| |
 Быстрый ПИД-регулятор Быстрый ПИД-регулятор, На отрезном станке. Новичёк просит помощи. |
|
|
|
|
  Mar 27 2017, 09:07 Mar 27 2017, 09:07
|
Местный

Группа: Свой
Сообщений: 287
Регистрация: 3-12-07
Из: г.Казань
Пользователь №: 32 913

|
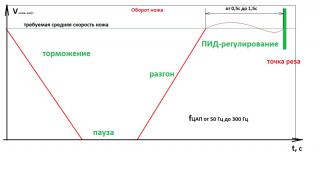
Добрый день! С ПИД-регуляторами ранее дела не имел, прошу помощи по теории и практике ПИД- регулирования. Во-первых, пожалуйста, подскажите хорошую книгу по дискретным ПИД-регуляторам, по тому, как составить модель объекта регулирования, как настроить коэффициенты регулятор. Во-вторых, подскажите по глупым вопросам конкретной системы с дискретным ПИД-регулятором. ПИД-регулятор управляет вращением ножей отрезного станка. По линии бежит полотно, его надо резать на листы определённой длины. На линии стоит энкодер, которым измеряется скорость линии. У ножа тоже стоит энкодер, по которому измеряется текущее положение ножа и скорость. Точка реза ножа определена, алгоритм повторяется после каждого реза с этой точки. Алгоритм работы контроллера, в состав которого входит ПИД-регулятор, показан на рисунке. Работа ножей состоит из четырёх этапов: торможение, пауза, разгон, коррекции средней скорости. На этапе коррекции должен работать ПИД-регулятор. Этап коррекции занимает, в среднем, от 0,5с до 1,5с. Я не знаю, много это или мало, но эту величину можно менять за счёт изменения времени паузы ножа. С теорией ПИД-регулирования у меня пока очень плохо. Пока знаю, что для того, чтобы рассчитать коэффициенты ПИД-регулятора, нужно составить модель объекта управления, т.е. ножа в моём случае. Как это сделать я не знаю. У меня есть возможность проводить измерения на реальном объекте и смотреть результаты регулировки на ПК в режиме реального времени, сохранять их и анализировать. Для реализации была выбрана следующую формулу дискретного регулятора: Код U(n)= Kp*e(n)+Ki*∑e(n) + Kd*[e(n)-e(n-1)] Ознакомился с двумя методами Циглера-Николса, но для них у меня не хватает знаний. Для одного метода я не знаю, как получить реакцию объекта управления на ступенчатое воздействие, по которому определяется параметры, участвующие в расчёте Kp, Ki, Kd. Для другого метода, по которому измеряются собственные колебания объекта, находящегося на границе устойчивости, у меня нет понимания, как эти колебания измерить, потому что нож находится в режиме ПИД-регулирования не всё время вращения, а только ближе к концу каждого оборота. Я смогу ввести нож в режим, когда он вращается с постоянной скоростью и всегда находится в режиме ПИД-регулирования. Далее, я переведу ПИД-регулятор в П-регулятор и получу колебания, измерю их период. Но у меня сомнения следующего рода: В реальности нож будет работать в другом режиме, т.е. на других скоростях и время на регулирование – это не время полного оборота, а половина, в лучшем случае. Подойдут ли полученные таким способом коэффициенты для реальной работы?
Эскизы прикрепленных изображений
--------------------
Сжимаются ужи насмешкой лжи
|
|
|
|
|
|
|
 |
Ответов
|
|
Apr 4 2017, 22:42
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(Daedal07 @ Mar 27 2017, 12:07)  По линии бежит полотно, его надо резать на листы определённой длины. На линии стоит энкодер, которым измеряется скорость линии.
У ножа тоже стоит энкодер, по которому измеряется текущее положение ножа и скорость.
Точка реза ножа определена, алгоритм повторяется после каждого реза с этой точки.
Алгоритм работы контроллера, в состав которого входит ПИД-регулятор, показан на рисунке.
Работа ножей состоит из четырёх этапов:
торможение, пауза, разгон, коррекции средней скорости.
