Синхронный двигатель Aug 29 2013, 17:26 alexPec Синхронный двигатель Aug 29 2013, 17:26 AlexandrY Цитата(alexPec @ Aug 29 2013, 20:26) ссыл... Aug 29 2013, 19:27 AlexandrY Цитата(alexPec @ Aug 29 2013, 20:26) ссыл... Aug 29 2013, 19:27 alexPec Цитата(AlexandrY @ Aug 29 2013, 23:27) Не... Aug 29 2013, 19:44 alexPec Цитата(AlexandrY @ Aug 29 2013, 23:27) Не... Aug 29 2013, 19:44 Herz Цитата(AlexandrY @ Aug 29 2013, 22:27) На... Aug 29 2013, 20:51 alexPec Посмотрел на сайт микрочипа и понял, что не понял ... Aug 30 2013, 04:08 AlexandrY Цитата(alexPec @ Aug 30 2013, 07:08) Посм... Aug 30 2013, 05:41 alexPec ЦитатаУ шаговых и BLDC как минимум разные схемы др... Aug 30 2013, 06:11 Iptash Цитата(alexPec @ Aug 29 2013, 21:26) 1. У... Aug 31 2013, 16:38 khach Цитата(alexPec @ Jul 11 2015, 18:01) Дада... Jul 11 2015, 18:18 Elsystems Цитата(digital @ Jul 9 2015, 14:38) Если ... Sep 5 2015, 17:06 digital Цитата(Elsystems @ Sep 5 2015, 20:06) Сис... Sep 15 2015, 13:28 LexaryStyle Цитата(AlexandrY @ Aug 31 2013, 23:32) Та... Nov 22 2013, 16:34 Lomax -
Цитата(Elsystems @ Nov 3 2015, 05:15) ... Jan 26 2016, 09:32 Iptash alexPec то, что применяете ПЛИС это правильно, но ... Aug 31 2013, 17:54 Elsystems ЦитатаВсе нижние ключи управляются одной линией, в... Sep 1 2013, 04:15 alexPec Пардон, на корпусе было плохо видно последнюю цифр... Sep 1 2013, 08:02 radosvet Прошу извините что вопрос не в тему, непонимаю как... Oct 25 2013, 21:40 TSerg Такие "вещи" для знако-переменной нагруз... Jul 11 2015, 18:36 digital Возможно сделать позиционирование при помощи синхр... Sep 15 2015, 10:00 Elsystems Цитата(digital @ Sep 15 2015, 13:00) Возм... Nov 3 2015, 05:15 Sidoroff Решил поднять тему.
Разрабатываю частотник для кит... Oct 2 2017, 18:29 Herz Цитата(AlexandrY @ Aug 29 2013, 22:27) На... Aug 29 2013, 20:51 alexPec Посмотрел на сайт микрочипа и понял, что не понял ... Aug 30 2013, 04:08 AlexandrY Цитата(alexPec @ Aug 30 2013, 07:08) Посм... Aug 30 2013, 05:41 alexPec ЦитатаУ шаговых и BLDC как минимум разные схемы др... Aug 30 2013, 06:11 Iptash Цитата(alexPec @ Aug 29 2013, 21:26) 1. У... Aug 31 2013, 16:38 khach Цитата(alexPec @ Jul 11 2015, 18:01) Дада... Jul 11 2015, 18:18 Elsystems Цитата(digital @ Jul 9 2015, 14:38) Если ... Sep 5 2015, 17:06 digital Цитата(Elsystems @ Sep 5 2015, 20:06) Сис... Sep 15 2015, 13:28 LexaryStyle Цитата(AlexandrY @ Aug 31 2013, 23:32) Та... Nov 22 2013, 16:34 Lomax -
Цитата(Elsystems @ Nov 3 2015, 05:15) ... Jan 26 2016, 09:32 Iptash alexPec то, что применяете ПЛИС это правильно, но ... Aug 31 2013, 17:54 Elsystems ЦитатаВсе нижние ключи управляются одной линией, в... Sep 1 2013, 04:15 alexPec Пардон, на корпусе было плохо видно последнюю цифр... Sep 1 2013, 08:02 radosvet Прошу извините что вопрос не в тему, непонимаю как... Oct 25 2013, 21:40 TSerg Такие "вещи" для знако-переменной нагруз... Jul 11 2015, 18:36 digital Возможно сделать позиционирование при помощи синхр... Sep 15 2015, 10:00 Elsystems Цитата(digital @ Sep 15 2015, 13:00) Возм... Nov 3 2015, 05:15 Sidoroff Решил поднять тему.
Разрабатываю частотник для кит... Oct 2 2017, 18:29
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|