| |
 Быстрый ПИД-регулятор Быстрый ПИД-регулятор, На отрезном станке. Новичёк просит помощи. |
|
|
|
|
  Mar 27 2017, 09:07 Mar 27 2017, 09:07
|
Местный

Группа: Свой
Сообщений: 287
Регистрация: 3-12-07
Из: г.Казань
Пользователь №: 32 913

|
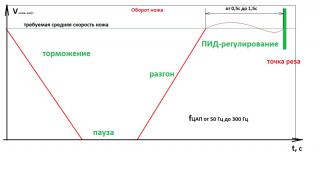
Добрый день! С ПИД-регуляторами ранее дела не имел, прошу помощи по теории и практике ПИД- регулирования. Во-первых, пожалуйста, подскажите хорошую книгу по дискретным ПИД-регуляторам, по тому, как составить модель объекта регулирования, как настроить коэффициенты регулятор. Во-вторых, подскажите по глупым вопросам конкретной системы с дискретным ПИД-регулятором. ПИД-регулятор управляет вращением ножей отрезного станка. По линии бежит полотно, его надо резать на листы определённой длины. На линии стоит энкодер, которым измеряется скорость линии. У ножа тоже стоит энкодер, по которому измеряется текущее положение ножа и скорость. Точка реза ножа определена, алгоритм повторяется после каждого реза с этой точки. Алгоритм работы контроллера, в состав которого входит ПИД-регулятор, показан на рисунке. Работа ножей состоит из четырёх этапов: торможение, пауза, разгон, коррекции средней скорости. На этапе коррекции должен работать ПИД-регулятор. Этап коррекции занимает, в среднем, от 0,5с до 1,5с. Я не знаю, много это или мало, но эту величину можно менять за счёт изменения времени паузы ножа. С теорией ПИД-регулирования у меня пока очень плохо. Пока знаю, что для того, чтобы рассчитать коэффициенты ПИД-регулятора, нужно составить модель объекта управления, т.е. ножа в моём случае. Как это сделать я не знаю. У меня есть возможность проводить измерения на реальном объекте и смотреть результаты регулировки на ПК в режиме реального времени, сохранять их и анализировать. Для реализации была выбрана следующую формулу дискретного регулятора: Код U(n)= Kp*e(n)+Ki*∑e(n) + Kd*[e(n)-e(n-1)] Ознакомился с двумя методами Циглера-Николса, но для них у меня не хватает знаний. Для одного метода я не знаю, как получить реакцию объекта управления на ступенчатое воздействие, по которому определяется параметры, участвующие в расчёте Kp, Ki, Kd. Для другого метода, по которому измеряются собственные колебания объекта, находящегося на границе устойчивости, у меня нет понимания, как эти колебания измерить, потому что нож находится в режиме ПИД-регулирования не всё время вращения, а только ближе к концу каждого оборота. Я смогу ввести нож в режим, когда он вращается с постоянной скоростью и всегда находится в режиме ПИД-регулирования. Далее, я переведу ПИД-регулятор в П-регулятор и получу колебания, измерю их период. Но у меня сомнения следующего рода: В реальности нож будет работать в другом режиме, т.е. на других скоростях и время на регулирование – это не время полного оборота, а половина, в лучшем случае. Подойдут ли полученные таким способом коэффициенты для реальной работы?
