Версия для печати темы
Нажмите сюда для просмотра этой темы в обычном формате
Форум разработчиков электроники ELECTRONIX.ru _ Электрические машины, Электропривод и Управление _ Управление моментным двигателем
Автор: Stepanich Dec 21 2017, 18:50
Здравствуйте.
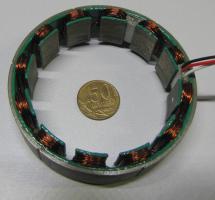
Имеется моментный двигатель (коммутация звезда) http://electronix.ru/redirect.php?http://www.celeramotion.com/sites/default/files/Data_Sheet_Omni_Series.pdf от Celera Motion (в девичестве Applimotion).
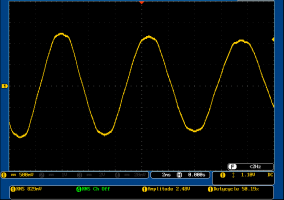
Были сняты осциллограммы линейных напряжений при принудительном вращении ротора (считай, Back EMF):
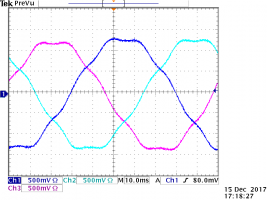
|
и фазных токов при закорачивании всех фаз опять-таки при принудительном вращении ротора (тока 3-й фазы нет, т. к. нет третьего щупа):
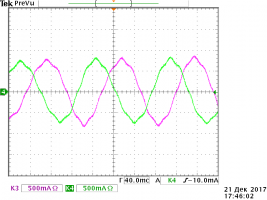
|
Задача (эксперимент): обеспечить плавное перемещение ротора со скоростью примерно 0,1 град./с. Управление разомкнутое (датчик на основе магнитного кольца имеется, но в этом эксперименте не используется), т. е. в первом приближении - как шаговик.
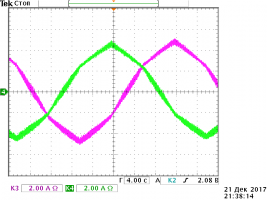
Коммутацией трёх полумостов достигаем такой формы токах в фазах (чтобы повторить форму Back EMF, полученную при эксперименте с принудительным вращением ротора):
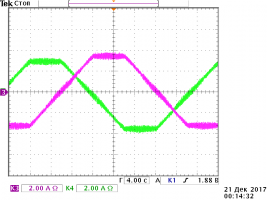
|
или такой (чтобы повторить форму токов, полученную при эксперименте с принудительным вращением ротора):
|
Итог один - зависимость момента от угла поворота: в точке максимума (по модулю) двух токов момент максимален, а в точке пересечения любых двух токов (когда третий максимален по модулю) момент минимален, причём не просто минимален, а практически исчезает (будто двигатель обесточен, хотя ток потребеления от источника при этом почти не уменьшается), что вызывает резкий перескок на следующий полюс, когда соотношение токов немного качнётся дальше; разумеется, всё это повторяется циклично (напомню, вращение очень медленное - 0,1 град./с и меньше). Правильней сказать, что сам эффект есть всегда, только вот он максимален в одном месте, а минимален в другом.
Это похоже на известное явление cogging torque, при котором происходит изменение момента от угла, но этот эффект в худшем случае должен составлять 15%, а не приводить полной потере момента.
Вопрос: как обеспечить сохранение момента (свести к минимуму его флуктуации) на всех углах, т. е. в чём ошибка в создании формы токов в фазах?
Ещё раз отмечу:
- обратная связь сейчас не используется намеренно, т. к. скорость вращения очень мала;
- цель эксперимента не само вращение, а обеспечение сохранности момента на всех углах.
Литературы по управлению электроприводом имеется достаточно (в т. ч. по по векторному), но вся она сводится к вращению двигателя на скоростях с максимальной эффективностью, не решая задачу точного позиционирования и удержания угла.
Спасибо.
Автор: AlexandrY Dec 22 2017, 06:20

Но вы же не точно воспроизводите формы токов.
Скорее всего проблема в слишком грубой модуляции.
Неплохо бы знать и конфигурацию обмоток и магнитов
http://electronix.ru/redirect.php?http://www.bavaria-direct.co.za/info/#prettyPhoto говорит, что не все конфигурации одинаково эффективны для управления звездой
Автор: kopterr Dec 22 2017, 06:55
А как вы создаете управляющие напряжения в обмотки?
В трапециидальном режиме дергание будет, тем более на малых оборотах, хотя у вашего двигателя и 16 полюсов.
Автор: AlexandrY Dec 22 2017, 07:40
В трапециидальном режиме дергание будет, тем более на малых оборотах, хотя у вашего двигателя и 16 полюсов.
Момент создает ток, а не напряжение. Запомните.
Поэтому форма напряжения волновать не должна.
А на осциллограмме по току показана линейная аппроксимация синусоиды.
В обычной электрической модели мотора из 3 полюсов обмотки и 2-х полюсов магнита при обычной 3-х фазной модуляции ситуация с нулевым моментом невозможна.
Тут надо прояснить конструкцию мотора либо искать ошибки в модуляции.
Автор: Stepanich Dec 22 2017, 10:27
Спасибо за ответы.
1. AlexandrY, не соглашусь С Вами насчёт того, что подобное воспроизведение формы токов может быть критично: повторюсь, генерируемая форма токов повторяет форму, снятую при принудительном вращении ротора, не ужели искажения в какие-то проценты могут приводить к полной потере момента в определённых точках. Кроме того, трапецеидальная форма воспроизводимых токов, которая значительно больше отличается от первой, даёт такой же эффект в указанных ранее точках.
