| |
 Быстрый ПИД-регулятор Быстрый ПИД-регулятор, На отрезном станке. Новичёк просит помощи. |
|
|
|
|
  Mar 27 2017, 09:07 Mar 27 2017, 09:07
|
Местный

Группа: Свой
Сообщений: 287
Регистрация: 3-12-07
Из: г.Казань
Пользователь №: 32 913

|
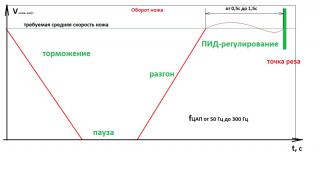
Добрый день! С ПИД-регуляторами ранее дела не имел, прошу помощи по теории и практике ПИД- регулирования. Во-первых, пожалуйста, подскажите хорошую книгу по дискретным ПИД-регуляторам, по тому, как составить модель объекта регулирования, как настроить коэффициенты регулятор. Во-вторых, подскажите по глупым вопросам конкретной системы с дискретным ПИД-регулятором. ПИД-регулятор управляет вращением ножей отрезного станка. По линии бежит полотно, его надо резать на листы определённой длины. На линии стоит энкодер, которым измеряется скорость линии. У ножа тоже стоит энкодер, по которому измеряется текущее положение ножа и скорость. Точка реза ножа определена, алгоритм повторяется после каждого реза с этой точки. Алгоритм работы контроллера, в состав которого входит ПИД-регулятор, показан на рисунке. Работа ножей состоит из четырёх этапов: торможение, пауза, разгон, коррекции средней скорости. На этапе коррекции должен работать ПИД-регулятор. Этап коррекции занимает, в среднем, от 0,5с до 1,5с. Я не знаю, много это или мало, но эту величину можно менять за счёт изменения времени паузы ножа. С теорией ПИД-регулирования у меня пока очень плохо. Пока знаю, что для того, чтобы рассчитать коэффициенты ПИД-регулятора, нужно составить модель объекта управления, т.е. ножа в моём случае. Как это сделать я не знаю. У меня есть возможность проводить измерения на реальном объекте и смотреть результаты регулировки на ПК в режиме реального времени, сохранять их и анализировать. Для реализации была выбрана следующую формулу дискретного регулятора: Код U(n)= Kp*e(n)+Ki*∑e(n) + Kd*[e(n)-e(n-1)] Ознакомился с двумя методами Циглера-Николса, но для них у меня не хватает знаний. Для одного метода я не знаю, как получить реакцию объекта управления на ступенчатое воздействие, по которому определяется параметры, участвующие в расчёте Kp, Ki, Kd. Для другого метода, по которому измеряются собственные колебания объекта, находящегося на границе устойчивости, у меня нет понимания, как эти колебания измерить, потому что нож находится в режиме ПИД-регулирования не всё время вращения, а только ближе к концу каждого оборота. Я смогу ввести нож в режим, когда он вращается с постоянной скоростью и всегда находится в режиме ПИД-регулирования. Далее, я переведу ПИД-регулятор в П-регулятор и получу колебания, измерю их период. Но у меня сомнения следующего рода: В реальности нож будет работать в другом режиме, т.е. на других скоростях и время на регулирование – это не время полного оборота, а половина, в лучшем случае. Подойдут ли полученные таким способом коэффициенты для реальной работы?
Эскизы прикрепленных изображений
--------------------
Сжимаются ужи насмешкой лжи
|
|
|
|
|
|
|
 |
Ответов
|
|
Mar 27 2017, 12:34
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
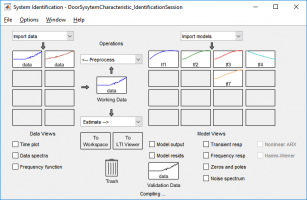
Цитата(Daedal07 @ Mar 27 2017, 12:07)  С ПИД-регуляторами ранее дела не имел, прошу помощи по теории и практике ПИД- регулирования. Это делается немного не так. Лезть в теорию не надо. Открываете такой тулз в Matlab, называется System Identification.