Эскизы прикрепленных изображений
--------------------
Сжимаются ужи насмешкой лжи
|
|
|
|
|
|
|
 |
Ответов
|
|
Apr 3 2017, 17:12
|
Частый гость
Группа: Участник
Сообщений: 190
Регистрация: 2-03-11
Пользователь №: 63 341
|
Цитата Пока знаю, что для того, чтобы рассчитать коэффициенты ПИД-регулятора, нужно составить модель объекта управления, т.е. ножа в моём случае. Как это сделать я не знаю. Никто никогда в здравом уме и светлой памяти не высчитывает параметры П, И, Д. Они подбираются на глаз из облачных соображений типа "постоянная времени регулятора должна компенсировать наибольшую постоянную времени объекта...мм...сколько она....ну начнем с 0.1 секунды" и понеслась...Начинают ,как правило с П-регулятора с отключенными И,Д составляющими. Когда видно, что дальше не получается - берут И. Д составляющую в чистом виде активируют крайне редко, когда объект управления оооочень медленный и представляет из себя фнч с малой частотой среза, иначе все это дело не зафильтровать. --- Теперь о системе управления. Я немного не понял, что является входным заданием для черного ящика? Если ток, то нужен ПИ(Д) регулятор. Если скорость, то надо обязательно разобраться, каким образом организован контур скорости в этом ящике. Если там настраиваемый ПИ(Д) - без проблем: ставите коэффициент усиления 1, обрываете о.с. по скорости и заводите её на свой ПИ(Д). Если там ПИ(Д) не настраиваемый, то задача решения не имеет ,потому что будет работа двух параллельно контуров скорости. Настроить можно, но ничего интересного не получится - нельзя служить двух господинам --- Это что касается электропривода. Но это не все - есть еще механика. Какая необходима точность поддержания скорости, раз вы захотели ПИ, а не П?Вы должны понимать, что если вас просят сделать ПИ, то нужна точность поддержания скорости и какая глубина регулирования, иначе надо делать П. А вот этот вопрос самый вкусный - заказчик обычно говорит "максимально точно", при этом в редукторах там люфты, в которые влезают пол кулака... Все, что нужно вам сделать: 1. Определиться, что является входом ящика и его пределы. Скажем, +5В - это 1000 об/мин, -5В - это -1000 об/мин 2. Определиться, что в главном контуре черного ящика - это регулятор напряжения, регулятор скорости или регулятор тока. Если регулятор напряжения или скорости - их надо отключить (оборвать о.с., превратить регулятор в П с коэффициентом передачи 1). Если там только регулятор тока, то вы должны из вне построить регулятор скорости (П,ПИ, ПИД) и предусмотреть, что их придется подбирать - во всем мире это называется наладкой. У вашего регулятора будет задание скорости. Перед задание скорости поставьте задатчик интенсивности, хотя бы 0.1 сек, чтобы не убить редуктор ударами за месяц. Кстати, о какой мощности идет речь? 3. А вот все научные измерения типо переходная или импульсная характеристика оставьте профессуре - они это очень любят. Дело в том, характер этих кривых больше всего определяется параметрами двигателя, которые плывут от температуры, параметрами механики - это люфт и приведенный момент инерции и точностью датчика скорости. А последнее определяется двумя факторами - это параметрами тахогенератора (я так понял у вас именно тг) и схемотехникой, которую вы будете делать, чтобы это дело как-то отфильтровать, а это еще одна постоянная времени. В системе слишком много неизмеряемых параметров (померьте сопротивление якоря и запишите видео,что получилось) или электромеханическую постоянную (всего-то надо магнитный поток измерить) или момент инерции Цитата Но ящик это жестко нелинейный элемент с задержкой. Если это промышленный электропривод с заданием по току, то простой интегратор с насыщением, если это промышленный электропривод с заданием по скорости - апериодическое звено. Любой двигатель в первом приближении - апериодическое звено, любая система управления двигателем в 1 приближении - тоже апериодическое звено. Других вариантов не бывает - если колебательное, то он начнет механику убивать, если консервативное, то он неуправляемый. Если его все таки сделали нелинейным, то массово его никто покупать не будет - вы купите электропривод, в котором 1235 настроек для регуляторов и для этого надо сначало докторскую защитить? К нашему большому несчастью в теории управления за 50 лет так и не придумали общих методов проектирования нелинейных систем с обратной связью
Сообщение отредактировал somebody111 - Apr 3 2017, 17:47
|
|
|
|
|
|
|
|
Apr 9 2017, 00:18
|
Местный
Группа: Свой
Сообщений: 287
Регистрация: 3-12-07
Из: г.Казань
Пользователь №: 32 913
|
