Цитата(Duhas @ Sep 22 2009, 18:44)

повторюсь - ТЗ как такового не существует... собирается нечто вроде стенда, для практически любого ДПТ...
Если, что - ТЗ Исполнитель пишет сам себе

По ГОСТ-у
Так, что не составляет труда "нарисовать" самому себе круг требований и ограничений.
"Практически любой ДПТ" - это может быть, начиная от ДПМ до многокиловатного привода прокатного стана.
Не может быть универсального стенда для "любого" ДПТ.
Опять же испытание привода без реальной нагрузки или ее модели - кому оно надо.
Я плохо представляю себе стенд с возможностью задания любого встречающегося в практике типа нагрузки.
Так, что и здесь наверняка есть ( известна ) область применения.
P.S.
Примеры отработки пусковых и нагрузочных режимов на условном ДПТ с той или иной САУ или без.

Прямой пуск без обратных связей
Wo = 160 рад/c;
М1 = 1 Н*м;
Id = 1.5 A;

Прямой пуск без обратных связей + наброс нагрузки М4 = 4 Н*м
Wo = 93 рад/c;
М = М1 + М4 = 5 Н*м;
Id = 5.8 A;
Im = 14 A
Как видим, характеристика двигателя довольно мягкая и просадка скорости составила 42%
Кратность пускового тока довольно высокая Ki = Im/Id = 2.4

Прямой пуск +ООС по току с отсечкой + наброс нагрузки М4 = 4 Н*м
Wo = 93 рад/c;
М = М1 + М4 = 5 Н*м;
Id = 1.5 A;
Im = 8.5 A
Кратность пускового тока уменьшена Ki = Im/Id = 1.5

Обратная связь по скорости
Wo = 155.7 рад/c;
М1 = 1 Н*м;
Id = 1.4 A;
Im >> Id
+ наброс нагрузки M4 = 4 Н*м
Wo = 154.9 рад/c;
М = М1 + М4 = 5 Н*м;
Id = 5.86 A;
Im >> Id
Характеристика системы жесткая ( погрешность поддержания скорости при возмущающих
воздействиях не более 0.5%
Кратность тока недопустимо высока.

Обратная связь по скорости + ООС по току с отсечкой + наброс нагрузки
Wo = 154.9 рад/c;
М = 5 Н*м;
Id = 5.86 A;
Im = 9 А
Ki = 1.6
Т.е. получаем высокоточный привод + ограничение пусковых токов.

Для любителей ПИД регулятора + ООС по току с отсечкой имеем
Скорость при М1=1 Н*м W1 = 156.9 рад/с
Скорость при набросе нагрузки W2 = 156.6 рад/с
Статическая погрешность снизилась с 0.5% до 0.2 % и кроме того, уменьшены погрешности в переходных режимах ( пуск и наброс нагрузки).
P.S.
На токовых графиках пульсации тока - это не погрешность расчета.
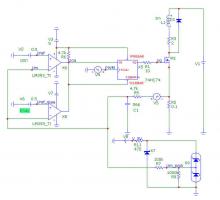
В модельную схему вставлен тиристорный источник питания ( однофазный полно-управляемый мост, частота сети 50 Гц ).
Именно поэтому от R-датчика тока ( нет дополнительной фильтрации ) получаем небольшую пульсацию сигнала. Как заметно, она не мешает процессу регулирования. Возможно "легкая" фильтрация сигнала от датчика не помешает.
P.P.S.
Хэх.. Сейчас посмотрел - оказывается модель датчика тока сделал апериодическим звеном с постоянной времени 5 мс.

















 Aug 17 2009, 00:59
Aug 17 2009, 00:59