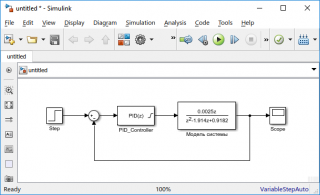
Вводите туда запись воздействия и отклика вашей системы. Воздействие может быть любой формы, не обязательно ступенчатое. Выбираете порядок модели и получаете оценку ее параметров. Можете повторить для других порядков модели или для нелинейных моделей. Потом выбранную модель помещаете в такую диаграмму как внизу.
Щелкаете PID_controller и там в диалоге увидите кнопку Tune. Перед этим проверьте какую архитектуру PID хотите видеть. После Tune вы будете иметь идеально настроенный на модель PID. Потом щелкает в меню Simulink пункт Embedded Coder и получаете чистый код на C готовый к исполнению на каком-нибудь Kinetis ARM Cortex-M4 А можете просто переписать коэффициенты из блока PID_controller в свою программу.
|
|
|
|
|
|
|
|
Mar 27 2017, 15:17
|
Местный
Группа: Свой
Сообщений: 287
Регистрация: 3-12-07
Из: г.Казань
Пользователь №: 32 913
|
Цитата(AlexandrY @ Mar 27 2017, 15:34) Это делается немного не так. Лезть в теорию не надо.
...
Вводите туда запись воздействия и отклика вашей системы. Воздействие может быть любой формы, не обязательно ступенчатое.
Выбираете порядок модели и получаете оценку ее параметров. Как я уже писал, у меня в плане теории тяжёлый случай.  Я не знаю какого порядка модель и как вообще её составить. По каким исходным данным мне ориентироваться, чтобы узнать, какая модель у меня? Возможно, я не всё указал в вопросе, что важного нужно знать о станке, чтобы получить порядок модели? Цитата(AlexandrY @ Mar 27 2017, 15:34) Можете повторить для других порядков модели или для нелинейных моделей. Если со временем не будет ясности, то, да, я буду перебирать модели, но, мне кажется, что это не подход. Хотелось и знаний получить по ходу работы. Цитата(AlexandrY @ Mar 27 2017, 15:34) Перед этим проверьте какую архитектуру PID хотите видеть. И этого я тоже не знаю. Пока без разницы, мне ведь всё равно в дискретную форму переводить архитектуру, ресурсы железа есть, можно любую сделать. Как дилетант, я так вижу сейчас, по крайней мере, этот вопрос. Цитата(AlexandrY @ Mar 27 2017, 15:34) Потом щелкает в меню Simulink пункт Embedded Coder и получаете чистый код на C готовый к исполнению на каком-нибудь Kinetis ARM Cortex-M4
А можете просто переписать коэффициенты из блока PID_controller в свою программу. В этом нет необходимости. Цитата(AlexandrY @ Mar 27 2017, 15:34) ...Вводите туда запись воздействия и отклика вашей системы. Чтобы отрезать нужную мне длину, я должен выдержать среднюю скорость ножа на обороте. Разница текущей и требуемой средней скорости - это e(n). Но я не представляю, как физическая величина "средняя скорость" увязывается с "откликом" системы. Я знаю зависимость напряжение/скорость, знаю максимальное ускорение, с которым привод постоянного тока, на входе которого аналоговый сигнал(напряжение) с выхода контроллера с ПИД, ещё отрабатывает воздействие, а выше которого отрубает выход в "0". Следовательно, я знаю, какое напряжение подать, чтобы получить нужную в данный момент текущую скорость ножа. В таком режиме и идёт работа и могла бы идти и до момента реза, но понятно, что так не бывает.. Из-за инерции вала ножа в точку реза нож приходит с запаздыванием и нестабильно, поэтому на конечном интервале нужен ПИД. Что в моём случае будет воздействием, а что откликом, учитывая, что ПИД у меня в конце оборота и что e(n) - это разница средних скоростей ножа? Я пока не понял, как по уму ПИД настраивается, но после определения воздействия и отклика, думаю, тулза матлаба мне поможет. С Вашей помощью, конечно.)
