| |
 Быстрый ПИД-регулятор Быстрый ПИД-регулятор, На отрезном станке. Новичёк просит помощи. |
|
|
|
|
  Mar 27 2017, 09:07 Mar 27 2017, 09:07
|
Местный

Группа: Свой
Сообщений: 287
Регистрация: 3-12-07
Из: г.Казань
Пользователь №: 32 913

|
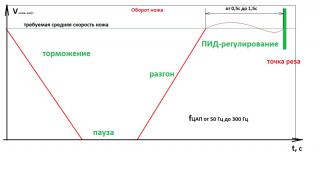
Добрый день! С ПИД-регуляторами ранее дела не имел, прошу помощи по теории и практике ПИД- регулирования. Во-первых, пожалуйста, подскажите хорошую книгу по дискретным ПИД-регуляторам, по тому, как составить модель объекта регулирования, как настроить коэффициенты регулятор. Во-вторых, подскажите по глупым вопросам конкретной системы с дискретным ПИД-регулятором. ПИД-регулятор управляет вращением ножей отрезного станка. По линии бежит полотно, его надо резать на листы определённой длины. На линии стоит энкодер, которым измеряется скорость линии. У ножа тоже стоит энкодер, по которому измеряется текущее положение ножа и скорость. Точка реза ножа определена, алгоритм повторяется после каждого реза с этой точки. Алгоритм работы контроллера, в состав которого входит ПИД-регулятор, показан на рисунке. Работа ножей состоит из четырёх этапов: торможение, пауза, разгон, коррекции средней скорости. На этапе коррекции должен работать ПИД-регулятор. Этап коррекции занимает, в среднем, от 0,5с до 1,5с. Я не знаю, много это или мало, но эту величину можно менять за счёт изменения времени паузы ножа. С теорией ПИД-регулирования у меня пока очень плохо. Пока знаю, что для того, чтобы рассчитать коэффициенты ПИД-регулятора, нужно составить модель объекта управления, т.е. ножа в моём случае. Как это сделать я не знаю. У меня есть возможность проводить измерения на реальном объекте и смотреть результаты регулировки на ПК в режиме реального времени, сохранять их и анализировать. Для реализации была выбрана следующую формулу дискретного регулятора: Код U(n)= Kp*e(n)+Ki*∑e(n) + Kd*[e(n)-e(n-1)] Ознакомился с двумя методами Циглера-Николса, но для них у меня не хватает знаний. Для одного метода я не знаю, как получить реакцию объекта управления на ступенчатое воздействие, по которому определяется параметры, участвующие в расчёте Kp, Ki, Kd. Для другого метода, по которому измеряются собственные колебания объекта, находящегося на границе устойчивости, у меня нет понимания, как эти колебания измерить, потому что нож находится в режиме ПИД-регулирования не всё время вращения, а только ближе к концу каждого оборота. Я смогу ввести нож в режим, когда он вращается с постоянной скоростью и всегда находится в режиме ПИД-регулирования. Далее, я переведу ПИД-регулятор в П-регулятор и получу колебания, измерю их период. Но у меня сомнения следующего рода: В реальности нож будет работать в другом режиме, т.е. на других скоростях и время на регулирование – это не время полного оборота, а половина, в лучшем случае. Подойдут ли полученные таким способом коэффициенты для реальной работы?
