| |
 Кватернионы и реальная механика Кватернионы и реальная механика, Вопрос синхронизации |
|
|
|
|
 Apr 25 2018, 18:55 Apr 25 2018, 18:55
|
Профессионал

Группа: Свой
Сообщений: 1 284
Регистрация: 9-04-06
Пользователь №: 15 968

|
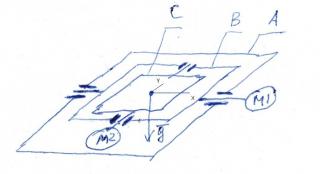
Всем доброго дня. Неожиданно столкнулся с такой проблемой. Есть механика, на рисунке. Внутренняя рамка С может поворачиваться вокруг осей Х и У относительно рамки А моторами М1 и М2. Вся система располагается в море, на корабле. Рамка А прикреплена жестко к кораблю. Задача - стабилизировать рамку С, так чтобы ее нормаль (g) совпадала с вектором гравитации. Допустим, устанавливаю на рамку С гироскоп и акселерометр (трехосевые). При старте все хорошо - я точно знаю, как располагается подвижная система координат и точно знаю, что угол поворота вокруг оси Х я могу компенсировать мотором М1, а вокруг У- мотором М2. Гироскопы неизбежно плывут - с этим ничего не поделать. И если уплывания по осям Х и У можно компенсировать, зная вектор гравитации (измеряю акселерометром), то уплывание по оси g пока не вижу способа компенсировать. Да и компенсировать собственно не надо, проблема в том, что из-за этого уплывания со временем, когда уплывание достигнет например, 90 градусов, то мотором М1 я уже буду крутить кватернион вокруг оси Y, а мотором М1 - вокруг Х. Как-то бы привязать кватернион по оси g к рамке А. Привязывать отдельно рамку А и отдельно кватернион к одной глобальной системе координат (например, по компасу) нет возможности. Вопрос такой: как-то можно определить, каким мотором крутить, чтобы компенсировать появившийся крен рамки С? Т.е. крен -то я из кватерниона вытащу и разложу на составляющие по осям Х и У, а как определить, как сейчас расположены оси Х и У подвижной системы координат относительно осей моторов? PS охота именно комплексно, через кватернионы решить задачу, а не отдельно по каждой оси мерить и компенсировать угловые скорости.
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
 |
Ответов
|
|
Apr 26 2018, 10:38
|