Количество пар полюсов, как видно из документации на мотор, восемь; конфигурация обмоток - звезда (последовательное соединение звёзд).
2. kopterr, управляющие напряжения создаём тремя полумостами, но, как правильно заметил AlexandrY, момент создаёт ток, а не напряжение. Мы видим, что ток нужной (предполагаемой) формы, поэтому искать ошибки в модуляции я не вижу смысла. А вот изменение формы токов - возможное решение проблемы, которое я ищу на нашем форуме.
Автор: AlexandrY Dec 22 2017, 10:54
Т.е. 16 полюcов магнита и 12 зубъев?
Сколько зубъев?
Автор: Stepanich Dec 22 2017, 11:37

|

|
Автор: Tanya Dec 22 2017, 13:01
Зачем такие тяжелые картинки? Надо бы сжать.
Автор: AlexandrY Dec 22 2017, 14:08
Притензя не обоснована.
Кому не интересено может не открывать в отдельном окне.
Кто в теме тому разрешение в самый раз.
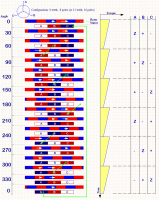
Тогда вы скорее всего ошибаетесь в фазировке подаваемого тока.
Я вот прикинул диаграмму переключения фаз на двигателе.
Для удобства ротор и статор развернул в прямую линию и взял только отрезок на котором помещается 3-и зубца статора

|
Ну не получается для вашей конфигурации ситуации когда момент нулевой.
Такое возможно только если вы перепутали фазировку.
Автор: Tanya Dec 22 2017, 14:56
Кому не интересено может не открывать в отдельном окне.
Кто в теме тому разрешение в самый раз.
То же самое разрешение будет у сжатой. Диски надо жалеть.
|
Автор: Stepanich Dec 22 2017, 16:34
AlexandrY. спасибо за помощь. Решили проделать такой эксперимент: взяли три изолированных источника питания, два из них соединили отрицательными выводами, третий подключили к ним положительным выводом (т. к. наши БП не работают на втекающий ток):

|
Ранее мы установили те механические углы, на которых момент исчезал (или становился пренебрежимо мал). Регулируя ток в каждой фазе, мы пытались обеспечить максимальный момент на вышеуказанных механических углах. Какие бы соотношения мы ни подбирали, потеря момента была точно такой же, как при формировании токов с использованием инвертора.
Автор: AlexandrY Dec 22 2017, 22:11
Так начните сначала с прямоугольного сигнала как на моей диаграмме. Там я подразумевал прямоугольный сигнал.
В таком случае у вас один из 3-х источников всегда должен быть отключен.
Автор: amaora Dec 23 2017, 10:04
Интересно, я бы исходил из того, что если есть ЭДС то должен быть и момент. Но мы похоже говорим про разные моменты. Можно создавать момент задавая поток статора ортогонально потоку ротора, тогда все зависит от ЭДС в этот момент, величины тока, индуктивности. Вы же работаете с мотором как с шаговым и проверяете момент удержания. В этом случае момент удержания будет максимален там где поток ротора (точнее наверно скалярное произведение потоков ротора и статора, или более сложное выражение для момента с учетом индуктивностей по осям) имеет наибольшую зависимость от механического положения ротора, максимум производной по углу. И соответственно с минимумом наоборот. Мне кажется это согласуется с BLDC-подобной формой ЭДС, на участках "плоских полок" вектор потока ротора слабо зависит от его механического положения, поэтому момент удержания мал.
Автор: AlexandrY Dec 23 2017, 10:52
Странный термин - "момент удержания"
Если есть какой-то момент, то это всегда момент вращения.
А "плоские полки" одновременно на трех фазах не бывают, момент вращения можно создать при любой позиции ротора управляя током в фазах.
Иначе безсенсорные BLDC не применялись бы, поскольку не могли бы стартовать при некоторых углах поворота. Но безсенсорные BLDC, как известно, стартуют всегда!
Другое дело что при зафиксированных токах свободный ротор придет в результате в позицию с нулевым моментом.
Автор: amaora Dec 23 2017, 12:19
Момент проявляющийся при отклонение ротора на некую малую величину, или более строго предел отношения, т.е. производная момента по углу отклонения. Все это при заданной фиксированном токе статора.
Проблема, как я вижу, в том, что момент в шаговом режиме создается в области (координата на графике ЭДС, угол) не предназначенной для этого. Нет максимума тока в той обмотке которая имеет максимум ЭДС. Т.е. шаговый режим.
На пальцах не просто это анализировать (с учетом формы ЭДС), сделали бы численную модель с нужной формой ЭДС и проверили в требуемым режиме. Стало бы ясно, достаточно такой ЭДС для этого эффекта или надо копать дальше.
Автор: Stepanich Dec 23 2017, 14:59
AlexandrY, эксперимент с тремя блоками питания не предусматривает подачу сигнала какой-либо формы на обмотки, мы исследуем исключительно статический режим, т. е. подбираем такие токи в фазах, которые позволят создать момент на нужном угле (в том угле, где мы наблюдаем потерю момента при формировании токов с использованием инвертора). Ещё раз отмечу: эксперимент показал, что при любых соотношениях токов в фазах не удаётся достичь момента на определённых углах. При одной комбинации токов мы наблюдаем максимальный момент (тяжело провернуть рукой, ротор всегда возвращается в одно положение) в углах, соседних с интересующим нас; при другой комбинации ротор поворачивается на нужный угол, но момент практически исчезает (ротор можно сдвинуть лёгким прикосновением и он остаётся в этом положении, но при дальнейшем повороте ротора рукой момент растёт с углом поворота, пока не случится перескок одной пары полюсов, после чего эффект повторяется).