На этапе коррекции должен работать ПИД-регулятор... Очередной раз убеждаюсь, что правильная постановка задачи - 90% ее решения. Сначала разбираемся с циклограммой работы вращающегося ножа: 1) Исходное состояние (пауза): неподвижный нож находится в верхнем положении. Оно точно определено и контролируется по энкодеру привода ножа. 2) Включение привода, разгон до некоторой скорости, движение с постоянной скоростью до момента резки, который, также, точно определяется по энкодеру привода ножа. 3) Отрезание полотна на заданной (постоянной) скорости ножа. 4) Плавное торможение и перевод системы в исходное состояние. В этой системе входным параметром будет задаваемая скорость ножа в момент резки. По данным ТС, скорость вращения линейно зависит от напряжения питания привода, поэтому ее можно задать напрямую таким способом. Нужно лишь учесть факт разгона при старте. Предполагаем, что задаваемая скорость достигается менее чем за пол-оборота,то есть к моменту резки нож всегда наберет заданную скорость. Выходным параметом данной системы (черного ящика) для нас будет время от момента подачи питания на привод в исходном состоянии, до момента, когда нож достигнет линии резки. Это время обозначим как "время срабатывания привода" Tp. Теперь разбираемся с полотном. Надо полагать, привод полотна имеет какую-то стабилизацию по скорости, поэтому, используя энкодер привода полотна, мы можем заблаговременно рассчитать, когда предполагаемая (желаемая) линия отреза точно подойдет к неподвижному ножу. Расчет этого времени можно начинать, когда останется несколько секунд (несколько метров) до резки. Когда это время станет равным Tp - включаем привод ножа. Через время Tp намеченная линия резки и вращающийся нож встретятся в нужном месте. Для достижения нужной точности требуется, хотя бы, кратковременная (порядка нескольких секунд) стабильность скорости движения полотна, для вычисления оставшегося времени с требуемой точностью. Будем считать, что это требование выполняется. Самое главное в этой задаче - обеспечить стабильность времени срабатывания привода Tp. Причем, как и в случае со скоростью полотна, достаточно лишь кратковременной, "локальной" стабильности этого параметра - то есть, это время Tp не должно отличаться для двух (нескольких) соседних отрезов, с достаточной точностью. Замечу, что Tp - это выходной параметр системы привода ножа, а не входной. Его не нужно "задавать" или подгонять к какому-либо предопределенному значению. Достаточно измерять и запоминать его фактическое значение, чтобы использовать для следующего цикла резки. То, что этот параметр будет медленно "плыть" по мере износа механики, изменения температуры и еще кучи всяких факторов - для решения задачи никакого значения не имеет. Важна лишь его "кратковременная" стабильность. Теперь практический совет для ТС: Исследуйте (измерьте) стабильность (повторяемость) "времени срабатывания привода" Tp вашего устройства в реальных условиях, при задании различных рабочих скоростей ножа. Далее, посчитайте, достаточно ли ее будет для достижения необходимой точности резки полотна (по описанному выше алгоритму работы). Если достаточно, то никакой дополнительный регулятор Вам не нужен. Если нет, то можно попробовать настроить штатный регулятор привода ножа. Или, наоборот, отключить его. Иногда, плохо настроенный регулятор только портит все дело. Если результат все же будет неудовлетворительный, то лишь тогда будете думать как заменить PID-регулятор двигателя привода, или как-то пристроить внешний. А для начала - нужно знать реальное положение вещей.
|
|
|
|
|
|
|
|
Apr 5 2017, 06:15
|

Ally
Группа: Модераторы
Сообщений: 6 232
Регистрация: 19-01-05
Пользователь №: 2 050
|
Цитата(@Ark @ Apr 5 2017, 01:42) Теперь практический совет для ТС:
Исследуйте (измерьте) стабильность (повторяемость) "времени срабатывания привода" Tp вашего устройства в реальных условиях, при задании различных рабочих скоростей ножа. У TC нет углового датчика на ноже, как он исследует? Да и наблюдаемую осцилляцию скорости он изобразил на рисунке. Значит частотник не справляется со стабилизацией. А "Самое главное в этой задаче - обеспечить стабильность времени срабатывания привода" можно добиться только уменьшением осцилляций скорости. Так что самое главное - скорость.
