Всем доброго дня. Неожиданно столкнулся с такой проблемой.
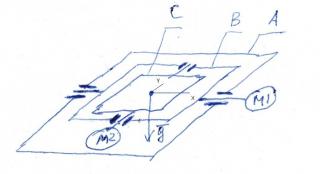
Есть механика, на рисунке. Внутренняя рамка С может поворачиваться вокруг осей Х и У относительно рамки А моторами М1 и М2. Вся система располагается в море, на корабле. Рамка А прикреплена жестко к кораблю. Задача - стабилизировать рамку С, так чтобы ее нормаль (g) совпадала с вектором гравитации.
Допустим, устанавливаю на рамку С гироскоп и акселерометр (трехосевые). При старте все хорошо - я точно знаю, как располагается подвижная система координат и точно знаю, что угол поворота вокруг оси Х я могу компенсировать мотором М1, а вокруг У- мотором М2. Гироскопы неизбежно плывут - с этим ничего не поделать. И если уплывания по осям Х и У можно компенсировать, зная вектор гравитации (измеряю акселерометром), то уплывание по оси g пока не вижу способа компенсировать. Да и компенсировать собственно не надо, проблема в том, что из-за этого уплывания со временем, когда уплывание достигнет например, 90 градусов, то мотором М1 я уже буду крутить кватернион вокруг оси Y, а мотором М1 - вокруг Х. Как-то бы привязать кватернион по оси g к рамке А.
Привязывать отдельно рамку А и отдельно кватернион к одной глобальной системе координат (например, по компасу) нет возможности.
Вопрос такой: как-то можно определить, каким мотором крутить, чтобы компенсировать появившийся крен рамки С? Т.е. крен -то я из кватерниона вытащу и разложу на составляющие по осям Х и У, а как определить, как сейчас расположены оси Х и У подвижной системы координат относительно осей моторов?
PS охота именно комплексно, через кватернионы решить задачу, а не отдельно по каждой оси мерить и компенсировать угловые скорости.
Эскизы прикрепленных изображений

















 Apr 25 2018, 18:55
Apr 25 2018, 18:55