Если в цифрах, то области с минимальным и максимальным моментом чередуются каждые 30 электрических градусов (или 8*360/30=96 механических градусов), т. е.:
в 0 эл. град момент максимален;
в 30 эл. град момент минимален;
в 60 эл. град момент максимален и т. д...
Честно говоря, я был готов услышать от практикующих спецов в этой области что-то вроде: ничего удивительного, так и должно быть, эти движки не могут развивать момент абы на каких углах при нулевых скоростях; если хочешь момент, либо держи движок на определённых углах, либо раскрути движок где-нибудь минимум до 0,5 об./с.
Автор: AlexandrY Dec 24 2017, 12:19
Нет, что то у вас не то с макетом.
Вот я яснее нарисовал диаграмму:
|
Из нее сдедует что минимальный момент только в три раза отличается от максимального и не равняется нулю.
Минимумы следуют каждые 60 электрических градусов. Тут вы углы чередования максимумов и минимумов правильно рассчитали.
У вас скорее всего слишком маленький ток и вы не учитываете момент трения. Увеличьте ток и увидите момент.
Скрость тут ни при чем. Это статическая диаграмма, поскольку шкалу времени можете растягивать до бесконечности.
Автор: варп Dec 24 2017, 14:00
Я немного занимался подобными двигателями ( разработал с нуля контроллер для него на основе обычной ПЗУ ...).
Мне кажется методика Ваших исследований ( статический режим ) не совсем корректна... В таких двигателях нет такого относительного положения ротора и статора при котором ротор не смог бы сдвинуться с места ( то есть момент был бы равен нулю ) при ПРАВИЛЬНЫХ напряжениях на фазах. Но за правильной сменой фаз следят датчики Холла, симулировать их работу вручную нереальная задача... А если не менять правильно и в нужный момент напряжения на фазах то и выводов правильных сделать не получится...
Простите, если сказал банальность...
Автор: Stepanich Dec 24 2017, 21:09
AlexandrY, ток (сумму токов) стараемся поддерживать одинаковым (примерно номинал для этого двигателя, т. е. 3 А), чтобы не было разницы в условиях опытов, разумеется. Ток кратковременно увеличивали как раз в надежде увидеть момент: момент увеличивается лишь в тех углах, где он был изначально, а в "проблемных" углах неопределённость остаётся. Если я правильно понял, на Вашей статической диаграмме изображены шесть дискретных значений токов. Перебор подобных комбинаций действительно приводит к получению максимального момента, но на "противоположных" электрических углах. Эти токи соответствуют электрическим углам 0, 60, 120..., а нам надо 30, 90, 150... Таким образом, с предположением о маленьком токе и моменте трения позволю себе не согласиться. Видимо, пришло время устанавливать датчик момента и продемонстрировать здесь данные в табличном виде.
Ещё хотелось бы спросить, откуда берётся соотношение между минимальным и максимальным моментом 1/3? Это явление и есть тот самый cogging torque? Но не должен ли он составлять максимум десятки процентов? А тут получаются сотни.
варп, Вы сами отметили, что мы работаем в статическом режиме, тогда с какой целью "менять правильно и в нужный момент напряжения на фазах", если это приведёт к смещению ротора и изменению угла. Или Вы имеете в виду, что есть такая комбинация переключений напряжений (токов) в фазах, которая позволит удержать ротор в нужных нам углах с максимальным моментом? И каково назначение датчиков Холла, если положение ротора не изменяется?
У этого же производителя есть т. н. http://electronix.ru/redirect.php?http://www.celeramotion.com/sites/default/files/Data_Sheet_Agility_Series.pdf. В http://electronix.ru/redirect.php?http://www.celeramotion.com/sites/default/files/TN-2001_Comparison_of_Slotless_and_Slotted_Motors.pdf они сравнивают их с текущими. Есть ли у кого-нибудь мнение, исправит ли ситуацию их применение?
Автор: AlexandrY Dec 24 2017, 21:42
...
Есть ли у кого-нибудь мнение, исправит ли ситуацию их применение?
Нет, cogging я не учитываю и не могу учесть не проведя реальных измерений.
На моей диграмме показан именно статический момент силы вызванный разницей углов между полями статора и ротора, когда по обмоткам статора течет постоянный ток в определенных направлениях.
Оценка величины момента сделана грубо чисто геометрически как сумма смещений центров полей полюсов статора и ротора на линейной развертке.
В реале, конечно, надо было бы применить синусы углов смещения, но я оцениваю ошибку не более чем в 30%
Т.е. если у вас нет момента силы при каком-то угле, то вы должны одну обмотку обесточить, на второй сохранить величину и направление тока, а на третьей сохранить величину, но поменять направление тока.
Безслотовые движки не помогут пока вы не смогли осуществить правильную коммутацию. Да там и и управление должно быть строго векторным. Холлы не помогут уже.
Автор: Stepanich Dec 25 2017, 16:49
Попробовали составить модель в Sumulink (параметры двигателя: [1.02e-04 1.0e-09 8 0]):
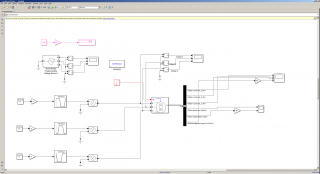
|
Получилась такое соотношение момента (фиолетовый цвет) и токов фазах (синий, жёлтый и красный цвета):
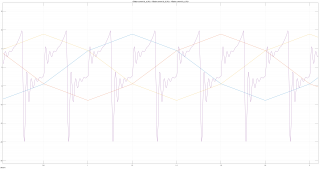
|
Видно, что в точке равенства двух токов момент нулевой.
