| |
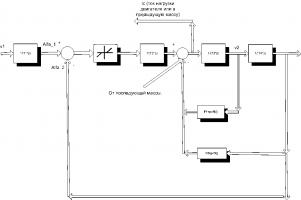
 Алгоритм позиционирования Алгоритм позиционирования, при использовании энкодера 45 имп/об |
|
|
|
|
 Nov 20 2008, 07:03 Nov 20 2008, 07:03
|

Познающий...

Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125

|
Здравствуйте! Тема перекочевала отсюда.В моем приводе это вопрос позиционирования встал ребром. По началу я не считал эту задачу сложной, но теперь понял, что все не так просто... Застабилизировать скорость, когда вал должен просто вращаться, оказалось делом не сложным. PI регулятор работает. Но вот вопрос позиционирования раскусить не могу... то, что смог реализовать работает с затухающими колебаниями относительно точки, в которую приводу нужно уйти. Привожу код, который сможет пояснить суть алгоритма. Но общий принцип такой: берется рассогласованиее по координатам, которое домножается на некоторой коэффициент posTolPGain (пропорциональная часть), получаем скорость, на которой приказываем приводу двигаться. По мере приближения к заданной точке, рассогласование будет уменьшаться, пока не достигнет того минимума, при котором привод останавливается. Остается некоторая ошибка. Эта ошибка (ее величина определяется переменной posTolerance), компенсируется следующей ступенью пропорционального регулятора, у которого коэффициент posTolPGain1, который много больше, чем posTolPGain, в силу малости ошибки. Перввая ступень регулятора работает великолепно, но всегда остается ошибка. Вторая ступень дает колебания. Будут ли они затухающими, или нет, зависит от posTolPGain1, но они есть всегда... Мне не приходит идея, что делать? Использовать еще и интегральную составляющую для устранения ошибки позиционирования? Но это уже будет целых два ПИ-регулятора со своими коэффициентами... многовато их получается... Есть ли какие-нибудь идей у уважаемых профессионалов? Спасибо! Да, датчик обратной связи - энкодер. Больше ничего нет..., и добалять нельзя. Привода аппаратно готов и какой бы ущербный он не был, придется придумывать, как реализовать позиционирование на энкодере. Код /*
This function must be called every 5 ms in Position Mode
IN:
pos - desired position
OUT:
servo result codes
*/
uint8_t TServoControl::positionModeProcess(int16_t pos)
{
int32_t pos_tolerance = pos - getPosition();
int32_t dp = pos_tolerance;
if(dp < 0)
dp*= -1L;
if(dp > posTolerance)
{
int32_t vel = ((pos - getPosition()) * posTolPGain) / 128L;
if(vel > 0)
{
if(vel > velocityLimit)
vel = velocityLimit;
}
else
if(vel < 0)
{
if(vel < -velocityLimit)
vel = -velocityLimit;
}
velocityModeProcess(vel);
}
else
{
int16_t s_pwm = pos_tolerance * posTolPGain1 / 128L;
if(s_pwm > 0)
setServoMode(SERVO_POS_VELOCITY_MODE);
else
if(s_pwm < 0)
{
setServoMode(SERVO_NEG_VELOCITY_MODE);
s_pwm*= -1;
}
if(s_pwm > 250L)
s_pwm = 250;
if(s_pwm)
setPWM((uint8_t)s_pwm);
else
setServoMode(SERVO_FAST_STOP_MODE);
}
return SERVO_OK_RESULT;
} Требования не высокие: нужно просто перемещаться из текущей точки в заданную. Ускорение и максимальная скорость, до которой разгоняемя - задаются. Погрешность допустима.. ну сколько, даже не знаю как выразить. Ну вал двигателя может провернуться или не довернуться процентов на 20 - 40 от того значения, которое соответсвует заданной координате. Извините за доморощенные термины. Ну вот, пока вроде все.
--------------------
Выбор.
|
|
|
|
|
|
|
 |
Ответов
(90 - 104)
|
|
Dec 5 2008, 10:50
|

