| |
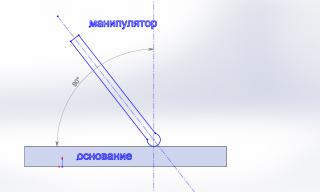
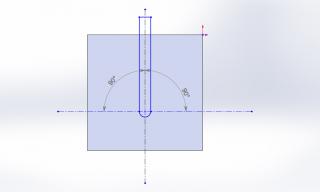
 Определение положения манипулятора Определение положения манипулятора |
|
|
|
|
 Mar 15 2017, 08:15 Mar 15 2017, 08:15
|
Участник

Группа: Участник
Сообщений: 15
Регистрация: 14-08-12
Пользователь №: 73 117

|
Цитата(Arthur_Sh @ Mar 15 2017, 15:02)  нет, основание жестко фиксировано.
Акселерометром я определяю угол по вертикали, тут вопросов нет. А как горизонталь считать? Компас? Один датчик на основание, второй на манипулятор
|
|
|
|
|
|
|
|
Mar 15 2017, 09:39
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(_pv @ Mar 15 2017, 11:16) 2AlexandrY: какую точность с этими тексасовскими индуктивными преобразователями получили в такой геометрии? Так нечем точность проверить, нет такой механики у меня. Но разрешение лучше 0.05 град Цитата(Arthur_Sh @ Mar 15 2017, 11:28) я не указал, манипулятор управляется двумя актуаторами. Ну вот, значит есть две оси. Можно вешать любые угловые датчики. Другое дело, что у механики всегда есть упругая деформация и при таких требованиях к точности она уже будет сильно влиять.
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|