Эскизы прикрепленных изображений
--------------------
Сжимаются ужи насмешкой лжи
|
|
|
|
|
|
|
 |
Ответов
|
|
Apr 3 2017, 23:23
|
Частый гость
Группа: Участник
Сообщений: 190
Регистрация: 2-03-11
Пользователь №: 63 341
|
Окай, давай учиться вместе. Настройка ПИД регулятора скорости строится по принципу полной внутренней компенсации, а конкретнее он должен своей постоянное времени компенсировать самую большую постоянную времени системы. Это что касается главного контура системы. В подчиненном контуре тока стоит пи регулятор и должен компенсировать еще меньшую постоянную времени. Это и есть принцип подчиненного регулирования координат. А теперь давайте на практике определим эти постоянные времени. Начнем с простого -двигателя. Там постоянная времени определяется как L/R, где L-индуктивность якоря, R-его сопротивление. Давайте на объекте устроит лабораторную работу - определить активное и индуктивное сопротивление ротора. Запаслись омметром, измеряем сопротивление, тыкаем...ой...он 0 показывает. Что не так?Ой, там же щетки.., чтобы было совсем честно надо ротор вручную прокрутить, чтобы что-то там показало. Это не стеб- честно прокручивал для измерений ротор 400кВт движка, а потом все равно нужно было ввести поправку из-за ткс меди Ну да ладно. А что если (а другого не бывает), что изоляция медная, там ведь ТКС и для обмотки 100 град - рабочая температура (а с H изоляцией 170 - легко), т.е. что, постоянную времени надо в функции температуры увязывать? Вы смеетесь?А решается просто - она берется от "балды", потому что контур тока в электроприводе - он робастный к настройкам ПИ -регулятора тока- если один раз когда-то угадал, то будет идти речь о подстройки и ничего не изменится. С контуром скорости интереснее. Если открыть книжку по оптимальному управлению, то там для определения постоянной времени, нужно приведенный момент инерции искать. Как там "симметричный оптимум" и там в теории есть такой коэффициент, который вроде как "наладочный" в диапазоне от 0.0000001 до 10000000. Ну т.е. вот вам 5-ти этажная формула, туда надо вставить все параметры объекта (а они конечно же есть у нас) и при этом надо будет подобрать этот коэффициентик. Ну или не подбирай - определи момент инерции. А придёт заказчик и скажет - плохо держит нагрузку или, наоборот, слишком быстро разгоняется. Оно для мозгов - это конечно интересно и даже сидя за диваном поднимается самооценка, но вот на практике, извините, такой подход работает только если объект управления либо очень сложный (читать нелинейный), заказчик это понимает и предоставляет время и ресурсы заниматься наукой, либо объект ответственный и нужно хоть как-то перестраховаться - да, matlab помогает, но надо составлять модель двигателя, системы управления, уравнение нагрузки и идентифицировать модель. А то, что там ему сказали взять апериодическое звено, завести обратную связь и выдать это за что-то серьёзное...даже для курсовой работы на пол параграфа не тянет. Я вам и без матлаба скажу, что постоянная времени ПИ регулятора должна в теории совпасть с постоянной времени апреиодического звена - тогда они друг-друга компенсируют. Это называется принцип полной внутренней компенсации, вокруг которого и построена вся теория оптимального управления электроприводом. Эти все методы отлично работают, когда идет речь о проектировании источника питания с обратными связями, где реально все параметры наблюдаемы и измеряемы, потому что их определяет разработчик. Здесь идет речь об электроприводе, когда все, что у вас есть - это шилдик с двигателя и понимание электромеханики. Обратите особое внимание, не радиочастот, антенн и приёмников. Все, что нужно автору темы - сделать регулятор и подобрать 3 коэффициента на объекте и любым способом убрать внутренний ПИД главного контура скорости. Привод сам готовый, т.