| |
 Контролер для 3-х двигателей. Контролер для 3-х двигателей. |
|
|
|
|
 Jul 2 2017, 08:31 Jul 2 2017, 08:31
|
Профессионал

Группа: Участник
Сообщений: 1 778
Регистрация: 29-03-12
Пользователь №: 71 075

|
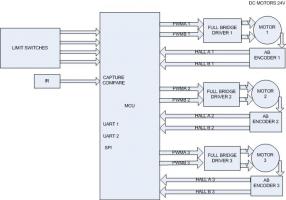
Мне нужно сделать драйвер для 3-х двигателей. Двигатели обычные DC Motors 24V. Двигатели имеют энкодеры для отслеживания позиции. Хотелось чтоб энкодеры были апаратные. Обычно это делается на таймерах. Вот задумался какой контроллер выбрать. PWM+Encoders требуют таймера. К тому же на мои нужды нужно еще 3 таймера. У ST вроде нет контролеров заточенных под motion. У TI есть но что то не хочется связываться с TI. К тому же 3 двигателя. Есть контроллеры под такую задачу? Основная проблема - аппаратно обработать 3 энкодера. На атмеловских AVRках я пользовался внешними интераптами но это, как мне кажется, не очень хороший способ.
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
 |
Ответов
|
|
Oct 29 2017, 14:58
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Jenya7 @ Oct 29 2017, 14:25)  Вот решение близко к идеальному. https://geektimes.ru/post/286324/Хороший выбор.  У меня уже вышла 3-я версия этого контроллера. Но никак руки не дойдут зафиксить и выложить релиз. Все время идут изменения. Обязательное условие для применения моего фреймворка это использование RTOS MQX и IAR не выше 7.80.1 поскольку только до этой версии поддерживается плагин для MQX 4.2 Уровень OS abstraction layer я не применяю. Тут недавно приложение для этой платы сделал - прграммируемый генератор пачек импульсов произвольной скважности. В пределе на единичном выходе получаю 50% ШИМ частотой 500 кГц с токами до 100А. В последней моей версии стоит гальваноизолированный CAN. Можно без опасений соединять CAN-ом разбросанную сеть таких плат управляющих моторами в несколько сот ватт.
|
|
|
|
|
|
|
|
Oct 30 2017, 11:38
|
Гуру
Группа: Участник
Сообщений: 2 219
Регистрация: 16-08-12
Из: Киров
Пользователь №: 73 143
|
Цитата(khach @ Oct 30 2017, 13:53) Эзернет может отличаться непредсказуемым флудом пакетов, который заторомозит любую RTOS до невменяемости. Однако. Интересно как вы это установили? Не знаю, как у вас в программе, у меня обработчик сетевого стека запускается каждую мсек, выполняет транзакцию и выходит далее, прием пакета идет на прерываниях, причем, чтобы не произошло зацикливания при постоянно идущих коротких пакетах, сделан обработчик, который снижает приоритет эзернета при таких случаях, как при этом может все зависнуть - мне непонятно... Цитата(jcxz @ Oct 30 2017, 14:33) Затормозить могут только кривые руки программиста. Какая бы ни была RTOS, но драйвер MAC-уровня Ethernet пишет всё-таки программист. Если у него есть голова на плечах, то никакой флуд не страшен. Как уже написал, может сложится ситуация, когда пакеты мин. длины идут непрерывно, пришлось делать обработчик таких ситуаций.
|
|
|
|
|
|
|
|
Oct 30 2017, 11:41
|
Гуру
Группа: Свой
Сообщений: 5 228
Регистрация: 3-07-08
Из: Омск
Пользователь №: 38 713
|
Цитата(mantech @ Oct 30 2017, 14:35) чтобы не произошло зацикливания при постоянно идущих коротких пакетах, сделан обработчик, который снижает приоритет эзернета при таких случаях, как при этом может все зависнуть - мне непонятно... У меня вообще задача обслуживания стека Ethernet-а имеет самый низший приоритет. И не может затормозить никого. А приём/передача пакетов Ethernet выполняются по DMA. PS: Тут как обычно - тема про плохого танцора которому что-то мешает.... Цитата(mantech @ Oct 30 2017, 14:38) Как уже написал, может сложится ситуация, когда пакеты мин. длины идут непрерывно, пришлось делать обработчик таких ситуаций. А зачем его делать? Ну потеряются эти пакеты, не получит их программа и что? Это же ситуация нештатной работы Ethernet - связь по Ethernet возможно будет со сбоями, но остальным задачам поплохеть от этого не должно.
|
|
|
|
|
|
|
|
Oct 30 2017, 12:02
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(jcxz @ Oct 30 2017, 13:41) У меня вообще задача обслуживания стека Ethernet-а имеет самый низший приоритет. И не может затормозить никого.