Автор: варп Dec 25 2017, 17:57
Stepanich, я не знаю, что и где Вы моделируете..., но объясните мне на пальцах:
... в данный момент две катушки ( две фазы, два полюса ...) , катушки полюсов ( допустим А и В ) включены ПОСЛЕДОВАТЕЛЬНО ... Допустим при этом - полюс эл. магнита фазы А ( полюс фазы А - северный ) ТЯНЕТ к себе ближайший магнит РОТОРА ( ПОЛЮС МАГНИТА - ЮГ).... В тоже самое время полюс ФАЗЫ В ( юг - соответственно ) отталкивает от себя ближайший магнит (юг) ротора ... И при чём здесь равенство токов??? Моменты от полюсов направлены в одном направлении...., и таки повернут ротор... По мере поворота ротора сила притяжения полюсов статора и магнитов ротора ( момент ) будет снижаться , так как их расположение станет менее оптимальным, но момент НЕ снизится до нуля, так как вскоре сменятся фазы , и момент вновь станет максимальным...Смотрите картинку из поста #17....
А теперь Вы расскажите на пальцах, что моделируете....
Автор: AlexandrY Dec 25 2017, 19:25
Кто ж спорит!?
Да, если токи в обмотках не менять, то свободный ротор мотора придет в положение с нулевым моментом.
Такие же точки ротор будет проходить если его крутить асинхронно, как в вашей модели.
Странно почему вы так долго топчитесь вокруг такого простого наблюдения.
Уж не тролите ли?

Сегодня получил по почте такую незатейливую статейку про управление моторами содержащую весьма пространный FAQ.
Может поможет - http://electronix.ru/redirect.php?https://drive.google.com/open?id=1iDhL3nt-Nz2rpkVcBowCr8HShe9Jt39r
Автор: Stepanich Dec 26 2017, 18:36
варп, мы обсуждаем статический режим, т. е. режим, при котором токи не изменяются, поэтому фазы "вскоре" не сменятся. Ещё раз напомню проблему: исчезновение момента на определённых углах (каждых 60-ти электрических градусах). Моделируем вот что: подаём трапецеидальные токи в обмотки с низкой частотой и смотрим на момент на валу.
AlexandrY, так я и хотел услышать подобный ответ: у этого двигателя есть углы, получаемые путём формирования неизменных токов в фазах, при которых момент нулевой. И это не стёб. Согласен на перенос моего вопроса в раздел для начинающих.
Автор: AlexandrY Dec 26 2017, 18:50
AlexandrY, так я и хотел услышать подобный ответ: у этого двигателя есть углы, получаемые путём формирования неизменных токов в фазах, при которых момент нулевой. И это не стёб. Согласен на перенос моего вопроса в раздел для начинающих.
Я вижу проблему в том, что вы не описали полностью условия своего эксперимента.
Ротор закреплен или вращаетеся? Чем измеряете момент на валу?
Чем измеряете и стабилизируете токи, можно ли доверять вашим формирователям токов?
В любом случае BLDC предназначены для синхронного управления.
Т.е. либо с датчиками либо без навесных датчиков, но вы точно должны знать положение ротора и уже исходя из него формировать токи.
А при медленном вращении вы еще более прецизионно должны знать положение ротора.
Это же и к безслотовым движкам относится, просто они будут точнее работать с векторным регулированием.
Кстати, из FAQ-а из предыдущей ссылки можно сделать вывод, что стабилизировать момент можно и на двигателях с трапецеидальной ЭДС, только это будет не векторное управление, а гораздо более сложное.
Автор: Stepanich Dec 26 2017, 20:27
AlexandrY:
1. Вращению ротора ничто не препятствует, но мы работаем именно на статике. Вращение ротора было упомянуто лишь для того, чтобы акцентировать внимание на зависимости момента от угла.
2. Момент измеряем динамометрическим ключом (англ.: reaction torque sensor). Планируем заменить на динамический датчик для автоматизации измерений.
Так всё-таки, Ваша фраза "Т.е. либо с датчиками либо без навесных датчиков, но вы точно должны знать положение ротора и уже исходя из него формировать токи" означает, что для одного и того же НЕИЗМЕННОГО угла мы должны ИЗМЕНЯТЬ токи в фазах (пусть даже по очень хитрому закону) или нет? Ещё проще: фиксированный угол + номинальный момент == стабильные токи в фазах или нет? Если нужно использовать какой-то хитрый закон, то какой: динамическую смену направления поля (с частотой выше той, которую может отработать ротор из-за инерционности), чтобы ротор, увлекаясь полем туда-сюда, держал нужный угол с моментом?
Что может быть сложнее (продвинутей) векторного управления? Если Вы имеете в виду flux weakening и т. п., то пока отложим этот вопрос.
Автор: варп Dec 27 2017, 04:23
Stepanich, ещё не понятно...., поясните -
... Всего возможны ШЕСТЬ комбинаций сигналов с датчиков Холла...
Так же очевидно, в пределах ОДНОЙ КОМБИНАЦИИ (60-ти магнитных градусов) возможно смещение ротора и изменение МОМЕНТА в пределах (допустим) от максимума, до 1/3 максимума...