е. он (ну раз вы захотели теории) асимптотически устойчив и все будет сводится к "надо быстрее" - больше П, надо точнее, надо больше "И", тут перерегулирование - надо больше П и меньше И. ВСЕ. Можете с Д составляющей поиграться, но там придется фильтровать обратную связь по скорости и эту постоянную времени тоже придется как-то компенсировать. Вы ему в матлабе рекомендуете апериодическое звено моделировать, а что же не говорите, что тахогенератор шумит как кот в марте и если не фильтровать, то Д составляющая погасит всю систему? Вы, конечно же, захотите сделать ПИД и вмажете в обратную связь приличную постоянную времени, сведя (опять умная теория) запас устойчивости системы в 0, отчего её начнет трясти и тс, не понимая, что это вообще такое, на месяц уйдет в нирвану. И придет к одному простому выводу - с П-регулятором работает сразу и без проблем. А все потому, что с П-регулятором передаточная функция всей системы превращается в апериодическое звено ну или фильтр низкой частоты, если не нравится слово "апериодическое звено". А на нулевой скорости там еще интереснее -из-за тех же счёток в сигнале будет постоянная составляющая, которую надо будет резать, но и это не принципиально, главное развести человека на моделирование апериодического звена в матлабе! Браво! Цитата Во всех частотниках есть такая вещь, как пользовательский PID, но кроме него там еще неизвестное количество регулируемых контуров и фильтров. Там всего 2 контура -главный и подчиненный. Фильтра в очень старых частотниках были...там постоянные времени наносекунды. Больше не получается, потому что они вводят фазовые сдвиги, к которым наблюдатель двигателя крайне чувствителен. В новых частотниках так уже не делают -вешают штук 5-10 ацп на канал и оцифровывают; результат усредняют.На выходе получаете крутую фильтрацию с минимальным запаздыванием. В главном контуре фильтры не ставят из-за снижения запаса устойчивости по фазе и ненужности. Единственно, что не документировано -там все ПИДы с компенсацией насыщения и блок компенсации перекрестных связей, который оказывает влияние в очень специфических ситуациях. Настройки ПИ-регулятора тока бестолку выводить юзеру - они везде одинаковые и никогда не заметите разницы. Её можно увидеть только если на экран вывести график задания тока подчиненному контуру и реальный ток. В самой худшей ситуации там будет процентов 10 отклонение от расчёта, ну то есть нисколько
Сообщение отредактировал somebody111 - Apr 3 2017, 23:37
|
|
|
|
|
|
|
|
Apr 4 2017, 06:07
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(somebody111 @ Apr 4 2017, 02:23)  Вы ему в матлабе рекомендуете апериодическое звено моделировать, а что же не говорите, что ... Современные подходы к регулированию отказываются от попыток моделирования объекта управления да и от PID-а. Смотрите метод ADRC ссылку на который я давал выше. Кстати он давно уже включен в известные библиотеки управления моторами для микроконтроллеров. Например InstaSPIN от TI Так что не понятно с кем вы спорите. 
|
|
|
|
|
|
Сообщений в этой теме