А зачем его делать? Ну потеряются эти пакеты, не получит их программа и что? Ну у нас же управление движением, по сети идут не только пакеты задания скорости, но и пакеты положения с оптических линеек ( обычно это отдельное устройство со своим адресом). Потеря пакетов в случае если петля ос по положению заведена через интерфейс чревата непрятностями. А если еще и рассинхронизация осей произойдет. А прерывания от ДМА по окончанию приема пакета могут перегрузить например прерывания управлени ШИМ BLDC мотора совсем уж с грустными последствиями А флуд может произойти из за банальности- портальный станок, витая пара идет на подвижную часть шпинделя, постоянно перегибается, протерлась изоляция ( именно витой пары, почему то они это любят). Появляется мерцающий контакт, свитч на станке получает кучу битых пакетов, начинается флуд. Это реальный пример, с весьма печальными финасовыми последствиями, хотя эзернет и был дублированный. После этого интерфейс подвижной части поменяли на световоды. Ну и от длительности сервоцикла зависит, мне например требовалось около 2 мсек в вышеописанном примере. Это надо было и датчики позиций осей опросить, и задание раскидать по сервоприводам, и со шпинделя скорость и позицию считать.
|
|
|
|
|
|
|
|
Oct 30 2017, 12:18
|
Гуру
Группа: Свой
Сообщений: 5 228
Регистрация: 3-07-08
Из: Омск
Пользователь №: 38 713
|
Цитата(khach @ Oct 30 2017, 15:02) Ну у нас же управление движением, по сети идут не только пакеты задания скорости, но и пакеты положения с оптических линеек ( обычно это отдельное устройство со своим адресом). Ну это у вас. Непонятно только - зачем вы тогда так сделали? У нас, например, по Ethernet осуществляется только конфигурирование. Да в будущем будет осуществляться мониторинг возможно. А задание скорости, передача положения угла ротора и др. критичные по времени операции - по специально для этого выделенным интерфейсам (даже не по общему CAN-у). Цитата(khach @ Oct 30 2017, 15:02) А прерывания от ДМА по окончанию приема пакета могут перегрузить например прерывания управлени ШИМ BLDC мотора совсем уж с грустными последствиями Не могут в принципе. Прерывания по завершению DMA генерятся когда принят очередной пакет DMA. Который в свою очередь может быть принят только если есть свободное место в очереди DMA-пакетов. А это свободное место появляется только в случае обработки и удаления из очереди одного из пакетов низкоприоритетной задачей TCP-стека. Более того - после обработки очередного RX-пакета, прерывание о завершении RX-DMA следующего пакета может генериться только одно, а на следующие пакеты прерывания генериться не будут, до момента удаления из очереди RX-DMA-пакетов хотя-бы одного пакета задачей TCP-стека. Т.е. - всё завязано на низкоприоритетную задачу TCP-стека и всё что выше её по приоритету будет работать независимо от её загрузки. Да и мест пакетов в очереди RX-DMA немного - у меня всего-то их 5 в цепочке. Если свободного места в очереди RX-DMA пакетов нет, то очередной пакет будет потерян. И выставится флажок о его потере в соотв. регистре контроллера Ethernet. Цитата(khach @ Oct 30 2017, 15:02) и со шпинделя скорость и позицию считать. В текущей задаче у нас считывание и вычисление позиции ротора занимает ~340 тактов CPU. Это вместе с фильтрацией, коррекцией нелинейности, вычислением скоростей и т.п. С ресольвера или синус-косинусных датчиков. Это на частоте >100 МГц сущие копейки... Вычисляем её каждый период ШИМ 10кГц.
|
|
|
|
|
|
|
|
Oct 30 2017, 12:34
|
Гуру
Группа: Свой
Сообщений: 3 439
Регистрация: 29-12-04
Пользователь №: 1 741
|
Цитата(jcxz @ Oct 30 2017, 14:18) Ну это у вас. Непонятно только - зачем вы тогда так сделали?
У нас, например, по Ethernet осуществляется только конфигурирование. Да в будущем будет осуществляться мониторинг возможно.