Йа моск ;)
Группа: Модераторы
Сообщений: 4 345
Регистрация: 7-07-05
Из: Kharkiv-city
Пользователь №: 6 610
|
QUOTE По задумке и надо сделать такую поправку, которая будет держать совпадающими оси кватерниона и механики. Но критерий совпадения осей какой? И надо не просто информацию о совпадении осей, надо еще и информацию хотя бы о градиенте рассогласования, чтобы знать, в какую сторону кватернион крутить. Еще раз повторюсь, заканчивайте с кватернионами. Рассматривайте физический смысл. Неважно, как Вы интегрируете данные IMU (кватернион, DCM - пофиг), у Вас должны быть две функции - одна - это пересчет вектора из системы координат IMU в звездную систему координат, и вторая - наоборот (если работать с DCM - то там все банально, сама по себе DCM и есть матрица пересчета из одной системы координат в другую, а пересчет в обратную сторону - это умножение на обратную матрицу). Вот, например, Вы измеряете вектор гравитации - этот вектор в системе координат IMU. Если Вы его пропустите через функцию перехода в звездную систему координат, то этот вектор будет представлять из себя вектор, у которого x, y равны 0, а z равен g. Когда x и y ненулевые - это и есть ошибка. Но можно точно так же переводить и не только вектора измерений, но и вектора ошибки. Т.е. если Вы возьмете вектор [cos(a-va),sin(a-va),0], где а - референсный курс, а va - курс по результатам интегрирования, то это будет вектор ошибки по курсу в звездной системе координат. Преобразовав этот вектор в систему координат IMU как раз и получатся ошибки по каждой из осей. Дальше PI-регулятор и добавка к данным с гироскопа. Все.
--------------------
"Практика выше (теоретического) познания, ибо она имеет не только достоинство всеобщности, но и непосредственной действительности." - В.И. Ленин
|
|
|
|
|
|
|
|
Apr 26 2018, 11:04
|
Профессионал
Группа: Свой
Сообщений: 1 284
Регистрация: 9-04-06
Пользователь №: 15 968
|
Цитата(Rst7 @ Apr 26 2018, 14:38)  Вы возьмете вектор [cos(a-va),sin(a-va),0], где а - референсный курс, а va - курс по результатам интегрирования, то это будет вектор ошибки по курсу в звездной системе координат. Преобразовав этот вектор в систему координат IMU как раз и получатся ошибки по каждой из осей. Дальше PI-регулятор и добавка к данным с гироскопа. Все. Хорошо, рефренсный курс равен 0, va - курс по результатам интегрирования. Но повторюсь, если бы механика лежала на столе, это бы сработало, но сама механика на корабле тоже вращается, поэтому курс по результатам интегрирования - это сумма: поворот корабля + уплывание гироскопа. Как отсюда выделить уплывание чтобы вычислить собственно разницу между курсом механики и курсом по результатам интегрирования? Цитата энкодеры на оси приделайте Так они есть, что это дает?
|
|
|
|
|
|
Сообщений в этой теме
 alexPec Кватернионы и реальная механика Apr 25 2018, 18:55 alexPec Кватернионы и реальная механика Apr 25 2018, 18:55 AlexandrY Цитата(alexPec @ Apr 25 2018, 21:55) а ка... Apr 25 2018, 19:08 AlexandrY Цитата(alexPec @ Apr 25 2018, 21:55) а ка... Apr 25 2018, 19:08  alexPec Цитата(AlexandrY @ Apr 25 2018, 23:08) Та... Apr 25 2018, 19:28 AlexandrY Цитата(alexPec @ Apr 25 2018, 22:28) И че... Apr 25 2018, 20:01 alexPec Цитата(AlexandrY @ Apr 26 2018, 00:01) Да... Apr 26 2018, 05:47 AlexandrY Цитата(alexPec @ Apr 26 2018, 08:47) Да к... Apr 26 2018, 06:11 alexPec Цитата(AlexandrY @ Apr 26 2018, 10:11) Ду... Apr 26 2018, 06:41 тау Цитата(alexPec @ Apr 25 2018, 22:55) Зада... Apr 26 2018, 05:50 alexPec Цитата(тау @ Apr 26 2018, 09:50) почему н... Apr 26 2018, 05:59 тау Цитата(alexPec @ Apr 26 2018, 09:59) Груз... Apr 26 2018, 06:55 Aner QUOTE (тау @ Apr 26 2018, 09:55) добавьте... Apr 26 2018, 09:01 alexPec Цитата(тау @ Apr 26 2018, 10:55) добавьте... Apr 26 2018, 09:49 Rst7 Я что-то не совсем понимаю, в чем проблема.
Вари... Apr 26 2018, 08:23 AlexandrY Цитата(Rst7 @ Apr 26 2018, 11:23) В коде,... Apr 26 2018, 08:39 krux энкодеры на оси приделайте Apr 26 2018, 10:50 Rst7 QUOTE Как отсюда выделить уплывание чтобы вычислит... Apr 26 2018, 11:38 alexPec Цитата(Rst7 @ Apr 26 2018, 15:38) Да не н... Apr 27 2018, 19:53 alexPec Цитата(AlexandrY @ Apr 25 2018, 23:08) Та... Apr 25 2018, 19:28 AlexandrY Цитата(alexPec @ Apr 25 2018, 22:28) И че... Apr 25 2018, 20:01 alexPec Цитата(AlexandrY @ Apr 26 2018, 00:01) Да... Apr 26 2018, 05:47 AlexandrY Цитата(alexPec @ Apr 26 2018, 08:47) Да к... Apr 26 2018, 06:11 alexPec Цитата(AlexandrY @ Apr 26 2018, 10:11) Ду... Apr 26 2018, 06:41 тау Цитата(alexPec @ Apr 25 2018, 22:55) Зада... Apr 26 2018, 05:50 alexPec Цитата(тау @ Apr 26 2018, 09:50) почему н... Apr 26 2018, 05:59 тау Цитата(alexPec @ Apr 26 2018, 09:59) Груз... Apr 26 2018, 06:55 Aner QUOTE (тау @ Apr 26 2018, 09:55) добавьте... Apr 26 2018, 09:01 alexPec Цитата(тау @ Apr 26 2018, 10:55) добавьте... Apr 26 2018, 09:49 Rst7 Я что-то не совсем понимаю, в чем проблема.
Вари... Apr 26 2018, 08:23 AlexandrY Цитата(Rst7 @ Apr 26 2018, 11:23) В коде,... Apr 26 2018, 08:39 krux энкодеры на оси приделайте Apr 26 2018, 10:50 Rst7 QUOTE Как отсюда выделить уплывание чтобы вычислит... Apr 26 2018, 11:38 alexPec Цитата(Rst7 @ Apr 26 2018, 15:38) Да не н... Apr 27 2018, 19:53
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|