 Daedal07 Быстрый ПИД-регулятор Mar 27 2017, 09:07 Daedal07 Быстрый ПИД-регулятор Mar 27 2017, 09:07 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 12:07) С П... Mar 27 2017, 12:34 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 12:07) С П... Mar 27 2017, 12:34 demiurg_spb Цитата(AlexandrY @ Mar 27 2017, 15:34) ка... Mar 27 2017, 14:22 demiurg_spb Цитата(AlexandrY @ Mar 27 2017, 15:34) ка... Mar 27 2017, 14:22 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 15:34) Эт... Mar 27 2017, 15:17 Tanya Цитата(Daedal07 @ Mar 27 2017, 18:17) Сле... Mar 27 2017, 16:09 Daedal07 Цитата(Tanya @ Mar 27 2017, 19:09) Вам ну... Mar 27 2017, 16:20 Tanya Цитата(Daedal07 @ Mar 27 2017, 19:20) Дай... Mar 27 2017, 18:12 TSerg Цитата(Tanya @ Mar 27 2017, 21:12) Мне во... Mar 27 2017, 18:25 Daedal07 Цитата(Tanya @ Mar 27 2017, 21:12) Ваша ф... Mar 27 2017, 18:26 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 18:17) Я п... Mar 27 2017, 20:31 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 27 2017, 21:13 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:13) Я у... Mar 27 2017, 21:45 Daedal07 Цитата(TSerg @ Mar 28 2017, 00:45) Не оби... Mar 27 2017, 21:54 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:54) Зав... Mar 27 2017, 22:11 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 29 2017, 06:29 Tanya Цитата(Daedal07 @ Mar 29 2017, 09:29) Меж... Mar 29 2017, 07:50 Daedal07 Цитата(Tanya @ Mar 29 2017, 10:50) Трудно... Mar 29 2017, 08:15 Tanya Цитата(Daedal07 @ Mar 29 2017, 11:15) Ящи... Mar 29 2017, 08:38 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 11:15) Спр... Mar 29 2017, 08:42 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 11:42) Чт... Mar 29 2017, 09:38 Tanya Цитата(Daedal07 @ Mar 29 2017, 12:38) Я х... Mar 29 2017, 09:50 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 12:38) Нет... Mar 29 2017, 10:11 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:11) Зн... Mar 29 2017, 10:27 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:27) Ящи... Mar 29 2017, 10:43 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:43) Та... Mar 29 2017, 10:49 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:49) Я н... Mar 29 2017, 10:52 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:52) Т.... Mar 30 2017, 10:03 Tanya Цитата(Daedal07 @ Mar 30 2017, 13:03) Но ... Mar 30 2017, 10:21 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 13:03) мне... Mar 30 2017, 11:19 Daedal07 Цитата(AlexandrY @ Mar 30 2017, 14:19) Да... Mar 30 2017, 11:51 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 14:51) Я, ... Mar 30 2017, 12:07 SSerge Цитата(AlexandrY @ Mar 30 2017, 19:07) От... Mar 30 2017, 13:43 Tanya Цитата(Daedal07 @ Mar 29 2017, 13:49) Пус... Mar 29 2017, 10:53 Daedal07 В контуре Привод - Двигатель обнаружился тахогенер... Mar 29 2017, 12:15 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:15) В к... Mar 29 2017, 12:23 Daedal07 Цитата(TSerg @ Mar 29 2017, 15:23) Тогда ... Mar 29 2017, 12:27 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:27) Поч... Mar 29 2017, 15:25 TSerg Это диплом? Mar 27 2017, 15:51 Daedal07 Цитата(TSerg @ Mar 27 2017, 18:51) Это ди... Mar 27 2017, 15:57 TSerg Цитата(Daedal07 @ Mar 27 2017, 18:57) Есл... Mar 27 2017, 16:43 Daedal07 Цитата(TSerg @ Mar 27 2017, 19:41) Безотв... Mar 27 2017, 16:47 TSerg Цитата(Daedal07 @ Mar 27 2017, 19:47) Спр... Mar 27 2017, 18:31 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:31) Таня В... Mar 27 2017, 18:48 TSerg Цитата(Daedal07 @ Mar 27 2017, 21:48) Как... Mar 27 2017, 18:56 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:56) Физика... Mar 27 2017, 19:09 TSerg Все от того, что Вы сразу не привели схему Вашей к... Mar 27 2017, 19:18 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:18) Все от... Mar 27 2017, 19:25 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:25) Упр... Mar 27 2017, 19:37 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:37) Не фак... Mar 27 2017, 19:45 TSerg Я, конечно, всех условий работы этой резательной м... Mar 