|
|
|
|
|
|
|
|
Apr 5 2017, 07:51
|
Знающий
Группа: Участник
Сообщений: 688
Регистрация: 13-05-16
Пользователь №: 91 710
|
Цитата(AlexandrY @ Apr 5 2017, 09:15) У TC нет углового датчика на ноже, как он исследует? Есть энкодер на валу двигателя. Пусть по нему ориентируется. Или ставит доп. энкодер непосредственно на барабан ножа. Иначе задача не имеет решения. Цитата(AlexandrY @ Apr 5 2017, 09:15) Да и наблюдаемую осцилляцию скорости он изобразил на рисунке. Значит частотник не справляется со стабилизацией. Поэтому, одно из решений - настроить штатный регулятор привода. Либо отключить его совсем... Цитата(AlexandrY @ Apr 5 2017, 09:15) А "Самое главное в этой задаче - обеспечить стабильность времени срабатывания привода" можно добиться только уменьшением осцилляций скорости.
Так что самое главное - скорость. Нет. Самое главное - стабильность "времени срабатывания". Стабилизация скорости - лишь одно из условий. Второе условие - стабилизация времени разгона от нуля до заданной скорости.
|
|
|
|
|
|
Сообщений в этой теме
 Daedal07 Быстрый ПИД-регулятор Mar 27 2017, 09:07 Daedal07 Быстрый ПИД-регулятор Mar 27 2017, 09:07 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 12:07) С П... Mar 27 2017, 12:34 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 12:07) С П... Mar 27 2017, 12:34 demiurg_spb Цитата(AlexandrY @ Mar 27 2017, 15:34) ка... Mar 27 2017, 14:22 demiurg_spb Цитата(AlexandrY @ Mar 27 2017, 15:34) ка... Mar 27 2017, 14:22 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 15:34) Эт... Mar 27 2017, 15:17 Tanya Цитата(Daedal07 @ Mar 27 2017, 18:17) Сле... Mar 27 2017, 16:09 Daedal07 Цитата(Tanya @ Mar 27 2017, 19:09) Вам ну... Mar 27 2017, 16:20 Tanya Цитата(Daedal07 @ Mar 27 2017, 19:20) Дай... Mar 27 2017, 18:12 TSerg Цитата(Tanya @ Mar 27 2017, 21:12) Мне во... Mar 27 2017, 18:25 Daedal07 Цитата(Tanya @ Mar 27 2017, 21:12) Ваша ф... Mar 27 2017, 18:26 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 18:17) Я п... Mar 27 2017, 20:31 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 27 2017, 21:13 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:13) Я у... Mar 27 2017, 21:45 Daedal07 Цитата(TSerg @ Mar 28 2017, 00:45) Не оби... Mar 27 2017, 21:54 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:54) Зав... Mar 27 2017, 22:11 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 29 2017, 06:29 Tanya Цитата(Daedal07 @ Mar 29 2017, 09:29) Меж... Mar 29 2017, 07:50 Daedal07 Цитата(Tanya @ Mar 29 2017, 10:50) Трудно... Mar 29 2017, 08:15 Tanya Цитата(Daedal07 @ Mar 29 2017, 11:15) Ящи... Mar 29 2017, 08:38 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 11:15) Спр... Mar 29 2017, 08:42 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 11:42) Чт... Mar 29 2017, 09:38 Tanya Цитата(Daedal07 @ Mar 29 2017, 12:38) Я х... Mar 29 2017, 09:50 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 12:38) Нет... Mar 29 2017, 10:11 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:11) Зн... Mar 29 2017, 10:27 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:27) Ящи... Mar 29 2017, 10:43 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:43) Та... Mar 29 2017, 10:49 