| |
 Как правильно измерять индуктивность соленоида? Как правильно измерять индуктивность соленоида? |
|
|
|
|
 Sep 7 2017, 04:58 Sep 7 2017, 04:58
|

Ally

Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050

|
Цитата(Егоров @ Sep 7 2017, 01:29)  Хм... насколько помню из курса электромагнитных устройств индуктивность в конструировании соленоидов практически не участвует. Там основное - геометрия магнитопровода и ампервитки. Индуктивность берется во внимание только для схемы управления и влияет на скорость работы, но не на тяговое усилие. Целью является построение функции индуктивности от смещения якоря. Все источники утверждают, что сила прямо пропорциональна градиенту индуктивности и квадрату тока. Ток как измерить понятно. Но как измерить эту функцию индуктивности? Непосредственно силу измерить не могу, нет удобного доступа к якорю.
|
|
|
|
|
|
|
|
Sep 7 2017, 09:37
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
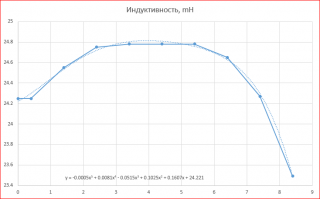
Измерил RLC метром функцию индуктивности от смещения якоря и получил такой феномен:
По нижней оси отложено смещение якоря в мм. Ноль означает что якорь полностью втянут и уперся в коническое углубление
Получается что индуктивность снижается по направлению к нулевой позиции после прохода некоего максимума. Но должна строго увеличиваться исходя из ощущений силы притяжения. Как это может быть? Цитата(_pv @ Sep 7 2017, 12:02) вы похоже ничего не поняли из того что там написано. Там понимать особо ничего не надо. Человек нарисовал индуктивность без сопротивления и нелинейности. Это уже грубое искажение действительности.
|
|
|
|
|
|
|
|
Sep 7 2017, 10:43
|
Гуру
Группа: Свой
Сообщений: 2 563
Регистрация: 8-04-05
Из: Nsk
Пользователь №: 3 954
|
Цитата(AlexandrY @ Sep 7 2017, 16:37) Измерил RLC метром функцию индуктивности от смещения якоря и получил такой феномен:
Получается что индуктивность снижается по направлению к нулевой позиции после прохода некоего максимума. вы рабочую частоту задерите ещё больше при измерении индуктивности с цельным магнитомягким сердечником, и не такие картинки получите. Цитата(AlexandrY @ Sep 7 2017, 16:37) Но должна строго увеличиваться исходя из ощущений силы притяжения.
Как это может быть? вот же мистика, ведь если бы сердечник не упёрся, а втянулся полностью до середины катушки, то при максимальной индуктивности (которая по вашим измерениям, правда, оказалась совсем не максимальная) сила станет равна нулю. может быть индуктивность катушки это вовсе не единица измерения силы с которой в неё должен втягиваться сердечник, а может и вовсе даже не пропорциональна ей. Цитата(AlexandrY @ Sep 7 2017, 16:37) Там понимать особо ничего не надо. а вы похоже ничего и не поняли из того что там написано.
|
|
|
|
|
|
|
|
Sep 7 2017, 11:05
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(_pv @ Sep 7 2017, 13:43) вы рабочую частоту задерите ещё больше при измерении индуктивности с цельным магнитомягким сердечником, и не такие картинки получите.
может быть индуктивность катушки это вовсе не единица измерения силы с которой в неё должен втягиваться сердечник, а может и вовсе даже не пропорциональна ей. Я знаю про потери на перемагничивание, про скин эффект и проч. Просто чтобы вам стала понятна слабость вашей логики представьте бесконечно длинную катушку. Куда в ней будет двигаться сердечник? В центре конечного соленоида производная индуктивности (ну градиент я ее назвал вначале) в обе стороны от центра максимальна и противоположна по знаку, поэтому сердечник будет жестко стремится к центру. То что в центре производная будет иметь острый пик, а не плавный перегиб можно объяснить тем, что зависимость по природе экпоненциальна. А экспоненциальность ее вытекает из того, что сколь бы не был далеко сердечник от катушки он всегда будет влиять на ее индуктивность. Так что ваша интуиция вас подводит. Пока мой вывод таков, что индуктивность на импульс кардинально отличается от индуктивности на синусоиду. Т.е. RLC метрами нельзя измерить индуктивность применяющуюся при расчетах магнитодвижущей силы.
|
|
|
|
|
|
|
|
Sep 7 2017, 11:51
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
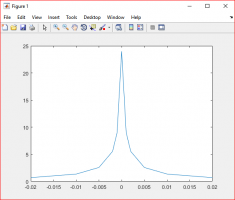
Цитата(_pv @ Sep 7 2017, 14:11) ну то есть в самом центре с максимальной индуктивностью и одновременно с максимальной её производной (но как???) будет и максимальная сила?
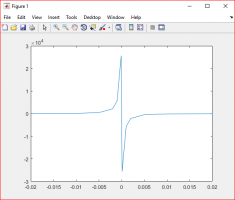
куда она направлена? Вот так выглядит индуктивность соленоидов как функция от смещения якоря в штатных демках Matlab Это полый соленоид со свободным ходом якоря в любую сторону
А так ее производная
Куда направлена сила наверно догадаетесь.
|
|
|
|
|
|
|
|
Sep 8 2017, 10:32
|
Гуру
Группа: Модераторы
Сообщений: 3 868
Регистрация: 15-03-13
Пользователь №: 76 048
|
Тут, похоже, важно выбрать что-то одно:
1. конструируем электромагнит
2. пишем трактат "о некоторых мистических эффектах первой производной индуктивности бесконечно длинной катушки нулевого диаметра".
Если это соленоид "клац-клац", т.е работающий от упора до упора, то возьмите какой-нибудь букварь по расчету соленоидов и нарисуйте среднего качества механизм, если нет готового.
Если же это соленоид с пропорциональным управлению положением якоря, то возьмите букварь по линейным двигателям и сконструируйте таковой.. Во всяком случае, управлять по значению индуктивности на практике не получится, нужен будет датчик линейного перемещения.
Обычно при управлении электромагнитами индуктивность обмотки создает проблемы только при выключении, нужно куда-то отвести энергию, запасенную в обмотке. Во всех других аспектах ее значение никого не волнует. Там только ампервитки в механике участвуют. Ну, конечно же и материалы и геометрия магнитной системы.
Может вы сосредоточилсь на несущественном, не ту задачу перед собой поставили? Или неполно ее тут изложили?
|
|
|
|
|
|
|
|
Sep 8 2017, 11:09
|
Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(Егоров @ Sep 8 2017, 13:32) Может вы сосредоточилсь на несущественном, не ту задачу перед собой поставили? Или неполно ее тут изложили? Да я делаю такую небольшую инновацию. Поскольку процессоры стали мощнее, а IMU сенсоры стали дешевле, то можно позволить себе применить методы расчета пространственной ориентации для определения положения якоря. Т.е. угол поворота рычага якорем я уже могу определять по всем трем осям с точностью 0.05 град Теперь чтобы из любого соленоида сделать линейный актуатор осталось совсем немного. Насчет сущности ампер-витки, то при рассмотрении она распадается на два компонента: ток (амперы) и витки (учтены в индуктивности) Током мы управляем, а витки - константа. Незачем их произведение в анализе представлять одним параметром.
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|