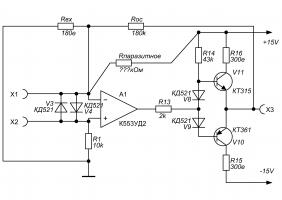
вообще мое описание в посте 29 кривоватое то что 1В и 10мВ складываются. В случае идеального ОУ на неиверт входе должно быть 0В тогда I(Rвх)=-I(Rос) куда эти 10мВ приладить? Я думаю понятнее будет изобразить Rпаразит как на рисунке ou1
только это сопротивление внутри микросхемы.
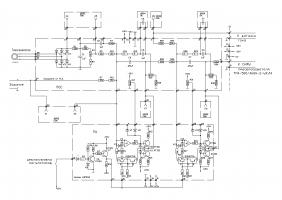
отдельный разговор как сделана обратная связь по скорости.
асинхронный тахо генератор ТТ180 выходное напряжение (синусоида) амплитуда и частота его зависит от скорости вращения. Допустим что зависимость линейная. Но на выпрямителе вносится доп ошибка падение на мосте. С выхода выпрямителя получим напряжение амплитудой на 0,6В*2 (возьмем для простоты 1В) меньше чем входное, можно считать это напряжение ошибки постоянное по величине и не зависит от скорости.
Рабочие значения напряжений после выпрямителя от 40 до 150 вольт (для скорости машины от 50 до 100 м/мин.) получаем погрешность от -((1-40/41)*100%)=-2,4% до -((1-150/1511)*100%)=-0,67% минус значит датчик скорости занижает измеряемый параметр. Теоретически эту отрицательную погрешность можно было скомпенсировать фиксированным положительным смещением по входу ОУ (это дополнительное сопротивление подключенное к стабильному источнику) но в схеме этого нет. Uсм ОУ для этих целей не годится тк нестабильное и особо не нормируется у разных образцов может сильно отличаться( сам замерял).
Сообщение отредактировал NicSm - Dec 11 2008, 01:50

















 Dec 6 2008, 15:54
Dec 6 2008, 15:54