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:49) Я н... Mar 29 2017, 10:52 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:52) Т.... Mar 30 2017, 10:03 Tanya Цитата(Daedal07 @ Mar 30 2017, 13:03) Но ... Mar 30 2017, 10:21 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 13:03) мне... Mar 30 2017, 11:19 Daedal07 Цитата(AlexandrY @ Mar 30 2017, 14:19) Да... Mar 30 2017, 11:51 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 14:51) Я, ... Mar 30 2017, 12:07 SSerge Цитата(AlexandrY @ Mar 30 2017, 19:07) От... Mar 30 2017, 13:43 Tanya Цитата(Daedal07 @ Mar 29 2017, 13:49) Пус... Mar 29 2017, 10:53 Daedal07 В контуре Привод - Двигатель обнаружился тахогенер... Mar 29 2017, 12:15 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:15) В к... Mar 29 2017, 12:23 Daedal07 Цитата(TSerg @ Mar 29 2017, 15:23) Тогда ... Mar 29 2017, 12:27 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:27) Поч... Mar 29 2017, 15:25 TSerg Это диплом? Mar 27 2017, 15:51 Daedal07 Цитата(TSerg @ Mar 27 2017, 18:51) Это ди... Mar 27 2017, 15:57 TSerg Цитата(Daedal07 @ Mar 27 2017, 18:57) Есл... Mar 27 2017, 16:43 Daedal07 Цитата(TSerg @ Mar 27 2017, 19:41) Безотв... Mar 27 2017, 16:47 TSerg Цитата(Daedal07 @ Mar 27 2017, 19:47) Спр... Mar 27 2017, 18:31 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:31) Таня В... Mar 27 2017, 18:48 TSerg Цитата(Daedal07 @ Mar 27 2017, 21:48) Как... Mar 27 2017, 18:56 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:56) Физика... Mar 27 2017, 19:09 TSerg Все от того, что Вы сразу не привели схему Вашей к... Mar 27 2017, 19:18 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:18) Все от... Mar 27 2017, 19:25 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:25) Упр... Mar 27 2017, 19:37 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:37) Не фак... Mar 27 2017, 19:45 TSerg Я, конечно, всех условий работы этой резательной м... Mar 27 2017, 19:50 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:50) Я, кон... Mar 27 2017, 19:59 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:59) Тол... Mar 27 2017, 20:06 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:06) Вы - с... Mar 27 2017, 20:15 TSerg Цитата(Daedal07 @ Mar 27 2017, 23:15) Нап... Mar 27 2017, 20:41 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:41) Регист... Mar 28 2017, 20:14 AlexandrY Цитата(Daedal07 @ Mar 28 2017, 23:14) Что... Mar 29 2017, 06:07 somebody111 ЦитатаПока знаю, что для того, чтобы рассчитать ко... Apr 3 2017, 17:12 Daedal07 Цитата(somebody111 @ Apr 3 2017, 20:12) Д... Apr 9 2017, 00:18 alexr22b Цитата(Daedal07 @ Apr 9 2017, 04:18) Это ... Apr 9 2017, 00:30 somebody111 Окай, давай учиться вместе. Настройка ПИД регулято... Apr 3 2017, 23:23 AlexandrY Цитата(somebody111 @ Apr 4 2017, 02:23) В... Apr 4 2017, 06:07 somebody111 ЦитатаInstaSPIN