--------------------
Сжимаются ужи насмешкой лжи
|
|
|
|
|
|
|
|
Mar 27 2017, 16:09
|
Гуру
Группа: Модераторы
Сообщений: 8 752
Регистрация: 6-01-06
Пользователь №: 12 883
|
Цитата(Daedal07 @ Mar 27 2017, 18:17) Следовательно, я знаю, какое напряжение подать, чтобы получить нужную в данный момент текущую скорость ножа. Вам нужно освежить курс механики и дифференциальных уравнений. Что Вы режете? Дорогое? С какой точностью? Цитата(Daedal07 @ Mar 27 2017, 18:57) Контроллер сделан, написана прошивка, тестовое ПО на матлаб с графиками и GUI тоже.
Но вот самое важное на закуску оставил. Самое важное нужно делать сначала. Мне так кажется.
|
|
|
|
|
|
Сообщений в этой теме
 Daedal07 Быстрый ПИД-регулятор Mar 27 2017, 09:07 Daedal07 Быстрый ПИД-регулятор Mar 27 2017, 09:07  demiurg_spb Цитата(AlexandrY @ Mar 27 2017, 15:34) ка... Mar 27 2017, 14:22 demiurg_spb Цитата(AlexandrY @ Mar 27 2017, 15:34) ка... Mar 27 2017, 14:22 Daedal07 Цитата(Tanya @ Mar 27 2017, 19:09) Вам ну... Mar 27 2017, 16:20 Tanya Цитата(Daedal07 @ Mar 27 2017, 19:20) Дай... Mar 27 2017, 18:12 TSerg Цитата(Tanya @ Mar 27 2017, 21:12) Мне во... Mar 27 2017, 18:25 Daedal07 Цитата(Tanya @ Mar 27 2017, 21:12) Ваша ф... Mar 27 2017, 18:26 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 18:17) Я п... Mar 27 2017, 20:31 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 27 2017, 21:13 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:13) Я у... Mar 27 2017, 21:45 Daedal07 Цитата(TSerg @ Mar 28 2017, 00:45) Не оби... Mar 27 2017, 21:54 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:54) Зав... Mar 27 2017, 22:11 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 29 2017, 06:29 Tanya Цитата(Daedal07 @ Mar 29 2017, 09:29) Меж... Mar 29 2017, 07:50 Daedal07 Цитата(Tanya @ Mar 29 2017, 10:50) Трудно... Mar 29 2017, 08:15 Tanya Цитата(Daedal07 @ Mar 29 2017, 11:15) Ящи... Mar 29 2017, 08:38 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 11:15) Спр... Mar 29 2017, 08:42 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 11:42) Чт... Mar 29 2017, 09:38 Tanya Цитата(Daedal07 @ Mar 29 2017, 12:38) Я х... Mar 29 2017, 09:50 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 12:38) Нет... Mar 29 2017, 10:11 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:11) Зн... Mar 29 2017, 10:27 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:27) Ящи... Mar 29 2017, 10:43 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:43) Та... Mar 29 2017, 10:49 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:49) Я н... Mar 29 2017, 10:52 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:52) Т.... Mar 30 2017, 10:03 Tanya Цитата(Daedal07 @ Mar 30 2017, 13:03) Но ... Mar 30 2017, 10:21 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 13:03) мне... Mar 30 2017, 11:19 Daedal07 Цитата(AlexandrY @ Mar 30 2017, 14:19) Да... Mar 30 2017, 11:51 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 14:51) Я, ... Mar 30 2017, 12:07 SSerge Цитата(AlexandrY @ Mar 30 2017, 19:07) От... Mar 30 2017, 13:43 Tanya Цитата(Daedal07 @ Mar 29 2017, 13:49) Пус... Mar 29 2017, 10:53 Daedal07 В контуре Привод - Двигатель обнаружился тахогенер... Mar 29 2017, 12:15 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:15) В к... Mar 29 2017, 12:23 Daedal07 Цитата(TSerg @ Mar 29 2017, 15:23) Тогда ... Mar 29 2017, 12:27 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:27) Поч... Mar 29 