27 2017, 19:50 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:50) Я, кон... Mar 27 2017, 19:59 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:59) Тол... Mar 27 2017, 20:06 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:06) Вы - с... Mar 27 2017, 20:15 TSerg Цитата(Daedal07 @ Mar 27 2017, 23:15) Нап... Mar 27 2017, 20:41 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:41) Регист... Mar 28 2017, 20:14 AlexandrY Цитата(Daedal07 @ Mar 28 2017, 23:14) Что... Mar 29 2017, 06:07 somebody111 ЦитатаПока знаю, что для того, чтобы рассчитать ко... Apr 3 2017, 17:12 Daedal07 Цитата(somebody111 @ Apr 3 2017, 20:12) Д... Apr 9 2017, 00:18 alexr22b Цитата(Daedal07 @ Apr 9 2017, 04:18) Это ... Apr 9 2017, 00:30 somebody111 ЦитатаInstaSPIN
Могу сказать даже больше - я его и... Apr 4 2017, 11:51 AlexandrY Цитата(somebody111 @ Apr 4 2017, 14:51) В... Apr 4 2017, 13:46 somebody111 ЦитатаInstaSPIN у TI идет без исходников, поэтому ... Apr 4 2017, 14:08 AlexandrY Цитата(somebody111 @ Apr 4 2017, 17:08) Н... Apr 4 2017, 14:36 somebody111 Мне хватило понимания того, что в заявленном там а... Apr 4 2017, 15:03 @Ark Цитата(Daedal07 @ Mar 27 2017, 12:07) По ... Apr 4 2017, 22:42 AlexandrY Цитата(@Ark @ Apr 5 2017, 01:42) Теперь п... Apr 5 2017, 06:15 @Ark Цитата(AlexandrY @ Apr 5 2017, 09:15) У T... Apr 5 2017, 07:51 Daedal07 Цитата(@Ark @ Apr 5 2017, 01:42) Очередно... Apr 9 2017, 01:22 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:22) Опят... Apr 9 2017, 01:33 Daedal07 Цитата(@Ark @ Apr 9 2017, 04:33) Вы опред... Apr 9 2017, 01:53 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:53) Эта ... Apr 9 2017, 02:24 Daedal07 Цитата(@Ark @ Apr 9 2017, 05:24) Ничего В... Apr 9 2017, 08:46 @Ark Вы почему-то упорно придерживаетесь своей первонач... Apr 9 2017, 10:35 Daedal07 Цитата(@Ark @ Apr 9 2017, 13:35) Видимо, ... Apr 9 2017, 11:16 @Ark Цитата(Daedal07 @ Apr 9 2017, 14:16) У ме... Apr 9 2017, 12:47 Daedal07 Цитата(@Ark @ Apr 9 2017, 15:47) То есть ... Apr 9 2017, 13:15 @Ark Цитата(Daedal07 @ Apr 9 2017, 16:15) Цита... Apr 9 2017, 15:39 Daedal07 Цитата(@Ark @ Apr 9 2017, 18:39) Сейчас т... Apr 9 2017, 15:48 AlexandrY Цитата(Daedal07 @ Apr 9 2017, 18:48) Сейч... Apr 9 2017, 17:59 Gruffly >и для разной длины картона
Так это картон?
Так... Apr 9 2017, 13:54 Daedal07 Цитата(Gruffly @ Apr 9 2017, 16:54) >и... Apr 9 2017, 13:55 Gruffly В энергетике процесса рубки/реза. Apr 9 2017, 14:04 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:04) В эне... Apr 9 2017, 14:07 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:07) Како... Apr 9 2017, 14:46 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:46) Прямо... Apr 9 2017, 14:59 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:59) Крас... Apr 9 2017, 15:16 Gruffly С Вашего позволения, еще несколько вопросов:
1. Дв... Apr 9 2017, 17:45 Daedal07 Цитата(Gruffly @ Apr 9 2017, 20:45) С Ваш... Apr 9 2017, 18:04 Gruffly Daedal07
Так, примерно понятно, но - уточнения.
... Apr 9 2017, 20:02 Daedal07 Цитата(Gruffly @ Apr 9 2017, 23:02) Т.е. ... Apr 9 2017, 20:19 @Ark Цитата(Gruffly @ Apr 9 2017, 23:02) Вся п... Apr 9 2017, 22:10 Daedal07 Цитата(@Ark @ Apr 10 2017, 01:10) Все это... Apr 9 2017, 22:22 Gruffly Цитата(@Ark @ Apr 9 2017, 23:10) Все это ... Apr 9 2017, 22:46 @Ark Цитата(Gruffly @ Apr 10 2017, 01:46) Чем ... Apr 9 2017, 23:08 Gruffly Цитата(@Ark @ Apr 10 2017, 00:08) Речь не... Apr 10 2017, 00:51 Gruffly Первые прикидки по вашей модели привода и САУ ... Apr 9 2017, 21:53 Daedal07 Цитата(Gruffly @ Apr 10 2017, 00:53) Перв... Apr 9 2017, 22:59 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 