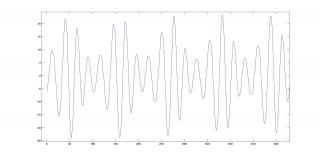
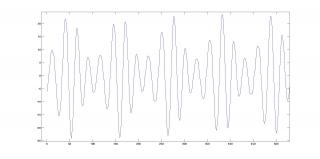
Спасибо за комментарии. Напряжение на DC-шине (ось ординат - в В, абсцисс - в мс):
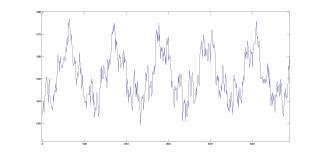
И соответствующий ток на одной из фаз (ось ординат - в A, абсцисс - в мс):
Были подозрения, что наш опытный образец частотника глючит, судя по отзывам и по эксперименту с параллельным заклиненным двигателем, причина может быть объективной. Когда мы подключали к мощному двигателю более слабый на холостом ходу, то он тоже механически колебался с той же частотой, видимо из-за колебаний напряжения. Сегодня обещали подвезти 30 кВт частотник (пока не знаю модели), проверим. Хочется сначала удостовериться, что железо в порядке.
Из сигналов обратной связи - три токовых сигнала с датчиков Холла и напряжение на DC-шине. Управление скалярное. Частота ШИМ - 10 кГц, может меняться (изменение на 8 кГц ничего не изменило). Управление по ModBus RTU, сигналы обратной связи постоянно передаются через RS232 в матлабе пакеты сшиваются и визуализируются.
Пока только начинаю разбираться в векторных алгоритмах, хотелось бы для начала поставить задачу определения момента и/или скорости вращения двигателя (по сигналам обратной связи). Буду очень признателен, если порекомендуете источники информации. Полезна будет информация о том, как частотники определяют параметры двигателя для векторного управления, может быть мануал. Пока изучаю книгу "Modern Power Electronics and AC Drives" By Bimal K. Bose.. Уже есть каша в голове, обычно через некоторое время приходит понимание))).

















 Jan 21 2016, 13:22
Jan 21 2016, 13:22