2017, 15:25 TSerg Это диплом? Mar 27 2017, 15:51 Daedal07 Цитата(TSerg @ Mar 27 2017, 18:51) Это ди... Mar 27 2017, 15:57 TSerg Цитата(Daedal07 @ Mar 27 2017, 18:57) Есл... Mar 27 2017, 16:43 Daedal07 Цитата(TSerg @ Mar 27 2017, 19:41) Безотв... Mar 27 2017, 16:47 TSerg Цитата(Daedal07 @ Mar 27 2017, 19:47) Спр... Mar 27 2017, 18:31 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:31) Таня В... Mar 27 2017, 18:48 TSerg Цитата(Daedal07 @ Mar 27 2017, 21:48) Как... Mar 27 2017, 18:56 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:56) Физика... Mar 27 2017, 19:09 TSerg Все от того, что Вы сразу не привели схему Вашей к... Mar 27 2017, 19:18 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:18) Все от... Mar 27 2017, 19:25 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:25) Упр... Mar 27 2017, 19:37 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:37) Не фак... Mar 27 2017, 19:45 TSerg Я, конечно, всех условий работы этой резательной м... Mar 27 2017, 19:50 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:50) Я, кон... Mar 27 2017, 19:59 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:59) Тол... Mar 27 2017, 20:06 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:06) Вы - с... Mar 27 2017, 20:15 TSerg Цитата(Daedal07 @ Mar 27 2017, 23:15) Нап... Mar 27 2017, 20:41 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:41) Регист... Mar 28 2017, 20:14 AlexandrY Цитата(Daedal07 @ Mar 28 2017, 23:14) Что... Mar 29 2017, 06:07 somebody111 ЦитатаПока знаю, что для того, чтобы рассчитать ко... Apr 3 2017, 17:12 Daedal07 Цитата(somebody111 @ Apr 3 2017, 20:12) Д... Apr 9 2017, 00:18 alexr22b Цитата(Daedal07 @ Apr 9 2017, 04:18) Это ... Apr 9 2017, 00:30 somebody111 Окай, давай учиться вместе. Настройка ПИД регулято... Apr 3 2017, 23:23 AlexandrY Цитата(somebody111 @ Apr 4 2017, 02:23) В... Apr 4 2017, 06:07 somebody111 ЦитатаInstaSPIN
Могу сказать даже больше - я его и... Apr 4 2017, 11:51 AlexandrY Цитата(somebody111 @ Apr 4 2017, 14:51) В... Apr 4 2017, 13:46 somebody111 ЦитатаInstaSPIN у TI идет без исходников, поэтому ... Apr 4 2017, 14:08 AlexandrY Цитата(somebody111 @ Apr 4 2017, 17:08) Н... Apr 4 2017, 14:36 somebody111 Мне хватило понимания того, что в заявленном там а... Apr 4 2017, 15:03 @Ark Цитата(Daedal07 @ Mar 27 2017, 12:07) По ... Apr 4 2017, 22:42 AlexandrY Цитата(@Ark @ Apr 5 2017, 01:42) Теперь п... Apr 5 2017, 06:15 @Ark Цитата(AlexandrY @ Apr 5 2017, 09:15) У T... Apr 5 2017, 07:51 Daedal07 Цитата(@Ark @ Apr 5 2017, 01:42) Очередно... Apr 9 2017, 01:22 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:22) Опят... Apr 9 2017, 01:33 Daedal07 Цитата(@Ark @ Apr 9 2017, 04:33) Вы опред... Apr 9 2017, 01:53 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:53) Эта ... Apr 9 2017, 02:24 Daedal07 Цитата(@Ark @ Apr 9 2017, 05:24) Ничего В... Apr 9 2017, 08:46 @Ark Вы почему-то упорно придерживаетесь своей первонач... Apr 9 2017, 10:35 Daedal07 Цитата(@Ark @ Apr 9 2017, 13:35) Видимо, ... Apr 9 2017, 11:16 @Ark Цитата(Daedal07 @ Apr 9 2017, 14:16) У ме... Apr 9 2017, 12:47 Daedal07 Цитата(@Ark @ Apr 9 2017, 15:47) То есть ... Apr 9 2017, 13:15 @Ark Цитата(Daedal07 @ Apr 9 2017, 16:15) Цита... Apr 9 2017, 15:39 Daedal07 Цитата(@Ark @ Apr 9 2017, 18:39) Сейчас т... Apr 9 2017, 15:48 AlexandrY Цитата(Daedal07 @ Apr 9 2017, 18:48) Сейч... Apr 9 2017, 17:59 Gruffly >и для разной длины картона
Так это картон?
