Версия для печати темы
Нажмите сюда для просмотра этой темы в обычном формате
Форум разработчиков электроники ELECTRONIX.ru _ Цифровые схемы, высокоскоростные ЦС _ Выбор микросхемы для временной синхронизации устройств
Автор: Art55555 Jul 3 2018, 07:16
Требуется микросхема, с помощью которой была бы возможность максимально точно синхронизировать по времени работу нескольких устройств. По GPS планирую получать реальное время, а специальный сигнал (обычно раз в секунду) использовать для корректировки такта основного такта.
Нашёл 3 варианта.
GPS-500 Double Oven GPSDO
NEO-M8P-2
IQCM-110
Был ли у кого опыт работы с данными штуками или кто-нибудь может посоветовать что-то ещё?
Автор: _Anatoliy Jul 3 2018, 17:39

Давно уже применяю приёмники Lassen IQ и Condor. Они из цикла - запаял и забыл, никогда не было проблем.
Автор: polyakovav Jul 4 2018, 18:34
Выбор зависит от необходимой точности.
До микросекунды по времени и 10-7 по частоте подойдет практически любой приемник.
Если нужно лучше, посмотрите на питерские http://electronix.ru/redirect.php?http://www.morion.com.ru/rus/oscillators/
У них есть и устойчивые к вибрации.
Автор: bloody-wolf Jul 4 2018, 19:10
Если нужна именно микросхема, например чтобы раздавать синхроклоки по плате - то например гляньте AD9548
Автор: Art55555 Jul 11 2018, 13:10
Спасибо за ответы.
Тем не менее, интересны в основном, параметры сигнала синхронизации (10 МГц или PPS-сигнала) - самый главный параметр, низкий джиттер этих сигналов.
На втором месте - габариты, потребление, чувствительность приёмника GPS.
По этим параметрам все предложения имеют значения 20-50 ns, против 8 у IQCM-110.
Также необходимо на разных устройствах иметь одинаковую "подкраску" времени.
Автор: faa Jul 12 2018, 08:21
А в какой доке написано про 8нс у IQCM-110?
Я в OCXO Specification IQCM-110
нашел только это:
Accuracy when locked to GPS:
Initial Lock Status (<30mins locked to GPS): ±200ns max
Full Lock (>30mins locked to GPS): ±80ns max
Steady Lock State (>24hrs GPS lock): 25ns RMS max
Автор: Art55555 Jul 12 2018, 12:08
Я в OCXO Specification IQCM-110
нашел только это:
Это про 10-МГц-ый такт имелось в виду.
И стоит эта штука немало((
Автор: _Anatoliy Jul 13 2018, 09:30
Парни, а делал ли кто дополнительную фапч для 1PPS? Это с целью уменьшения джиттера этого сигнала? Например из +-25нс сделать +-5нс. Стоит ли овчинка выделки?
Автор: Art55555 Jul 13 2018, 11:20
Ну так в том и задумка ))
Да, я планирую использовать 100- мегагерцовый такт + PPS - сигнал, играться фазой, формировать итоговый, подкрашивать данные, организовывать синхронный старт.
Автор: _Anatoliy Jul 13 2018, 14:52
Да, я планирую использовать 100- мегагерцовый такт + PPS - сигнал, играться фазой, формировать итоговый, подкрашивать данные, организовывать синхронный старт.
Я думаю у Вас всё получится. Было бы время - сам бы занялся этим вопросом.
Лет 10 назад фапчевал сигнал 1PPS с генератором 10МГц - ничего там сложного нет,стабильность была несколько ppb.
Автор: krux Jul 14 2018, 15:00
я подмешивал 1pps от GPS так:
VCOCXO на 10 МГц,
на FPGA мерял сколько тактов от предыдущего пульса 1ппс до следующего.
дальше PID-контроллером (чтоб джиттер/вандер сильно не прыгал) вычислял нужное смещение и ЦАПом давал это смещение на VCOCXO.
зы. поскольку большинство GPS-приемников привязывают 1pps к UTC с точностью +-50нс, то нужно понимать, что можно получить, а что нет.
Автор: _Anatoliy Jul 16 2018, 04:19
Есть сомнения? Не стесняйтесь, поделитесь.
Автор: krux Jul 16 2018, 17:15
всё бы ничего, но есть такая штука как коррекция времени, передаваемого спутником, с земли.
и там в спецификациях, грубо говоря, нормой является один скачок на 50 нс раз в 4 часа.
поэтому "тепличных" условий ждать абсолютно не стоит, и 8ns - это рекламный бред.
Автор: _Anatoliy Jul 17 2018, 04:39
и там в спецификациях, грубо говоря, нормой является один скачок на 50 нс раз в 4 часа.
поэтому "тепличных" условий ждать абсолютно не стоит, и 8ns - это рекламный бред.
Не забывайте что когда говорят о величине джиттера 1PPS то всегда упоминают 1 sigma. На мой взгляд "один скачок на 50 нс раз в 4 часа" эту сигму никак не испортят.
Автор: Art55555 Jul 17 2018, 12:17
VCOCXO на 10 МГц,
на FPGA мерял сколько тактов от предыдущего пульса 1ппс до следующего.
дальше PID-контроллером (чтоб джиттер/вандер сильно не прыгал) вычислял нужное смещение и ЦАПом давал это смещение на VCOCXO.
зы. поскольку большинство GPS-приемников привязывают 1pps к UTC с точностью +-50нс, то нужно понимать, что можно получить, а что нет.
Ну я это упражнение буду проделывать с тактами на 100 МГц. Принцип такой же, да.
Автор: krux Jul 17 2018, 17:51
для подтверждения сей теории нужно иметь свою установку псевдоспутника, ну или накрайняк SDR-передатчик с соответствующими характеристиками.
у меня подобного оборудования нет, поэтому гарантировать устойчивость ФАПЧ/ПИД без подобных исследований я не возьмусь, увольте
Автор: _Anatoliy Jul 19 2018, 14:56
у меня подобного оборудования нет, поэтому гарантировать устойчивость ФАПЧ/ПИД без подобных исследований я не возьмусь, увольте
Ну я тоже ничего имитировать не собираюсь, есть реальный сигнал, вот с ним и нужно работать. А так, Ваша позиция понятна, спасибо.
Автор: Art55555 Sep 12 2018, 14:59
Спасибо за советы.
В итоге выбрал Trimble Condor C1216 в связке с Artix 7.
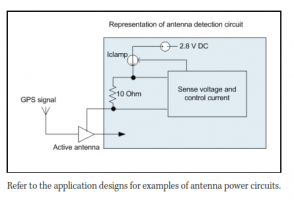
Основная схема подключения простая, но непонятно, как подключать внешнюю активную антенну. Какую лучше выбрать, какое питание к ней подать. В даташите стоит 2,8..
И ещё вопрос. Можно ли PPS-ный сигнал, который идёт в Артикс, принимать на простой IO-пин?
Автор: _Anatoliy Sep 20 2018, 06:36
В итоге выбрал Trimble Condor C1216 в связке с Artix 7.
Основная схема подключения простая, но непонятно, как подключать внешнюю активную антенну. Какую лучше выбрать, какое питание к ней подать. В даташите стоит 2,8..
И ещё вопрос. Можно ли PPS-ный сигнал, который идёт в Артикс, принимать на простой IO-пин?
1). Condor сам формирует питание для антенны,контролирует обрыв и к.з.
2). Посмотрите в каком стандарте формируется сигнал и всё станет ясно.
|
Русская версия Invision Power Board (http://www.invisionboard.com)
© Invision Power Services (http://www.invisionpower.com)