Могу сказать даже больше - я его и... Apr 4 2017, 11:51 AlexandrY Цитата(somebody111 @ Apr 4 2017, 14:51) В... Apr 4 2017, 13:46 somebody111 ЦитатаInstaSPIN у TI идет без исходников, поэтому ... Apr 4 2017, 14:08 AlexandrY Цитата(somebody111 @ Apr 4 2017, 17:08) Н... Apr 4 2017, 14:36 somebody111 Мне хватило понимания того, что в заявленном там а... Apr 4 2017, 15:03 Daedal07 Цитата(@Ark @ Apr 5 2017, 01:42) Очередно... Apr 9 2017, 01:22 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:22) Опят... Apr 9 2017, 01:33 Daedal07 Цитата(@Ark @ Apr 9 2017, 04:33) Вы опред... Apr 9 2017, 01:53 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:53) Эта ... Apr 9 2017, 02:24 Daedal07 Цитата(@Ark @ Apr 9 2017, 05:24) Ничего В... Apr 9 2017, 08:46 @Ark Вы почему-то упорно придерживаетесь своей первонач... Apr 9 2017, 10:35 Daedal07 Цитата(@Ark @ Apr 9 2017, 13:35) Видимо, ... Apr 9 2017, 11:16 @Ark Цитата(Daedal07 @ Apr 9 2017, 14:16) У ме... Apr 9 2017, 12:47 Daedal07 Цитата(@Ark @ Apr 9 2017, 15:47) То есть ... Apr 9 2017, 13:15 @Ark Цитата(Daedal07 @ Apr 9 2017, 16:15) Цита... Apr 9 2017, 15:39 Daedal07 Цитата(@Ark @ Apr 9 2017, 18:39) Сейчас т... Apr 9 2017, 15:48 AlexandrY Цитата(Daedal07 @ Apr 9 2017, 18:48) Сейч... Apr 9 2017, 17:59 Gruffly >и для разной длины картона
Так это картон?
Так... Apr 9 2017, 13:54 Daedal07 Цитата(Gruffly @ Apr 9 2017, 16:54) >и... Apr 9 2017, 13:55 Gruffly В энергетике процесса рубки/реза. Apr 9 2017, 14:04 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:04) В эне... Apr 9 2017, 14:07 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:07) Како... Apr 9 2017, 14:46 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:46) Прямо... Apr 9 2017, 14:59 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:59) Крас... Apr 9 2017, 15:16 Gruffly С Вашего позволения, еще несколько вопросов:
1. Дв... Apr 9 2017, 17:45 Daedal07 Цитата(Gruffly @ Apr 9 2017, 20:45) С Ваш... Apr 9 2017, 18:04 Gruffly Daedal07
Так, примерно понятно, но - уточнения.
... Apr 9 2017, 20:02 Daedal07 Цитата(Gruffly @ Apr 9 2017, 23:02) Т.е. ... Apr 9 2017, 20:19 @Ark Цитата(Gruffly @ Apr 9 2017, 23:02) Вся п... Apr 9 2017, 22:10 Daedal07 Цитата(@Ark @ Apr 10 2017, 01:10) Все это... Apr 9 2017, 22:22 Gruffly Цитата(@Ark @ Apr 9 2017, 23:10) Все это ... Apr 9 2017, 22:46 @Ark Цитата(Gruffly @ Apr 10 2017, 01:46) Чем ... Apr 9 2017, 23:08 Gruffly Цитата(@Ark @ Apr 10 2017, 00:08) Речь не... Apr 10 2017, 00:51 Gruffly Первые прикидки по вашей модели привода и САУ ... Apr 9 2017, 21:53 Daedal07 Цитата(Gruffly @ Apr 10 2017, 00:53) Перв... Apr 9 2017, 22:59 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 15:34) Эт... Mar 27 2017, 15:17 Tanya Цитата(Daedal07 @ Mar 27 2017, 18:17) Сле... Mar 27 2017, 16:09 Daedal07 Цитата(Tanya @ Mar 27 2017, 19:09) Вам ну... Mar 27 2017, 16:20 Tanya Цитата(Daedal07 @ Mar 27 2017, 19:20) Дай... Mar 27 2017, 18:12 TSerg Цитата(Tanya @ Mar 27 2017, 21:12) Мне во... Mar 27 2017, 18:25 Daedal07 Цитата(Tanya @ Mar 27 2017, 21:12) Ваша ф... Mar 27 2017, 18:26 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 18:17) Я п... Mar 27 2017, 20:31 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 27 2017, 21:13 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:13) Я у... Mar 27 2017, 21:45 Daedal07 Цитата(TSerg @ Mar 28 2017, 00:45) Не оби... Mar 27 2017, 21:54 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:54) Зав... Mar 27 2017, 22:11 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 