А задание скорости, передача положения угла ротора и др. критичные по времени операции - по специально для этого выделенным интерфейсам (даже не по общему CAN-у). Это не мы, это готовый общепромышленный ethercat. Если для критической информации есть отдельный CAN то конечно мои замечания теряют смысл. Цитата Если свободного места в очереди RX-DMA пакетов нет, то очередной пакет будет потерян. И выставится флажок о его потере в соотв. регистре контроллера Ethernet. Интерсный вариант. Хотя возможно и чреват рассинхронизацией, т.к доступен наиболее старый пакет. Мы наоборот старались сохранить самый последний пакет из валидных. Вот только что с броадкастами делать? Вообще их не обрабатывать? Флуд по ним самый убийственный. Цитата В текущей задаче у нас считывание и вычисление позиции ротора занимает ~340 тактов CPU. Это вместе с фильтрацией, коррекцией нелинейности и т.п.
С ресольвера или синус-косинусных датчиков. Это на частоте >100 МГц сущие копейки...
Вычисляем её каждый период ШИМ 10кГц. Ну это же не петля положения, а петля скорости. А ШИМ это вообще петля тока/момента, самая быстрая. Кстати, в случае ресолверов, что там с приоритетом прерываний АЦП? Ресолверы ведь синус-косинусом запитаны? Или два канала в квадратурах на прием? А потом обрабатывать тригонометрию. за 340 тактов никак не управится.
|
|
|
|
|
|
Сообщений в этой теме
 Jenya7 Контролер для 3-х двигателей. Jul 2 2017, 08:31 Jenya7 Контролер для 3-х двигателей. Jul 2 2017, 08:31 sigmaN У ST есть всё для моторов и даже библиотека имеетс... Jul 2 2017, 15:19 sigmaN У ST есть всё для моторов и даже библиотека имеетс... Jul 2 2017, 15:19 AlexandrY Цитата(sigmaN @ Jul 2 2017, 18:19) У ST е... Jul 2 2017, 15:54 oleg_d У семейства XMC4000 есть все что надо но только дл... Jul 2 2017, 15:55 AlexandrY Цитата(sigmaN @ Jul 2 2017, 18:19) У ST е... Jul 2 2017, 15:54 oleg_d У семейства XMC4000 есть все что надо но только дл... Jul 2 2017, 15:55 Jenya7 Цитата(sigmaN @ Jul 2 2017, 20:19) У ST е... Jul 2 2017, 16:33 sigmaN Кстати по ходу у ТСа коллекторные движки и там всё... Jul 2 2017, 15:56 AlexandrY Цитата(sigmaN @ Jul 2 2017, 18:56) Кстати... Jul 2 2017, 16:01 sigmaN Я щас тоже только что так подумал ) Jul 2 2017, 16:02 EmbedElektrik параметры энкодера и частота вращения какие? при 1... Jul 2 2017, 20:47 Jenya7 Цитата(EmbedElektrik @ Jul 3 2017, 01:47)... Jul 3 2017, 05:46 Эдди Цитата(EmbedElektrik @ Jul 2 2017, 23:47)... Jul 3 2017, 11:12 sigmaN Ну так надо сначала ж выбрать энкодеры исходя из т... Jul 3 2017, 09:04 Jenya7 Цитата(sigmaN @ Jul 3 2017, 14:04) Ну так... Jul 3 2017, 09:43 HardEgor Цитата(Jenya7 @ Jul 3 2017, 16:43) А проб... Jul 3 2017, 17:11 Эдди Цитата(HardEgor @ Jul 3 2017, 20:11) Возм... Jul 3 2017, 22:21 Maverick Цитата(Эдди @ Jul 4 2017, 01:21) Вот это,... Jul 3 2017, 22:43 Огурцов Цитата(Maverick @ Jul 3 2017, 23:43) заче... Jul 4 2017, 02:01 HardEgor Цитата(Maverick @ Jul 4 2017, 05:43) Возм... Jul 4 2017, 05:00 Эдди Цитата(Maverick @ Jul 4 2017, 01:43) Возм... Jul 4 2017, 05:17 jcxz Цитата(sigmaN @ Jul 3 2017, 12:04) А ведь... Jul 4 2017, 10:40 sigmaN Проблема в том, что ваша система не должна допусти... Jul 3 