Тогда вопрос - Вы в состоянии контролировать положение ротора в пределах ОДНОЙ комбинации датчиков Холла ( 60-ти магнитных градусов )? Без этого контроля НЕВОЗМОЖНО организовать адекватное управление (током) моментом в ПРИНЦИПЕ....
То есть, если знать положение ротора с точностью до градуса, и точно знать ( просто из таблицы ) каков момент (речь о коэффициенте ,конечно) при каком-то ( не важно каком ) фиксированном токе (и при текущем градусе), то теоретически не сложно организовать такое управление током, при котором момент будет одинаковым при любом положении ротора..., ДАЖЕ В СТАТИКЕ...
Автор: AlexandrY Dec 27 2017, 08:04
Что может быть сложнее (продвинутей) векторного управления? Если Вы имеете в виду flux weakening и т. п., то пока отложим этот вопрос.
Стабильные постоянные токи = постоянный момент при любом угле поворота в статическом состоянии. Так гласит закон Ампера.
Но управление моментом, т.е. увеличение, уменьшение, изменение по траектории - это другая тема.
Управление изменением момента по траектории в моторе с неидеально синусоидальной ЭДС - сложная задача в плане повышенных требований к закону управления. PID-ом, как в векторном управлении, здесь не отделаться.
Хотя можно пытаться, если допустимая ошибка выдержки момента более 10%
Автор: amaora Dec 27 2017, 12:45
Stepanich
1. Ток который подаете на обмотки синхронизирован с положением ротора?
2. Датчики положения не используются?
3. Если нагрузки нет, ротор следует за полем статора, о каком моменте тогда речь (двигатель всегда в области ~0 момента), уточните.
4. Если нагрузка есть, допустим ротор зафиксирован и вы измеряете момент двигателя, тогда ток надо задавать в соответствии с положением ротора (пусть он и неподвижен), иначе некорректное управление двигателем, и момента от него ждать не надо.
Автор: Stepanich Dec 27 2017, 13:14
варп, как я указывал ранее, у нас имеется магнитный датчик положения, дающий точность 0,02 градуса. В данном эксперименте он намеренно не используется, т. к. мы пытаемся понять "электрофизику". Если на нашем форуме мне говорят что-то вроде: "не майтесь дурью, у этих движков в этих углах при неизменных токах будет нулевой момент; замыкайте контур управления - только так и никак иначе вы получите момент на нужном статическом угле" - мы перестаём маяться дурью и переходим к замкнутой системе...
AlexandrY, ну не получается у нас по Амперу, к сожалению.
Кто-нибудь из неравнодушных может ради интереса проделать эксперимент с тремя блоками питания на похожем движке?
Автор: AlexandrY Dec 27 2017, 13:37
Самый похожий который у меня есть -

|
12 зубцов
16 полюсов
Обратная ЭДС такая -
|
Подойдет?
Правда он outrunner. Немного другое распределение полей.
Автор: Stepanich Dec 27 2017, 15:34
AlexandrY, спасибо за отклик.
Думаю, подойдёт. Вы чувствуете "шаги" при вращением пальцем?
Методика примитивна:
1. Токами выставляете ротор в электрический угол 0 градусов.
2. Оцениваете момент (динамометрическим ключом, если нет - просто пальцами).
3. Токами (сумма такая же, как в п. 1) выставляете ротор в электрический угол 30 градусов.
4. Повторяете п. 2.
Спасибо!
Автор: amaora Dec 27 2017, 19:55
Попробовал на модели BLDC, вот от http://electronix.ru/redirect.php?http://www.iaeng.org/publication/WCE2011/WCE2011_pp1504-1508.pdf. Задаю постоянный ток, несколько вариантов, вектор направлен на 0 либо на 30 электрических градусов. Нагрузки сначала нет, затем подаю колебания (ступенчатое изменение нагрузки, несколько раз с разным знаком) которые отклоняют ротор на некоторых угол, по величине отклонения оцениваю момент, меньше или больше. Так вот если ЭДС синусоидальная, то от угла амплитуда до которой раскачивается ротор не зависит, а если подмешать нечетные гармоники (приблизив форму к BLDC) то на 30 градусах ротор раскачивается больше, то есть "момент удержания" меньше. Если будет еще время, задам идеальную трапециевидную ЭДС, или скопирую из графика в начале темы. Но для меня уже ясно, что достаточно той формы ЭДС, для того чтобы получилось описанное ТС-ом. Ведь ничего более сложного модель не учитывает, а эффект проявляется.
blm_BEMF_Shape(double x)
{
double s1;
/* Almost sinusoidal shape.
* */
s1 = - (sin(x) + sin(x * 5.) * 0.2);
return s1;
}
На графиках электрический угол, для 0 и 30 градусов направления вектора тока.
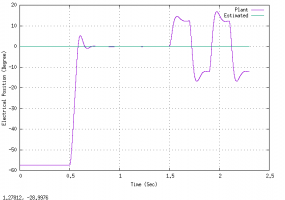
|
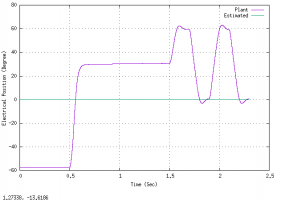
|
Автор: Stepanich Dec 27 2017, 20:26
amaora, спасибо за участие.
Хочу уточнить:
1. 0 электрических градусов - это: Ia = sin(0) = 0; Ib = sin(0+120) = 1.86; Ic = sin(0+240) = 0.14?
2. 30 электрических градусов - это: Ia = sin(30) = 0.5; Ib = sin(30+120) = 0.5; Ic = sin(0+240) = -1?