Так... Apr 9 2017, 13:54 Daedal07 Цитата(Gruffly @ Apr 9 2017, 16:54) >и... Apr 9 2017, 13:55 Gruffly В энергетике процесса рубки/реза. Apr 9 2017, 14:04 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:04) В эне... Apr 9 2017, 14:07 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:07) Како... Apr 9 2017, 14:46 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:46) Прямо... Apr 9 2017, 14:59 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:59) Крас... Apr 9 2017, 15:16 Gruffly С Вашего позволения, еще несколько вопросов:
1. Дв... Apr 9 2017, 17:45 Daedal07 Цитата(Gruffly @ Apr 9 2017, 20:45) С Ваш... Apr 9 2017, 18:04 Gruffly Daedal07
Так, примерно понятно, но - уточнения.
... Apr 9 2017, 20:02 Daedal07 Цитата(Gruffly @ Apr 9 2017, 23:02) Т.е. ... Apr 9 2017, 20:19 @Ark Цитата(Gruffly @ Apr 9 2017, 23:02) Вся п... Apr 9 2017, 22:10 Daedal07 Цитата(@Ark @ Apr 10 2017, 01:10) Все это... Apr 9 2017, 22:22 Gruffly Цитата(@Ark @ Apr 9 2017, 23:10) Все это ... Apr 9 2017, 22:46 @Ark Цитата(Gruffly @ Apr 10 2017, 01:46) Чем ... Apr 9 2017, 23:08 Gruffly Цитата(@Ark @ Apr 10 2017, 00:08) Речь не... Apr 10 2017, 00:51 Gruffly Первые прикидки по вашей модели привода и САУ ... Apr 9 2017, 21:53 Daedal07 Цитата(Gruffly @ Apr 10 2017, 00:53) Перв... Apr 9 2017, 22:59 Daedal07 Цитата(Tanya @ Mar 27 2017, 19:09) Вам ну... Mar 27 2017, 16:20 Tanya Цитата(Daedal07 @ Mar 27 2017, 19:20) Дай... Mar 27 2017, 18:12 TSerg Цитата(Tanya @ Mar 27 2017, 21:12) Мне во... Mar 27 2017, 18:25 Daedal07 Цитата(Tanya @ Mar 27 2017, 21:12) Ваша ф... Mar 27 2017, 18:26 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 18:17) Я п... Mar 27 2017, 20:31 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 27 2017, 21:13 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:13) Я у... Mar 27 2017, 21:45 Daedal07 Цитата(TSerg @ Mar 28 2017, 00:45) Не оби... Mar 27 2017, 21:54 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:54) Зав... Mar 27 2017, 22:11 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 29 2017, 06:29 Tanya Цитата(Daedal07 @ Mar 29 2017, 09:29) Меж... Mar 29 2017, 07:50 Daedal07 Цитата(Tanya @ Mar 29 2017, 10:50) Трудно... Mar 29 2017, 08:15 Tanya Цитата(Daedal07 @ Mar 29 2017, 11:15) Ящи... Mar 29 2017, 08:38 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 11:15) Спр... Mar 29 2017, 08:42 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 11:42) Чт... Mar 29 2017, 09:38 Tanya Цитата(Daedal07 @ Mar 29 2017, 12:38) Я х... Mar 29 2017, 09:50 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 12:38) Нет... Mar 29 2017, 10:11 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:11) Зн... Mar 29 2017, 10:27 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:27) Ящи... Mar 29 2017, 10:43 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:43) Та... Mar 29 2017, 10:49 