2017, 10:24 sigmaN Цитатаи вопрос "определить текущую скорость в... Jul 3 2017, 13:14 Maverick Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне ну... Jul 3 2017, 20:04 Jenya7 Цитата(Maverick @ Jul 4 2017, 02:04) так ... Jul 4 2017, 06:38 khach Для надежности как раз и применяют два STM32 - оди... Jul 4 2017, 07:19 sigmaN ЦитатаА нужно-ли принимать решение на каждом импул... Jul 4 2017, 15:05 jcxz Цитата(sigmaN @ Jul 4 2017, 18:05) Ну учи... Jul 4 2017, 15:11 sigmaN ЦитатаБольшое кол-во импульсов - это только для ув... Jul 4 2017, 15:54 jcxz Цитата(sigmaN @ Jul 4 2017, 18:54) Правил... Jul 4 2017, 16:40 khach Энкодер с аппаратным таймером считает все импульсы... Jul 4 2017, 17:45 sigmaN Ну если счётчик аппаратный тогда ОК Jul 4 2017, 20:00 Jenya7 Решил вернутся к теме. То есть как решил - жизнь з... Oct 27 2017, 08:41 HardEgor Цитата(Jenya7 @ Oct 27 2017, 15:41) Я бы ... Oct 27 2017, 12:09 Jenya7 Цитата(HardEgor @ Oct 27 2017, 17:09) Стр... Oct 27 2017, 12:13 khach Цитата(Jenya7 @ Oct 27 2017, 10:41) Я бы ... Oct 28 2017, 12:16 Jenya7 спасибо. посмотрю. Oct 29 2017, 06:32 Огурцов Цитата(Jenya7 @ Oct 27 2017, 09:41) Но се... Oct 29 2017, 08:31 khach Цитата(Огурцов @ Oct 29 2017, 10:31) эта,... Oct 29 2017, 09:35 Огурцов Цитата(khach @ Oct 29 2017, 10:35) На мик... Oct 29 2017, 12:24 khach Цитата(Огурцов @ Oct 29 2017, 14:24) а тр... Oct 29 2017, 12:55 Огурцов Цитата(khach @ Oct 29 2017, 12:55) условн... Oct 29 2017, 14:14 khach Цитата(Огурцов @ Oct 29 2017, 16:14) обыч... Oct 29 2017, 14:36 mantech Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне ну... Oct 29 2017, 08:07 Jenya7 Прихожу к мысли, что нужно делать модуль контроль+... Oct 29 2017, 10:04 mantech Цитата(Jenya7 @ Oct 29 2017, 13:04) Прихо... Oct 29 2017, 11:08 gosha-z Цитата(Jenya7 @ Oct 29 2017, 15:25) Вот р... Oct 29 2017, 14:40 jcxz Цитата(khach @ Oct 30 2017, 13:53) Контро... Oct 30 2017, 11:33 jcxz Цитата(khach @ Oct 30 2017, 15:34) Интерс... Oct 30 2017, 12:46 AlexandrY Цитата(jcxz @ Oct 30 2017, 14:18) Прерыва... Oct 30 2017, 13:24 jcxz Цитата(AlexandrY @ Oct 30 2017, 16:24) А ... Oct 30 2017, 13:38 mantech Цитата(jcxz @ Oct 30 2017, 16:38) А что -... Oct 30 2017, 14:31 Огурцов Цитата(khach @ Oct 30 2017, 11:53) Контро... Oct 30 2017, 12:22 AlexandrY Цитата(khach @ Oct 29 2017, 17:35) Это хо... Oct 29 2017, 18:29 Jenya7 Цитата(AlexandrY @ Oct 29 2017, 19:58) Хо... Oct 30 2017, 07:11 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 09:11) а где... Oct 30 2017, 07:34 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 12:34) От... Oct 30 2017, 07:43 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 09:43) да. с... Oct 30 2017, 08:51 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 13:51) Пе... Oct 30 2017, 09:22 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 11:22) понял... Oct 30 2017, 09:33 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 14:33) Бе... Oct 30 2017, 09:38 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 11:38) я пон... Oct 30 2017, 10:07 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 15:07) Ес... Oct 30 2017, 10:40 Dog Pawlowa 5 страниц, задача не озвучена.