В таком случае наши результаты расходятся: T@0ed = max; T@30ed = min, не смотря на формирование токов по синусоидальному закону.
Не заметил Вашего сообщения #29:
1. Ток который подаете на обмотки синхронизирован с положением ротора?
Нет, система разомкнута (как было упомянуто в первом сообщении).
2. Датчики положения не используются?
Нет, не используются (в данном эксперименте, как было упомянуто в первом сообщении).
3. Если нагрузки нет, ротор следует за полем статора, о каком моменте тогда речь (двигатель всегда в области ~0 момента), уточните.
Нагрузка создаётся динамометрическим ключом (или рукой для беглой оценки).
4. Если нагрузка есть, допустим ротор зафиксирован и вы измеряете момент двигателя, тогда ток надо задавать в соответствии с положением ротора (пусть он и неподвижен), иначе некорректное управление двигателем, и момента от него ждать не надо.
Это тот самый ответ, который я ждал. Иными словами: у данного двигателя момент будет минимален каждые 60 электрических градусов, если не обеспечить замкнутое управление.
Кстати, интересное видео:
http://electronix.ru/redirect.php?https://www.youtube.com/watch?v=bBEVJfnmxG8
Автор: amaora Dec 28 2017, 14:57
Нет, то что вы измеряете при разомкнутом управлении слабо связано со способностью двигателя обеспечить момент во всех положениях ротора. Посмотрите еще раз на форму ЭДС. В любой точке одна из фаз имеет плато. Провал момента мог быть если бы в некоторых точках по всем фазам наблюдалась низкая ЭДС.
Cogging torque это другое, он проявляится и без тока в обмотках.
Автор: Stepanich Dec 28 2017, 15:48
amaora, в предыдущем посте я пропустил важную частицу НЕ; должно было быть так: у данного двигателя момент будет минимален каждые 60 электрических градусов, если НЕ обеспечить замкнутое управление.
Автор: Tanya Dec 29 2017, 09:49
Вот случайно заглянула к вам... Странные вещи... Что тут моделировать...
При постоянных токах в обмотках момент как функция угла обязательно будет кое-где равен точно нулю, так как средний момент равен нулю, а эта функция непрерывна. Простая такая математика.
Автор: AlexandrY Dec 29 2017, 10:01
При постоянных токах в обмотках момент как функция угла обязательно будет кое-где равен точно нулю, так как средний момент равен нулю, а эта функция непрерывна. Простая такая математика.
Нет, все гораздо серьезней.
Мы тут конечно путаемся в определениях, терминах и проч. ,
но главную мысль я понял так - есть позиции ротора где какую бы комбинацию токов вы не применили вы не получите сколько нибудь значительного момента преодолевающего трение.
Это противоречит, конечно, самой идее синхронного мотора, но кто его знает эти заморочки с моторами.
Может ноу-хау какое, и разработчики рассчитывают на запуск в асинхронном режиме на самоиндукции.
Может у них cogging настолько сильный.
А может просто брак типа неправильного намагничивания.
Такое нам китайцы доставляли.
Или может у автора конструкция специфичная.
Я сейчас как раз делаю стенд для исследованя когинга.
Автор: варп Dec 29 2017, 10:23
Tanya, скажите Ваше мнение - момент в коллекторном двигателе может быть равным нулю при каком-то положении ротора?
Автор: Tanya Dec 29 2017, 10:37
Нет, а почему Вы спрашиваете?
Да уж, не верится.
Автор: варп Dec 29 2017, 11:15
Tanya, спрашиваю потому, что идёт какая-то бесконечная путаница в понятиях.... Вот смотрите...
То есть, момент, вроде как где то будет равен НУЛЮ ...
я переспросил -
...Tanya, скажите Ваше мнение - момент в коллекторном двигателе может быть равным нулю про каком-то положении ротора?...
Вы ответили -
Вот я и пытаюсь дать понять, что коллекторный и BLDC двигатели по сути одинаковы... То есть - момент в них не может быть равен нулю...
В коллекторном двигателе подключение нужных обмоток при вращении ротора происходит АВТОМАТИЧЕСКИ (щётками по ламелям коллектора) , а в BLDC нужные обмотки подключаются ВНЕШНИМИ силовыми ключами определённым образом ориентируясь на сигналы с датчиков Холла, которые отслеживают положение ротора... Но оба двигателя, что коллекторный, что BLDC - способны "тянуть" с нулевых оборотов..., независимо от положения ротора... Да, момент может больше, или меньше, смотря на положение ротора... , но момент будет ВСЕГДА...
Автор: Tanya Dec 29 2017, 11:32
Читайте внимательно, что было написано. Там было про BLDC с фиксированными токами в обмотках.
В коллекторном двигателе посредством коллектора ток меняется.
Автор: варп Dec 29 2017, 11:37
... а что, если вал коллекторного двигателя ЗАКЛИНИТЬ (не дать ему вращаться ), момент у него исчезнет??? Ни куда момент не денется...
------------
... а обсуждать BLDC с фиксированными токами в обмотках, да ещё без контроля положения ротора - просто бред...
BLDC двигателем ВСЕГДА нужно управлять.... Тогда и момент всегда будет...
Не надо "лошади отрывать ноги, а потом спрашивать - почему она не бегает..."
Автор: Tanya Dec 29 2017, 11:46
Так не участвуйте в этом.
Этот двигатель - шаговый с малым числом полюсов. Нет?
Автор: варп Dec 29 2017, 13:10
Нет..., НЕ шаговый ВООБЩЕ.... И полюсов может быть 36 и больше...

|
Автор: AlexandrY Dec 29 2017, 13:16
У шаговых нет когинга. Это принципиально.