15:34) Эт... Mar 27 2017, 15:17 Tanya Цитата(Daedal07 @ Mar 27 2017, 18:17) Сле... Mar 27 2017, 16:09 Daedal07 Цитата(Tanya @ Mar 27 2017, 19:09) Вам ну... Mar 27 2017, 16:20 Tanya Цитата(Daedal07 @ Mar 27 2017, 19:20) Дай... Mar 27 2017, 18:12 TSerg Цитата(Tanya @ Mar 27 2017, 21:12) Мне во... Mar 27 2017, 18:25 Daedal07 Цитата(Tanya @ Mar 27 2017, 21:12) Ваша ф... Mar 27 2017, 18:26 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 18:17) Я п... Mar 27 2017, 20:31 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 27 2017, 21:13 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:13) Я у... Mar 27 2017, 21:45 Daedal07 Цитата(TSerg @ Mar 28 2017, 00:45) Не оби... Mar 27 2017, 21:54 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:54) Зав... Mar 27 2017, 22:11 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 29 2017, 06:29 Tanya Цитата(Daedal07 @ Mar 29 2017, 09:29) Меж... Mar 29 2017, 07:50 Daedal07 Цитата(Tanya @ Mar 29 2017, 10:50) Трудно... Mar 29 2017, 08:15 Tanya Цитата(Daedal07 @ Mar 29 2017, 11:15) Ящи... Mar 29 2017, 08:38 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 11:15) Спр... Mar 29 2017, 08:42 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 11:42) Чт... Mar 29 2017, 09:38 Tanya Цитата(Daedal07 @ Mar 29 2017, 12:38) Я х... Mar 29 2017, 09:50 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 12:38) Нет... Mar 29 2017, 10:11 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:11) Зн... Mar 29 2017, 10:27 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:27) Ящи... Mar 29 2017, 10:43 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:43) Та... Mar 29 2017, 10:49 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:49) Я н... Mar 29 2017, 10:52 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:52) Т.... Mar 30 2017, 10:03 Tanya Цитата(Daedal07 @ Mar 30 2017, 13:03) Но ... Mar 30 2017, 10:21 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 13:03) мне... Mar 30 2017, 11:19 Daedal07 Цитата(AlexandrY @ Mar 30 2017, 14:19) Да... Mar 30 2017, 11:51 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 14:51) Я, ... Mar 30 2017, 12:07 SSerge Цитата(AlexandrY @ Mar 30 2017, 19:07) От... Mar 30 2017, 13:43 Tanya Цитата(Daedal07 @ Mar 29 2017, 13:49) Пус... Mar 29 2017, 10:53 Daedal07 В контуре Привод - Двигатель обнаружился тахогенер... Mar 29 2017, 12:15 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:15) В к... Mar 29 2017, 12:23 Daedal07 Цитата(TSerg @ Mar 29 2017, 15:23) Тогда ... Mar 29 2017, 12:27 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:27) Поч... Mar 29 2017, 15:25 TSerg Это диплом? Mar 27 2017, 15:51 Daedal07 Цитата(TSerg @ Mar 27 2017, 18:51) Это ди... Mar 27 2017, 15:57 TSerg Цитата(Daedal07 @ Mar 27 2017, 18:57) Есл... Mar 27 2017, 16:43 Daedal07 Цитата(TSerg @ Mar 27 2017, 19:41) Безотв... Mar 27 2017, 16:47 TSerg Цитата(Daedal07 @ Mar 27 2017, 19:47) Спр... Mar 27 2017, 18:31 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:31) Таня В... Mar 27 2017, 18:48 TSerg Цитата(Daedal07 @ Mar 27 2017, 21:48) Как... Mar 27 2017, 18:56 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:56) Физика... Mar 27 2017, 19:09 TSerg Все от того, что Вы сразу не привели схему Вашей к... Mar 27 2017, 19:18 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:18) Все от... Mar 27 2017, 19:25 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:25) Упр... Mar 27 2017, 19:37 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:37) Не фак... Mar 27 2017, 19:45 TSerg Я, конечно, всех условий работы этой резательной м... Mar 27 2017, 19:50 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:50) Я, кон... Mar 