Управление мотором:... Oct 30 2017, 16:20 Jenya7 Нашел вот такое чудо.
http://www.allegromicro.com/... Nov 15 2017, 08:22 Tanya Цитата(Jenya7 @ Nov 15 2017, 11:22) Это ж... Nov 15 2017, 08:29 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 10:22) Нашел... Nov 15 2017, 09:52 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 15:52) Он... Nov 15 2017, 10:02 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 11:56) А есл... Nov 15 2017, 10:07 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:07) То... Nov 15 2017, 10:10 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 12:10) там т... Nov 15 2017, 10:20 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:20) Да... Nov 15 2017, 10:37 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 12:37) так м... Nov 15 2017, 10:46 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:46) А ... Nov 15 2017, 11:00 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 13:00) ну во... Nov 15 2017, 11:05 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 17:05) TA... Nov 15 2017, 11:14 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 13:14) а как... Nov 15 2017, 12:08 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 18:08) Си... Nov 15 2017, 12:22 mantech Цитата(Jenya7 @ Nov 15 2017, 13:02) Не по... Nov 15 2017, 13:12 Jenya7 Цитата(mantech @ Nov 15 2017, 19:12) В че... Nov 15 2017, 13:27 mantech Цитата(Jenya7 @ Nov 15 2017, 16:27) боязн... Nov 15 2017, 19:01 Aner QUOTE (Jenya7 @ Nov 15 2017, 12:22) Нашел... Nov 15 2017, 09:53 Jenya7 Цитата(sigmaN @ Jul 2 2017, 20:19) У ST е... Jul 2 2017, 16:33 sigmaN Кстати по ходу у ТСа коллекторные движки и там всё... Jul 2 2017, 15:56 AlexandrY Цитата(sigmaN @ Jul 2 2017, 18:56) Кстати... Jul 2 2017, 16:01 sigmaN Я щас тоже только что так подумал ) Jul 2 2017, 16:02 EmbedElektrik параметры энкодера и частота вращения какие? при 1... Jul 2 2017, 20:47 Jenya7 Цитата(EmbedElektrik @ Jul 3 2017, 01:47)... Jul 3 2017, 05:46 Эдди Цитата(EmbedElektrik @ Jul 2 2017, 23:47)... Jul 3 2017, 11:12 sigmaN Ну так надо сначала ж выбрать энкодеры исходя из т... Jul 3 2017, 09:04 Jenya7 Цитата(sigmaN @ Jul 3 2017, 14:04) Ну так... Jul 3 2017, 09:43 HardEgor Цитата(Jenya7 @ Jul 3 2017, 16:43) А проб... Jul 3 2017, 17:11 Эдди Цитата(HardEgor @ Jul 3 2017, 20:11) Возм... Jul 3 2017, 22:21 Maverick Цитата(Эдди @ Jul 4 2017, 01:21) Вот это,... Jul 3 2017, 22:43 Огурцов Цитата(Maverick @ Jul 3 2017, 23:43) заче... Jul 4 2017, 02:01 HardEgor Цитата(Maverick @ Jul 4 2017, 05:43) Возм... Jul 4 2017, 05:00 Эдди Цитата(Maverick @ Jul 4 2017, 01:43) Возм... Jul 4 2017, 05:17 jcxz Цитата(sigmaN @ Jul 3 2017, 12:04) А ведь... Jul 4 2017, 10:40 sigmaN Проблема в том, что ваша система не должна допусти... Jul 3 2017, 10:24 sigmaN Цитатаи вопрос "определить текущую скорость в... Jul 3 2017, 13:14 Maverick Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне ну... Jul 3 2017, 20:04 Jenya7 Цитата(Maverick @ Jul 4 2017, 02:04) так ... Jul 4 2017, 06:38 khach Для надежности как раз и применяют два STM32 - оди... Jul 4 2017, 07:19 sigmaN ЦитатаА нужно-ли принимать решение на каждом импул... Jul 4 2017, 15:05 jcxz Цитата(sigmaN @ Jul 4 2017, 18:05) Ну учи... Jul 4 2017, 15:11 sigmaN ЦитатаБольшое кол-во импульсов - это только для ув... Jul 4 2017, 15:54 jcxz Цитата(sigmaN @ Jul 4 2017, 18:54) Правил... Jul 4 2017, 16:40 khach Энкодер с аппаратным таймером считает все импульсы... Jul 4 2017, 17:45 sigmaN Ну если счётчик аппаратный тогда ОК Jul 4 2017, 20:00 Jenya7 Решил вернутся к теме. То есть как решил - жизнь з... Oct 27 2017, 08:41 HardEgor Цитата(Jenya7 @ Oct 27 2017, 15:41) Я бы ... Oct 27 2017, 12:09 Jenya7 Цитата(HardEgor @ Oct 27 2017, 17:09) Стр... Oct 27 2017, 