С когингом вы не угадается где ротор остановится.
Автор: Tanya Dec 29 2017, 14:32
С когингом вы не угадается где ротор остановится.
Но ведь момент меняет знак и непрерывный? И интеграл от момента по полному углу нулевой?
Автор: Stepanich Dec 29 2017, 15:38
AlexandrY, Вы абсолютно правильно поняли главную мысль: есть позиции ротора, где какую бы комбинацию токов мы ни применили, мы не получаем сколько нибудь значительного момента, преодолевающего трение.
варп, спасибо за аналогию с лошадью - это очень яркая параллель.
Так как мнения разошлись, и есть предположение об особенности конструкции, будем искать ещё один подобный двигатель для проведения подобных экспериментов.
Автор: AlexandrY Dec 29 2017, 17:41
Если вы о сферичеком моторе в вакууме, то я с вами полностью согласен.
Автор: quarz Dec 29 2017, 22:25
С когингом вы не угадается где ротор остановится.
Не согласен. У ШД есть зубцовый момент и он чувствуется при незапитанных обмотках
Автор: Herz Dec 29 2017, 22:48
варп, Вы - практикующий психиатр? Делаю Вам замечание за нарушение п.п. 2.1а,б Правил.
Автор: варп Dec 30 2017, 03:00
Stepanich, я надеюсь, что Вы на меня не в обиде... Поверьте - совсем не было цели Вас обидеть...- просто мне кажется, что Вы порой идёте немного "не в ту сторону"... И я, кажется, догадываюсь почему - у вас НЕТ готового контроллера для BLDC..., вот Вы и ищите "под фонарём"...
...BLDC найти сейчас совсем не сложно - в любом самом дешёвом ГИРОСКУТЕРЕ их целых два...., вполне приличного качества, мощностью 350 Вт. Так же легко за 10-20 УЕ найти контроллер для мотор-колеса.. Помучайте BLDC в штатной комплектации - быстрее доберётесь до истины...
... Кстати - про гироскутер - обратите внимание на видео - гироскутер НЕ двигается находясь на подъёме ( спуске ) ... То есть момент ЕСТЬ, а вращения колёс - НЕТ.... Ну и какая там форма тока в СТАТИКЕ ???? - да никакая... - просто постоянный ток прёт через подключенные в данный момент фазы, и всё...
http://electronix.ru/redirect.php?https://www.youtube.com/watch?v=vvvBda5CMQw
Удачи.
------
Чтобы не раздражать модераторов, больше не буду встревать в тему...
Автор: Herz Dec 30 2017, 18:25
А "встревать" прилично не получается, что ли? Раздражает не "встревание", а грубость и оскорбительные высказывания.
Автор: Stepanich Dec 30 2017, 22:11
варп, всё нормально. Думаю, что если в моторах гироскутеров есть похожая проблема, то она просто не заметна (разве страшен откат на пару сантиметров?): в режиме удержания дают 0 (60, 120, 180...) электрических градусов,
Автор: варп Dec 31 2017, 04:09
Stepanich, вот как я себе это представляю ( но именно про пульсации момента раньше не думал и это надо проверять)...
... сразу после очередного переключения фаз, момент МАКСИМАЛЬНЫЙ..., так как вектор момента направлен ПО КАСАТЕЛЬНОЙ к ротору... Далее, по мере вращения ротора, вектор сил магнитного притяжения зубцов статора и магнитов ротора всё более поворачивается к центру ротора..., в итоге, вращательный момент УМЕНЬШАЕТСЯ... , но уменьшиться до нуля вращательный момент (то есть - ротор "залипнуть" ) НЕ МОЖЕТ, так как вскоре произойдёт смена фаз ( ведь поле статора должно опережать поле ротора...) и вращательный момент вновь станет максимальным...
Вывод - ротор МОЖНО зафиксировать на ЛЮБОМ ГРАДУСЕ ( ПРИ ДАННОЙ НАГРУЗКЕ НА ВАЛ ), но затраты энергии на удержание ротора будут тем больше, чем ближе ротор находится к точке смены фаз....( в диапазоне углов 0-60, 60-120...)
----------
Сам график изменения момента AlexandrY привёл ещё в посте#17.
Автор: Burner Jan 8 2018, 00:55
В орщем, автор захотел поиметь равномерно движущийся угол фиксации ротора.
"обеспечить плавное перемещение ротора со скоростью примерно 0,1 град./с" Это считай статика, а не динамика(ибо инерция здесь уже не играет) - удержание ротора в фиксированном положении, просто положение это потихоньку должно ехать. Сталбыть, для конкретного движка возникает вопрос 1 - можно ли поиметь одинаковую "жесткость"(тот самый градиент, НМ/град) на всех 360 град? Скорее всего да, имхо. Просто если там есть глубокие "провалы", в них придется вкачивать тока сильно больше среднего, чтобы заполнить.
Вопрос 2 - какие токи в фазы нужно давать в зависимости от угла, чтобы этого добиться? Отвечаю со всей ответственностью: А хрен его знает.
Это зависит от формы полюсов и намотки обмоток.
Как просто определить этот закон изменения - тоже открытый вопрос.
Если теоретизировать - момент дает изменение интеграла магнитного потока, умноженного на напряженность поля в зазоре, на каждый градус отклонения ротора. А напряжение с фаз(если крутишь ротор) показывает только поток, безотносительно к напряженности поля.
По идее, дело как раз в градиенте энергии на градус.