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:49) Я н... Mar 29 2017, 10:52 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:52) Т.... Mar 30 2017, 10:03 Tanya Цитата(Daedal07 @ Mar 30 2017, 13:03) Но ... Mar 30 2017, 10:21 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 13:03) мне... Mar 30 2017, 11:19 Daedal07 Цитата(AlexandrY @ Mar 30 2017, 14:19) Да... Mar 30 2017, 11:51 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 14:51) Я, ... Mar 30 2017, 12:07 SSerge Цитата(AlexandrY @ Mar 30 2017, 19:07) От... Mar 30 2017, 13:43 Tanya Цитата(Daedal07 @ Mar 29 2017, 13:49) Пус... Mar 29 2017, 10:53 Daedal07 В контуре Привод - Двигатель обнаружился тахогенер... Mar 29 2017, 12:15 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:15) В к... Mar 29 2017, 12:23 Daedal07 Цитата(TSerg @ Mar 29 2017, 15:23) Тогда ... Mar 29 2017, 12:27 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:27) Поч... Mar 29 2017, 15:25 TSerg Это диплом? Mar 27 2017, 15:51 Daedal07 Цитата(TSerg @ Mar 27 2017, 18:51) Это ди... Mar 27 2017, 15:57 TSerg Цитата(Daedal07 @ Mar 27 2017, 18:57) Есл... Mar 27 2017, 16:43 Daedal07 Цитата(TSerg @ Mar 27 2017, 19:41) Безотв... Mar 27 2017, 16:47 TSerg Цитата(Daedal07 @ Mar 27 2017, 19:47) Спр... Mar 27 2017, 18:31 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:31) Таня В... Mar 27 2017, 18:48 TSerg Цитата(Daedal07 @ Mar 27 2017, 21:48) Как... Mar 27 2017, 18:56 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:56) Физика... Mar 27 2017, 19:09 TSerg Все от того, что Вы сразу не привели схему Вашей к... Mar 27 2017, 19:18 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:18) Все от... Mar 27 2017, 19:25 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:25) Упр... Mar 27 2017, 19:37 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:37) Не фак... Mar 27 2017, 19:45 TSerg Я, конечно, всех условий работы этой резательной м... Mar 27 2017, 19:50 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:50) Я, кон... Mar 27 2017, 19:59 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:59) Тол... Mar 27 2017, 20:06 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:06) Вы - с... Mar 27 2017, 20:15 TSerg Цитата(Daedal07 @ Mar 27 2017, 23:15) Нап... Mar 27 2017, 20:41 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:41) Регист... Mar 28 2017, 20:14 AlexandrY Цитата(Daedal07 @ Mar 28 2017, 23:14) Что... Mar 29 2017, 06:07 somebody111 ЦитатаПока знаю, что для того, чтобы рассчитать ко... Apr 3 2017, 17:12 Daedal07 Цитата(somebody111 @ Apr 3 2017, 20:12) Д... Apr 9 2017, 00:18 alexr22b Цитата(Daedal07 @ Apr 9 2017, 04:18) Это ... Apr 9 2017, 00:30 somebody111 Окай, давай учиться вместе. Настройка ПИД регулято... Apr 3 2017, 23:23 AlexandrY Цитата(somebody111 @ Apr 4 2017, 02:23) В... Apr 4 2017, 06:07 somebody111 ЦитатаInstaSPIN