12:13 khach Цитата(Jenya7 @ Oct 27 2017, 10:41) Я бы ... Oct 28 2017, 12:16 Jenya7 спасибо. посмотрю. Oct 29 2017, 06:32 Огурцов Цитата(Jenya7 @ Oct 27 2017, 09:41) Но се... Oct 29 2017, 08:31 khach Цитата(Огурцов @ Oct 29 2017, 10:31) эта,... Oct 29 2017, 09:35 Огурцов Цитата(khach @ Oct 29 2017, 10:35) На мик... Oct 29 2017, 12:24 khach Цитата(Огурцов @ Oct 29 2017, 14:24) а тр... Oct 29 2017, 12:55 Огурцов Цитата(khach @ Oct 29 2017, 12:55) условн... Oct 29 2017, 14:14 khach Цитата(Огурцов @ Oct 29 2017, 16:14) обыч... Oct 29 2017, 14:36 mantech Цитата(Jenya7 @ Jul 2 2017, 11:31) Мне ну... Oct 29 2017, 08:07 Jenya7 Прихожу к мысли, что нужно делать модуль контроль+... Oct 29 2017, 10:04 mantech Цитата(Jenya7 @ Oct 29 2017, 13:04) Прихо... Oct 29 2017, 11:08 gosha-z Цитата(Jenya7 @ Oct 29 2017, 15:25) Вот р... Oct 29 2017, 14:40 jcxz Цитата(khach @ Oct 30 2017, 13:53) Контро... Oct 30 2017, 11:33 jcxz Цитата(khach @ Oct 30 2017, 15:34) Интерс... Oct 30 2017, 12:46 AlexandrY Цитата(jcxz @ Oct 30 2017, 14:18) Прерыва... Oct 30 2017, 13:24 jcxz Цитата(AlexandrY @ Oct 30 2017, 16:24) А ... Oct 30 2017, 13:38 mantech Цитата(jcxz @ Oct 30 2017, 16:38) А что -... Oct 30 2017, 14:31 Огурцов Цитата(khach @ Oct 30 2017, 11:53) Контро... Oct 30 2017, 12:22 AlexandrY Цитата(khach @ Oct 29 2017, 17:35) Это хо... Oct 29 2017, 18:29 Jenya7 Цитата(AlexandrY @ Oct 29 2017, 19:58) Хо... Oct 30 2017, 07:11 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 09:11) а где... Oct 30 2017, 07:34 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 12:34) От... Oct 30 2017, 07:43 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 09:43) да. с... Oct 30 2017, 08:51 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 13:51) Пе... Oct 30 2017, 09:22 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 11:22) понял... Oct 30 2017, 09:33 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 14:33) Бе... Oct 30 2017, 09:38 AlexandrY Цитата(Jenya7 @ Oct 30 2017, 11:38) я пон... Oct 30 2017, 10:07 Jenya7 Цитата(AlexandrY @ Oct 30 2017, 15:07) Ес... Oct 30 2017, 10:40 Dog Pawlowa 5 страниц, задача не озвучена.
Управление мотором:... Oct 30 2017, 16:20 Jenya7 Нашел вот такое чудо.
http://www.allegromicro.com/... Nov 15 2017, 08:22 Tanya Цитата(Jenya7 @ Nov 15 2017, 11:22) Это ж... Nov 15 2017, 08:29 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 10:22) Нашел... Nov 15 2017, 09:52 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 15:52) Он... Nov 15 2017, 10:02 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 11:56) А есл... Nov 15 2017, 10:07 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:07) То... Nov 15 2017, 10:10 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 12:10) там т... Nov 15 2017, 10:20 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:20) Да... Nov 15 2017, 10:37 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 12:37) так м... Nov 15 2017, 10:46 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 16:46) А ... Nov 15 2017, 11:00 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 13:00) ну во... Nov 15 2017, 11:05 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 17:05) TA... Nov 15 2017, 11:14 AlexandrY Цитата(Jenya7 @ Nov 15 2017, 13:14) а как... Nov 15 2017, 12:08 Jenya7 Цитата(AlexandrY @ Nov 15 2017, 18:08) Си... Nov 15 2017, 12:22 mantech Цитата(Jenya7 @ Nov 15 2017, 13:02) Не по... Nov 15 2017, 13:12 Jenya7 Цитата(mantech @ Nov 15 2017, 19:12) В че... Nov 15 2017, 13:27 mantech Цитата(Jenya7 @ Nov 15 2017, 16:27) боязн... Nov 15 2017, 19:01 Aner QUOTE (Jenya7 @ Nov 15 2017, 12:22) Нашел... Nov 15 2017, 09:53
2 чел. читают эту тему (гостей: 2, скрытых пользователей: 0)
Пользователей: 0
|
|
|