! Вы вот чего.. Попробуйте посмотреть напряжение(оно же - ток) на оптимально нагруженных фазах(т. е. сопротивление подбираешь приблизительно так, чтобы получить максю мощность при тех же оборотах. Сильно точно, наверно, не надо - зато фазы нужно грузить все три.).
Причем желательно крутить с маховиком, чтобы ротор крутился плавно.
Быстрое вращение, как понимаете, тоже не нужно. Поэтому маховик желателен помассивнее.
Забыл - наверное, при оценке мощности в резисторах нужно учитывать(добавлять) и мощность в обмотках.
Вот эта вот форма тока Вам скорее всего и будет нужна.
Автор: AlexandrY Jan 8 2018, 08:35
Началась борьба телепатов.
Откуда вам знать какая там инерция? Фотки всей конструкции целиком не было.
Инерция определяется нагрузкой. Нагрузка в добавок может быть нелинейной. Представте себе многозвенное сочленение у робота.
Там момент инерции на первом приводе будет очень сложной функцией от положения всех последующих звеньев.
Тем более что уже несколько раз намекали на коггинг.
Еще на малых скоростях резко вырастает нелинейность трения. Особенно в приводах с редукторами. Начинает проявляться кулоновское трение и вариабельная по времени адгезия.
Тут и обсервер Люенбергера не поможет для качественного управления.
Автор: Impartial Jan 9 2018, 15:38
"обеспечить плавное перемещение ротора со скоростью примерно 0,1 град./с"
Возможно и в сто раз меньше. Сервосистемы с синхронными двигателями некоторых производителей это доказывают.
Недавно сам проверял и получилось в четыре раза медленнее чем земля крутится.
Правда там на двигателе стоят абсолютные знкодеры (резольверы) с разрешением 65536.
На первый взгляд неравномерность вращения не превышает 10%. (лазерная указка установлена на валу двигателя и измерения проводились на дистанции 60м.)
Автор: quarz Jan 9 2018, 15:55
Возможно и в сто раз меньше. Сервосистемы с синхронными двигателями некоторых производителей это доказывают.
Недавно сам проверял и получилось в четыре раза медленнее чем земля крутится.
Правда там на двигателе стоят абсолютные знкодеры (резольверы) с разрешением 65536.
На первый взгляд неравномерность вращения не превышает 10%. (лазерная указка установлена на валу двигателя и измерения проводились на дистанции 60м.)
Если не секрет, что это был за мотор и контроллер?
Автор: Impartial Jan 9 2018, 16:19
Модератор забанит за рекламу.
Автор: quarz Jan 9 2018, 17:47
Обмен опытом - не реклама. Но я понял, секретно так секретно =)
Автор: Vasily_ Jan 9 2018, 21:09
Если по делу, то это не реклама.
Автор: Stepanich Jan 9 2018, 21:56
Благодарю за ответы.
варп: если следовать вашей фразе "но затраты энергии на удержание ротора будут тем больше, чем ближе ротор находится к точке смены фаз", а также диаграмме из сообщения 17, то момент должен отличаться примерно в три раза? Если так, то на нашем моторе это подтвердить не получается: в указанных ранее углах момент падает более чем в три раза (цифру привести не могу - не достаточно чувствительности динамометрического ключа).
Burner, формы напряжений/токов я приводил в первом сообщении. Кроме того, проводился эксперимент с независимыми источниками (см. сообщение 11).
AlexandrY, нагрузка не имеет нелинейных элементов: работаем с примитивным стендом прямого привода:

|
Автор: KatKat Jan 11 2018, 10:49
|
|
или такой (чтобы повторить форму токов, полученную при эксперименте с принудительным вращением ротора):
|
|
При малой частоте 3-х фазной системы токов (1-3 Гц) и "приличном" моменте (0,5-1 Нм) ротор двигателя (без присоединенной нагрузки) обязан "втянуться" в синхронизм за полем статора.
Из графиков не понятно какова амплитуда тока в фазах и каков при этом расчетный момент двигателя Кi*I. Какова частота тока ? как будто бы очень мала - период что-то около 36 с ???
Может просто не заметно, что он вращается ???

Автор: Burner May 20 2018, 22:12
Полгода прошло, ТС, наверно, все уже решил  . Напр., бросить эту грязную работу..
. Напр., бросить эту грязную работу..
В нормальном движке макс. доступный момент в любом положении должен быть не ниже какого-нить вменяемого процента от номинального. Процентвв 80-90 там..
Это должно означать либо бракованный движок, либо действительо перепутанную фазрровку. Адназначна(С).
Думаю, в ЛЮБОМ положении ротора найдется фаза, ток в которой в одной создаст момент мин. 50 номинального. И скорее всего другая фаза, которая с током в правильном направлении добавит еще процентов до 50. Примерно так.
В 1 сообщении -
Значит, должно плавно вращаться положение равновесия, и желательна максимальная крутизна зависимости момента от поворота ротора с этого положения. Типа чтобы по возможности эта ваша часовая стрелка удерживалась на положенном месте. Кстати настолько медленно не обязательно. Достаточно, чтобы время было сильно больше постоянной времени L/R. При ваших размерах - пара герц норм.
Сложность в том, чтобы работать с неизвестной формой поля и влиянием полюсных наконечников.
Я немного подумал - похоже, форма тока в фазах должна быть как интеграл из Back EMF(1 картинка в 1 посте).
Т. е. берешь Back EMF фазы, пропускаешь через интегратор, и записываешь. Или записываешь, потом интегрируешь.
В общем, это было прикольно
Русская версия Invision Power Board (http://www.invisionboard.com)
© Invision Power Services (http://www.invisionpower.com)