29 2017, 06:29 Tanya Цитата(Daedal07 @ Mar 29 2017, 09:29) Меж... Mar 29 2017, 07:50 Daedal07 Цитата(Tanya @ Mar 29 2017, 10:50) Трудно... Mar 29 2017, 08:15 Tanya Цитата(Daedal07 @ Mar 29 2017, 11:15) Ящи... Mar 29 2017, 08:38 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 11:15) Спр... Mar 29 2017, 08:42 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 11:42) Чт... Mar 29 2017, 09:38 Tanya Цитата(Daedal07 @ Mar 29 2017, 12:38) Я х... Mar 29 2017, 09:50 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 12:38) Нет... Mar 29 2017, 10:11 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:11) Зн... Mar 29 2017, 10:27 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:27) Ящи... Mar 29 2017, 10:43 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:43) Та... Mar 29 2017, 10:49 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:49) Я н... Mar 29 2017, 10:52 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:52) Т.... Mar 30 2017, 10:03 Tanya Цитата(Daedal07 @ Mar 30 2017, 13:03) Но ... Mar 30 2017, 10:21 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 13:03) мне... Mar 30 2017, 11:19 Daedal07 Цитата(AlexandrY @ Mar 30 2017, 14:19) Да... Mar 30 2017, 11:51 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 14:51) Я, ... Mar 30 2017, 12:07 SSerge Цитата(AlexandrY @ Mar 30 2017, 19:07) От... Mar 30 2017, 13:43 Tanya Цитата(Daedal07 @ Mar 29 2017, 13:49) Пус... Mar 29 2017, 10:53 Daedal07 В контуре Привод - Двигатель обнаружился тахогенер... Mar 29 2017, 12:15 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:15) В к... Mar 29 2017, 12:23 Daedal07 Цитата(TSerg @ Mar 29 2017, 15:23) Тогда ... Mar 29 2017, 12:27 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:27) Поч... Mar 29 2017, 15:25 TSerg Это диплом? Mar 27 2017, 15:51 Daedal07 Цитата(TSerg @ Mar 27 2017, 18:51) Это ди... Mar 27 2017, 15:57 TSerg Цитата(Daedal07 @ Mar 27 2017, 18:57) Есл... Mar 27 2017, 16:43 Daedal07 Цитата(TSerg @ Mar 27 2017, 19:41) Безотв... Mar 27 2017, 16:47 TSerg Цитата(Daedal07 @ Mar 27 2017, 19:47) Спр... Mar 27 2017, 18:31 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:31) Таня В... Mar 27 2017, 18:48 TSerg Цитата(Daedal07 @ Mar 27 2017, 21:48) Как... Mar 27 2017, 18:56 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:56) Физика... Mar 27 2017, 19:09 TSerg Все от того, что Вы сразу не привели схему Вашей к... Mar 27 2017, 19:18 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:18) Все от... Mar 27 2017, 19:25 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:25) Упр... Mar 27 2017, 19:37 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:37) Не фак... Mar 27 2017, 19:45 TSerg Я, конечно, всех условий работы этой резательной м... Mar 27 2017, 19:50 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:50) Я, кон... Mar 27 2017, 19:59 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:59) Тол... Mar 27 2017, 20:06 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:06) Вы - с... Mar 27 2017, 20:15 TSerg Цитата(Daedal07 @ Mar 27 2017, 23:15) Нап... Mar 27 2017, 20:41 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:41) Регист... Mar 28 2017, 20:14 AlexandrY