27 2017, 19:59 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:59) Тол... Mar 27 2017, 20:06 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:06) Вы - с... Mar 27 2017, 20:15 TSerg Цитата(Daedal07 @ Mar 27 2017, 23:15) Нап... Mar 27 2017, 20:41 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:41) Регист... Mar 28 2017, 20:14 AlexandrY Цитата(Daedal07 @ Mar 28 2017, 23:14) Что... Mar 29 2017, 06:07 somebody111 ЦитатаПока знаю, что для того, чтобы рассчитать ко... Apr 3 2017, 17:12 Daedal07 Цитата(somebody111 @ Apr 3 2017, 20:12) Д... Apr 9 2017, 00:18 alexr22b Цитата(Daedal07 @ Apr 9 2017, 04:18) Это ... Apr 9 2017, 00:30 somebody111 ЦитатаInstaSPIN
Могу сказать даже больше - я его и... Apr 4 2017, 11:51 AlexandrY Цитата(somebody111 @ Apr 4 2017, 14:51) В... Apr 4 2017, 13:46 somebody111 ЦитатаInstaSPIN у TI идет без исходников, поэтому ... Apr 4 2017, 14:08 AlexandrY Цитата(somebody111 @ Apr 4 2017, 17:08) Н... Apr 4 2017, 14:36 somebody111 Мне хватило понимания того, что в заявленном там а... Apr 4 2017, 15:03 @Ark Цитата(Daedal07 @ Mar 27 2017, 12:07) По ... Apr 4 2017, 22:42 AlexandrY Цитата(@Ark @ Apr 5 2017, 01:42) Теперь п... Apr 5 2017, 06:15 @Ark Цитата(AlexandrY @ Apr 5 2017, 09:15) У T... Apr 5 2017, 07:51 Daedal07 Цитата(@Ark @ Apr 5 2017, 01:42) Очередно... Apr 9 2017, 01:22 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:22) Опят... Apr 9 2017, 01:33 Daedal07 Цитата(@Ark @ Apr 9 2017, 04:33) Вы опред... Apr 9 2017, 01:53 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:53) Эта ... Apr 9 2017, 02:24 Daedal07 Цитата(@Ark @ Apr 9 2017, 05:24) Ничего В... Apr 9 2017, 08:46 @Ark Вы почему-то упорно придерживаетесь своей первонач... Apr 9 2017, 10:35 Daedal07 Цитата(@Ark @ Apr 9 2017, 13:35) Видимо, ... Apr 9 2017, 11:16 @Ark Цитата(Daedal07 @ Apr 9 2017, 14:16) У ме... Apr 9 2017, 12:47 Daedal07 Цитата(@Ark @ Apr 9 2017, 15:47) То есть ... Apr 9 2017, 13:15 @Ark Цитата(Daedal07 @ Apr 9 2017, 16:15) Цита... Apr 9 2017, 15:39 Daedal07 Цитата(@Ark @ Apr 9 2017, 18:39) Сейчас т... Apr 9 2017, 15:48 AlexandrY Цитата(Daedal07 @ Apr 9 2017, 18:48) Сейч... Apr 9 2017, 17:59 Gruffly >и для разной длины картона
Так это картон?
Так... Apr 9 2017, 13:54 Daedal07 Цитата(Gruffly @ Apr 9 2017, 16:54) >и... Apr 9 2017, 13:55 Gruffly В энергетике процесса рубки/реза. Apr 9 2017, 14:04 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:04) В эне... Apr 9 2017, 14:07 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:07) Како... Apr 9 2017, 14:46 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:46) Прямо... Apr 9 2017, 14:59 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:59) Крас... Apr 9 2017, 15:16 Gruffly С Вашего позволения, еще несколько вопросов:
1. Дв... Apr 9 2017, 17:45 Daedal07 Цитата(Gruffly @ Apr 9 2017, 20:45) С Ваш... Apr 9 2017, 18:04 Gruffly Daedal07
Так, примерно понятно, но - уточнения.
... Apr 9 2017, 20:02 Daedal07 Цитата(Gruffly @ Apr 9 2017, 23:02) Т.е. ... Apr 9 2017, 20:19 @Ark Цитата(Gruffly @ Apr 9 2017, 23:02) Вся п... Apr 9 2017, 22:10 Daedal07 Цитата(@Ark @ Apr 10 2017, 01:10) Все это... Apr 9 2017, 22:22 Gruffly Цитата(@Ark @ Apr 9 2017, 23:10) Все это ... Apr 9 2017, 22:46 @Ark Цитата(Gruffly @ Apr 10 2017, 01:46) Чем ... Apr 9 2017, 23:08 Gruffly Цитата(@Ark @ Apr 10 2017, 00:08) Речь не... Apr 10 2017, 00:51 Gruffly Первые прикидки по вашей модели привода и САУ ... Apr 9 2017, 21:53 Daedal07 Цитата(Gruffly @ Apr 10 2017, 00:53) Перв... Apr 9 2017, 22:59
3 страниц  1 2 3 >
1 2 3 >
2 чел. читают эту тему (гостей: 2, скрытых пользователей: 0)
Пользователей: 0
|
|
|