Могу сказать даже больше - я его и... Apr 4 2017, 11:51 AlexandrY Цитата(somebody111 @ Apr 4 2017, 14:51) В... Apr 4 2017, 13:46 somebody111 ЦитатаInstaSPIN у TI идет без исходников, поэтому ... Apr 4 2017, 14:08 AlexandrY Цитата(somebody111 @ Apr 4 2017, 17:08) Н... Apr 4 2017, 14:36 somebody111 Мне хватило понимания того, что в заявленном там а... Apr 4 2017, 15:03 @Ark Цитата(Daedal07 @ Mar 27 2017, 12:07) По ... Apr 4 2017, 22:42 AlexandrY Цитата(@Ark @ Apr 5 2017, 01:42) Теперь п... Apr 5 2017, 06:15 @Ark Цитата(AlexandrY @ Apr 5 2017, 09:15) У T... Apr 5 2017, 07:51 Daedal07 Цитата(@Ark @ Apr 5 2017, 01:42) Очередно... Apr 9 2017, 01:22 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:22) Опят... Apr 9 2017, 01:33 Daedal07 Цитата(@Ark @ Apr 9 2017, 04:33) Вы опред... Apr 9 2017, 01:53 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:53) Эта ... Apr 9 2017, 02:24 Daedal07 Цитата(@Ark @ Apr 9 2017, 05:24) Ничего В... Apr 9 2017, 08:46 @Ark Вы почему-то упорно придерживаетесь своей первонач... Apr 9 2017, 10:35 Daedal07 Цитата(@Ark @ Apr 9 2017, 13:35) Видимо, ... Apr 9 2017, 11:16 @Ark Цитата(Daedal07 @ Apr 9 2017, 14:16) У ме... Apr 9 2017, 12:47 Daedal07 Цитата(@Ark @ Apr 9 2017, 15:47) То есть ... Apr 9 2017, 13:15 @Ark Цитата(Daedal07 @ Apr 9 2017, 16:15) Цита... Apr 9 2017, 15:39 Daedal07 Цитата(@Ark @ Apr 9 2017, 18:39) Сейчас т... Apr 9 2017, 15:48 AlexandrY Цитата(Daedal07 @ Apr 9 2017, 18:48) Сейч... Apr 9 2017, 17:59 Gruffly >и для разной длины картона
Так это картон?
Так... Apr 9 2017, 13:54 Daedal07 Цитата(Gruffly @ Apr 9 2017, 16:54) >и... Apr 9 2017, 13:55 Gruffly В энергетике процесса рубки/реза. Apr 9 2017, 14:04 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:04) В эне... Apr 9 2017, 14:07 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:07) Како... Apr 9 2017, 14:46 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:46) Прямо... Apr 9 2017, 14:59 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:59) Крас... Apr 9 2017, 15:16 Gruffly С Вашего позволения, еще несколько вопросов:
1. Дв... Apr 9 2017, 17:45 Daedal07 Цитата(Gruffly @ Apr 9 2017, 20:45) С Ваш... Apr 9 2017, 18:04 Gruffly Daedal07
Так, примерно понятно, но - уточнения.
... Apr 9 2017, 20:02 Daedal07 Цитата(Gruffly @ Apr 9 2017, 23:02) Т.е. ... Apr 9 2017, 20:19 @Ark Цитата(Gruffly @ Apr 9 2017, 23:02) Вся п... Apr 9 2017, 22:10 Daedal07 Цитата(@Ark @ Apr 10 2017, 01:10) Все это... Apr 9 2017, 22:22 Gruffly Цитата(@Ark @ Apr 9 2017, 23:10) Все это ... Apr 9 2017, 22:46 @Ark Цитата(Gruffly @ Apr 10 2017, 01:46) Чем ... Apr 9 2017, 23:08 Gruffly Цитата(@Ark @ Apr 10 2017, 00:08) Речь не... Apr 10 2017, 00:51 Gruffly Первые прикидки по вашей модели привода и САУ ... Apr 9 2017, 21:53 Daedal07 Цитата(Gruffly @ Apr 10 2017, 00:53) Перв... Apr 9 2017, 22:59
3 страниц  1 2 3 >
1 2 3 >
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
|