Цитата(Daedal07 @ Mar 28 2017, 23:14) Что... Mar 29 2017, 06:07 somebody111 ЦитатаПока знаю, что для того, чтобы рассчитать ко... Apr 3 2017, 17:12 Daedal07 Цитата(somebody111 @ Apr 3 2017, 20:12) Д... Apr 9 2017, 00:18 alexr22b Цитата(Daedal07 @ Apr 9 2017, 04:18) Это ... Apr 9 2017, 00:30 somebody111 Окай, давай учиться вместе. Настройка ПИД регулято... Apr 3 2017, 23:23 AlexandrY Цитата(somebody111 @ Apr 4 2017, 02:23) В... Apr 4 2017, 06:07 somebody111 ЦитатаInstaSPIN
Могу сказать даже больше - я его и... Apr 4 2017, 11:51 AlexandrY Цитата(somebody111 @ Apr 4 2017, 14:51) В... Apr 4 2017, 13:46 somebody111 ЦитатаInstaSPIN у TI идет без исходников, поэтому ... Apr 4 2017, 14:08 AlexandrY Цитата(somebody111 @ Apr 4 2017, 17:08) Н... Apr 4 2017, 14:36 somebody111 Мне хватило понимания того, что в заявленном там а... Apr 4 2017, 15:03 Daedal07 Цитата(@Ark @ Apr 5 2017, 01:42) Очередно... Apr 9 2017, 01:22 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:22) Опят... Apr 9 2017, 01:33 Daedal07 Цитата(@Ark @ Apr 9 2017, 04:33) Вы опред... Apr 9 2017, 01:53 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:53) Эта ... Apr 9 2017, 02:24 Daedal07 Цитата(@Ark @ Apr 9 2017, 05:24) Ничего В... Apr 9 2017, 08:46 @Ark Вы почему-то упорно придерживаетесь своей первонач... Apr 9 2017, 10:35 Daedal07 Цитата(@Ark @ Apr 9 2017, 13:35) Видимо, ... Apr 9 2017, 11:16 @Ark Цитата(Daedal07 @ Apr 9 2017, 14:16) У ме... Apr 9 2017, 12:47 Daedal07 Цитата(@Ark @ Apr 9 2017, 15:47) То есть ... Apr 9 2017, 13:15 @Ark Цитата(Daedal07 @ Apr 9 2017, 16:15) Цита... Apr 9 2017, 15:39 Daedal07 Цитата(@Ark @ Apr 9 2017, 18:39) Сейчас т... Apr 9 2017, 15:48 AlexandrY Цитата(Daedal07 @ Apr 9 2017, 18:48) Сейч... Apr 9 2017, 17:59 Gruffly >и для разной длины картона
Так это картон?
Так... Apr 9 2017, 13:54 Daedal07 Цитата(Gruffly @ Apr 9 2017, 16:54) >и... Apr 9 2017, 13:55 Gruffly В энергетике процесса рубки/реза. Apr 9 2017, 14:04 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:04) В эне... Apr 9 2017, 14:07 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:07) Како... Apr 9 2017, 14:46 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:46) Прямо... Apr 9 2017, 14:59 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:59) Крас... Apr 9 2017, 15:16 Gruffly С Вашего позволения, еще несколько вопросов:
1. Дв... Apr 9 2017, 17:45 Daedal07 Цитата(Gruffly @ Apr 9 2017, 20:45) С Ваш... Apr 9 2017, 18:04 Gruffly Daedal07
Так, примерно понятно, но - уточнения.
... Apr 9 2017, 20:02 Daedal07 Цитата(Gruffly @ Apr 9 2017, 23:02) Т.е. ... Apr 9 2017, 20:19 @Ark Цитата(Gruffly @ Apr 9 2017, 23:02) Вся п... Apr 9 2017, 22:10 Daedal07 Цитата(@Ark @ Apr 10 2017, 01:10) Все это... Apr 9 2017, 22:22 Gruffly Цитата(@Ark @ Apr 9 2017, 23:10) Все это ... Apr 9 2017, 22:46 @Ark Цитата(Gruffly @ Apr 10 2017, 01:46) Чем ... Apr 9 2017, 23:08 Gruffly Цитата(@Ark @ Apr 10 2017, 00:08) Речь не... Apr 10 2017, 00:51 Gruffly Первые прикидки по вашей модели привода и САУ ... Apr 9 2017, 21:53 Daedal07 Цитата(Gruffly @ Apr 10 2017, 00:53) Перв... Apr 9 2017, 22:59
3 страниц  1 2 3 >
1 2 3 >
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|