чукчхэшаражогрмонтажник
Группа: Участник
Сообщений: 1 852
Регистрация: 13-07-07
Из: Minsk
Пользователь №: 29 094
|
[color=#000000] Цитата(dpss @ Dec 5 2008, 13:50)  Нельзя ли по подробнее рассказать, как учитывается - компенсируется нелинейное трение в системе. Лучше иметь хорошую механику.  Компенсируют, понятно, увеличением тока (момента), учитывают программно - наблюдателем и планировщиком траекторного движения. Статейки. NONLINEAR FRICTION PHENOMENA IN DIRECT-DRIVE ROBOTIC ARMS. Friction compensation. Observer-based nonlinear Compensation of Friction.
Сообщение отредактировал evgeny_ch - Dec 5 2008, 10:53
--------------------
Quo vadis?
|
|
|
|
|
|
|
|
Dec 5 2008, 14:23
|
чукчхэшаражогрмонтажник
Группа: Участник
Сообщений: 1 852
Регистрация: 13-07-07
Из: Minsk
Пользователь №: 29 094
|
Цитата(PhX @ Dec 5 2008, 16:55) Не всегда. Для придания жесткости руки роботов часто делают из монолитных болванок. Они получаются тяжеленные и момент инерции, ну сами понимаете... А машет такой робот лазером весом 1-2 кг. Если вместо болванок руку делать из алюминиевых прутов, то массово-инерционные свойства руки значительно улучшаются, но вот связи становятся гибкими... Вообщем однозначно сказать, что лучше нельзя. Можно. Удельная тяга должна быть максимально возможной. Для манипуляторов, естественно, находят компромисс между подвижной массой, жесткостью и тягой привода. По этой причине максимально достижимая точность у них ограничена, особенно у тех, что в угловых координатах. Для компенсации провисов и смещения центра массы используют алгоритмы обучения и автонастройки привода. Высокоточные координатные системы (станочные) стремятся сделать максимально жёской конструкции. Дискретность их перемещений достигает десятков нанометров, а у манипулаторов 0,05 - 0,1 мм. Гдето так.
--------------------
Quo vadis?
|
|
|
|
|
|
|
|
Dec 5 2008, 17:45
|
Местный
Группа: Свой
Сообщений: 278
Регистрация: 18-01-05
Из: Санкт-Петербург
Пользователь №: 2 031
|
Цитата Далее в этой точки стоим и не даем себя сдвинуть, те сопротивляемся возмущениям. Ну дык вы упоминали, что люфты есть. Попробуйте замерить люфт в нескольких точках сразу после включения установки и после того как механику погоняете часик другой в рабочем режиме. Люфты будут разные, а значит, замкнуть обратную связь можно только двумя способами: 1. Математически, учитывая, что люфт может быть разный на разных рабочих участках и что он будет изменяться при изменении температуры механики. 2. Практически, поставив линейный датчик непосредственно на подвижные части. Конечно если у вас все оси круговые или люфт меньше разрешающей способности вашего датчика, то это всё не актуально
|
|
|
|
|
|
|
|
Dec 22 2008, 10:13
|
Познающий...
Группа: Свой
Сообщений: 2 963
Регистрация: 1-09-05
Из: г. Иркутск
Пользователь №: 8 125
|
Цитата(PhX @ Dec 16 2008, 15:26) Да, стоящий ресурс!  Ага, стоящий) Все еще по нему занимаюсь. Цитата(alexander55 @ Nov 27 2008, 13:57) ЭДС (E=Ke*w) - расчетная величина. Отсюда и все проблемы.
U=E+I*R+L*dI/dt
R - меняется от температуры,
составляющую L*dI/dt учитывать достаточно сложно.
Но в контурных системах есть некоторое упрощение из-за наличия датчика положения (не требуется выдерживать точно угловую скорость двигателя, т.к. "вытягивание" производится за счет датчика положения). Но учитывая, что такой метод все-таки встречается, хотелось бы примерно узнать, на какая максимальная погрешность может быть в измерении скорости при наихудших условиях? Я понимаю, что вопрос абстрактен и данных мало... если что, просьба сильно не ругаться. К сожалению, мало чего находится в гугле по запросу "sensorless control brushed dc motor" 
--------------------
Выбор.
|
|
|
|
|
|
|
|
Dec 22 2008, 10:39
|
чукчхэшаражогрмонтажник
Группа: Участник
Сообщений: 1 852
Регистрация: 13-07-07
Из: Minsk
Пользователь №: 29 094
|
Цитата(haker_fox @ Dec 22 2008, 14:13) Ага, стоящий) Все еще по нему занимаюсь. Но учитывая, что такой метод все-таки встречается, хотелось бы примерно узнать, на какая максимальная погрешность может быть в измерении скорости при наихудших условиях? Я понимаю, что вопрос абстрактен и данных мало... если что, просьба сильно не ругаться. К сожалению, мало чего находится в гугле по запросу "sensorless control brushed dc motor" График посмотрите. Поиск попробуйте - temperature dependence back emf voltage DC brush motor.
--------------------
Quo vadis?
|
|
|
|
|
|
|
|
Dec 22 2008, 10:44
|
чукчхэшаражогрмонтажник
Группа: Участник
Сообщений: 1 852
Регистрация: 13-07-07
Из: Minsk
Пользователь №: 29 094
|
Цитата(haker_fox @ Dec 22 2008, 14:40) evgeny_ch, спасибо! Вы как всегда на высоте и аргументируете свои ответы ссылками, графиками, схемами...  Константа мотора имеет сложную зависимость от температуры, поскольку меняется несколько параметров, в вашем сл. будет критичным сопр. коллектора - 0,4% на градус.
--------------------
Quo vadis?
|
|
|
|
|
|
|
 |
2 чел. читают эту тему (гостей: 2, скрытых пользователей: 0)
Пользователей: 0

|
|
|