| |
 Максимальная частота сервоконтроллера Максимальная частота сервоконтроллера |
|
|
|
|
 Feb 27 2009, 20:16 Feb 27 2009, 20:16
|
Частый гость

Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455

|
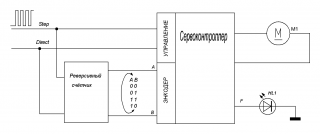
Как определить максимальную частоту импульсов на входе сервоконтроллера при позиционировании? Хочу попробовать собрать подобный стенд (см. рис.). Допустим я буду «подавать» постепенно увеличивая частоту на Step. Как определить момент начала пропуска входных импульсов? Я предполагаю, что измеряя сигнал на двигателе (ШИМ) в момент когда ширина импульса будет максимальной (максимальные обороты) – это и будет той самой «точкой максимума». Или в подпрограмме обработки прерывания от Step «выдавать» сигнал (на светодиод) и измерять частоту до её прекращения роста? Как вообще это измеряют? Нет ли специальной программы, которая «выдаёт» на LPT порт сигналы Step/Dir, A, B?
Эскизы прикрепленных изображений
|
|
|
|
|
|
|
|
Feb 27 2009, 20:30
|

чукчхэшаражогрмонтажник
Группа: Участник
Сообщений: 1 852
Регистрация: 13-07-07
Из: Minsk
Пользователь №: 29 094
|
Цитата(arisov @ Feb 27 2009, 23:16)  Как определить максимальную частоту импульсов на входе сервоконтроллера при позиционировании?
... Нужно сначала определиться с терминологией. Сервоконтроллер это управляющее устройство с обратной связью от объекта управления. Имеет смысл говорить о времени реакции на управляющее воздействие. Применительно к шаговому приводу понятие сервоконтроллер не используют, хотелось бы знать, какой у вас двигатель, а также по какому параметру (скорость, положение) осуществляется ОС.
Сообщение отредактировал evgeny_ch - Feb 27 2009, 20:33
--------------------
Quo vadis?
|
|
|
|
|
|
|
|
Feb 27 2009, 20:51
|
;
Группа: Участник
Сообщений: 5 646
Регистрация: 1-08-07
Пользователь №: 29 509
|
Цитата(arisov @ Feb 27 2009, 23:16) Как определить максимальную частоту импульсов на входе сервоконтроллера при позиционировании? == максимальная частота обновления командного регистра положения, а на это, в свою очередь, управляющим алгоритмом накладываются ограничения по скорости и току. Это когда обновление идет быстрее периода сервоцикла. Такшта, есть опасения, что Вы померяете нечто вроде погоды на Сатурне  Цитата(arisov @ Feb 27 2009, 23:16)
Нет ли специальной программы, которая «выдаёт» на LPT порт сигналы Step/Dir, A, B? Программу и написАть недолго. Если она окажется полезной. Что она должна делать, как Вы считаете - как свип-генератор или просто задание скорости?
|
|
|
|
|
|
|
|
Feb 27 2009, 21:18
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(evgeny_ch @ Feb 27 2009, 23:30) Нужно сначала определиться с терминологией.
Сервоконтроллер это управляющее устройство с обратной связью от объекта управления.
Имеет смысл говорить о времени реакции на управляющее воздействие.
Применительно к шаговому приводу понятие сервоконтроллер не используют,
хотелось бы знать, какой у вас двигатель, а также по какому параметру (скорость, положение)
осуществляется ОС. Может не правильно нарисовал, но у меня сервоконтроллер, а не шаговый привод. На рисунке предполагаемого стенда я вместо сигналов с энкодера связанного с двигателем «подаю» от отдельного реверсивного счётчика. У Gecko ServoDrive G320 этот параметр Step Pulse Frequency = 0 – 250 kHz, у UHU ServoController этот параметр Speed = up to 250 000 steps/s (хотя реально на форумах пишут, что около 130кГц). Мне скорее всего надо знать максимальную частоту которую может «захватить» сервоконтроллер (микроконтроллер) обрабатывая 2 прерывания - по Step и энкодера. Чтобы гарантированно знать, что ни один импульс не пропадёт, все запомнятся (в счетчиках заданного и фактического положения). А догонит это двигатель (ограничение по частоте вращения) или нет – это другой вопрос. Цитата(_Pasha @ Feb 27 2009, 23:51) ..Что она должна делать, как Вы считаете - как свип-генератор или просто задание скорости? Готовых генераторов много. Надо чтобы с каждым (регулируемым по частоте) импульсом на Step синхронно, а лучше с небольшой задержкой (1мкс) менялось состояние на выходах А и В: 00->01->11->10 и так по кругу. При реверсе соответственно: 10->11->01->00….
|
|
|
|
|
|
|
|
Feb 27 2009, 21:46
|
чукчхэшаражогрмонтажник
Группа: Участник
Сообщений: 1 852
Регистрация: 13-07-07
Из: Minsk
Пользователь №: 29 094
|
Цитата(arisov @ Feb 28 2009, 00:18) Может не правильно нарисовал, но у меня сервоконтроллер, а не шаговый привод. На рисунке предполагаемого стенда я вместо сигналов с энкодера связанного с двигателем «подаю» от отдельного реверсивного счётчика.
У Gecko ServoDrive G320 этот параметр Step Pulse Frequency = 0 – 250 kHz, у UHU ServoController этот параметр Speed = up to 250 000 steps/s (хотя реально на форумах пишут, что около 130кГц).
Мне скорее всего надо знать максимальную частоту которую может «захватить» сервоконтроллер (микроконтроллер) обрабатывая 2 прерывания - по Step и энкодера. Чтобы гарантированно знать, что ни один импульс не пропадёт, все запомнятся (в счетчиках заданного и фактического положения). А догонит это двигатель (ограничение по частоте вращения) или нет – это другой вопрос.
... Понял, вас интересует алгоритм программной реализации "быстрого" сервоцикла. Точнее, возможность езды на деревянном велосипеде. Эмулируя сервоцикл, вам нужно иметь программную модель электродвигателя, иначе мне не понятен смысл выражения - Цитата А догонит это двигатель (ограничение по частоте вращения) или нет – это другой вопрос. Если двигатель не отработал, как вы выражаетесь "степ", то у вас не сервопривод.
Сообщение отредактировал evgeny_ch - Feb 27 2009, 21:46
--------------------
Quo vadis?
|
|
|
|
|
|
|
|
Feb 27 2009, 22:08
|
Частый гость
Группа: Свой
Сообщений: 157
Регистрация: 17-02-07
Из: Ульяновск
Пользователь №: 25 455
|
Цитата(_Pasha @ Feb 28 2009, 00:42) Падажжите! Вы для тиньки можете написАть дрыгалку?
….Если согласны, сверим завтра схемы - и вперед. Написать дрыгалку могу, но ночью я лучше с женою «подрыгаюсь»…  Этот параметр необходим для расчёта максимального разрешения энкодера при максимальной частоте вращения двигателя. Например энкодер с разрешением 2000 имп/об при частоте вращения 3 000об/мин «даст» частоту 100кГц. Как же правильно измерить эту частоту? Не подбирать же вручную разрешение энкодера и ждать когда настанет большое рассогласование? Вариант, предложеный Огурцовым, я думаю неплох. Цитата(evgeny_ch @ Feb 28 2009, 00:46) Если двигатель не отработал, как вы выражаетесь "степ", то у вас не сервопривод. Я и написал, что это другой вопрос.
|
|
|
|
|
|
2 чел. читают эту тему (гостей: 2, скрытых пользователей: 0)
Пользователей: 0

|
|
|