Цитата(somebody111 @ Apr 3 2017, 20:12)  Д составляющую в чистом виде активируют крайне редко, когда объект управления оооочень медленный и представляет из себя фнч с малой частотой среза, иначе все это дело не зафильтровать. Это я уже узнал. Тем более, что у меня уставка, к которой нужно регулировать, может меняться. А Д-составляющая на это плохо реагирует. Так что, ПИ-регулятор, а не ПИД, скорее всего. Цитата(somebody111 @ Apr 3 2017, 20:12) Я немного не понял, что является входным заданием для черного ящика? Если ток, то нужен ПИ(Д) регулятор. Если скорость, то надо обязательно разобраться, каким образом организован контур скорости в этом ящике. Если там настраиваемый ПИ(Д) - без проблем: ставите коэффициент усиления 1, обрываете о.с. по скорости и заводите её на свой ПИ(Д). Входным заданием является напряжение. Оно линейно связано со скоростью : 1В - 20 м/мин. Там настраиваемый ПИД. Коэффициенты пока строгать боюсь, т.к. станок работает и ковыряться особо не дают. Но, конечно, отключить ПИД и убрать сигнал тахогенератора - это логично и это я буду делать, если не разберусь со следующим: Цитата(somebody111 @ Apr 3 2017, 20:12) Если там ПИ(Д) не настраиваемый, то задача решения не имеет ,потому что будет работа двух параллельно контуров скорости. Настроить можно, но ничего интересного не получится - нельзя служить двух господинам Сейчас стоит контроллер и он режет как надо. Как в этом случае работают оба регулятора? Это для меня загадка. Как, в принципе, учитывается влияние одного регулятора на другой, если известны коэффициенты того, который находится в приводе? Цитата(somebody111 @ Apr 3 2017, 20:12) Какая необходима точность поддержания скорости, раз вы захотели ПИ, а не П?Вы должны понимать, что если вас просят сделать ПИ, то нужна точность поддержания скорости и какая глубина регулирования, иначе надо делать П. А вот этот вопрос самый вкусный - заказчик обычно говорит "максимально точно", при этом в редукторах там люфты, в которые влезают пол кулака... Не знаю, но требуемая точность реза - 1 мм. И он сейчас достигается на установленном оборудовании. Цитата(somebody111 @ Apr 3 2017, 20:12) Все, что нужно вам сделать:
1. Определиться, что является входом ящика и его пределы. Скажем, +5В - это 1000 об/мин, -5В - это -1000 об/мин +1В - + 20 м/мин. Предел 80 м/мин. Цитата(somebody111 @ Apr 3 2017, 20:12) 2. Определиться, что в главном контуре черного ящика - это регулятор напряжения, регулятор скорости или регулятор тока. Если регулятор напряжения или скорости - их надо отключить (оборвать о.с., превратить регулятор в П с коэффициентом передачи 1). Если там только регулятор тока, то вы должны из вне построить регулятор скорости (П,ПИ, ПИД) и предусмотреть, что их придется подбирать - во всем мире это называется наладкой. У вашего регулятора будет задание скорости. Перед задание скорости поставьте задатчик интенсивности, хотя бы 0.1 сек, чтобы не убить редуктор ударами за месяц. Кстати, о какой мощности идет речь? Какой именно регулятор- я не понимаю, как это определить. Регулятор в приводе, сигналом ОС является сигнал с тахогенератора нужен для поддержания скорости. Задатчик интенсивности - это частота регулировки или что-то другое? Сейчас я ограничиваюсь 100 Гц, но параметр я могу менять из интерфейса ПО, которое написал для отладки. Мощность двигателя - 22 кВт. Цитата(somebody111 @ Apr 3 2017, 20:12) 3. А вот все научные измерения типо переходная или импульсная характеристика оставьте профессуре - они это очень любят. Дело в том, характер этих кривых больше всего определяется параметрами двигателя, которые плывут от температуры, параметрами механики - это люфт и приведенный момент инерции и точностью датчика скорости. А последнее определяется двумя факторами - это параметрами тахогенератора (я так понял у вас именно тг) и схемотехникой, которую вы будете делать, чтобы это дело как-то отфильтровать, а это еще одна постоянная времени. В системе слишком много неизмеряемых параметров (померьте сопротивление якоря и запишите видео,что получилось) или электромеханическую постоянную (всего-то надо магнитный поток измерить) или момент инерции
Если это промышленный электропривод с заданием по току, то простой интегратор с насыщением, если это промышленный электропривод с заданием по скорости - апериодическое звено. Любой двигатель в первом приближении - апериодическое звено, любая система управления двигателем в 1 приближении - тоже апериодическое звено. Других вариантов не бывает - если колебательное, то он начнет механику убивать, если консервативное, то он неуправляемый. Если его все таки сделали нелинейным, то массово его никто покупать не будет - вы купите электропривод, в котором 1235 настроек для регуляторов и для этого надо сначало докторскую защитить? К нашему большому несчастью в теории управления за 50 лет так и не придумали общих методов проектирования нелинейных систем с обратной связью Привод: DC integrator 590+. Даташит весит > 10 МБ, не могу прикрепить здесь. Цитата(somebody111 @ Apr 4 2017, 14:51) ... У ТСа задача - сделать, а не доказывать оптимальность управления вертелкой. Я вообще не понимаю, зачем ПИД для этой задачи. П-регулятора здесь достаточно Обязательно попробую, спасибо.
--------------------
Сжимаются ужи насмешкой лжи
|
|
|
|
|
|
Сообщений в этой теме
 Daedal07 Быстрый ПИД-регулятор Mar 27 2017, 09:07 Daedal07 Быстрый ПИД-регулятор Mar 27 2017, 09:07 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 12:07) С П... Mar 27 2017, 12:34 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 12:07) С П... Mar 27 2017, 12:34 demiurg_spb Цитата(AlexandrY @ Mar 27 2017, 15:34) ка... Mar 27 2017, 14:22 demiurg_spb Цитата(AlexandrY @ Mar 27 2017, 15:34) ка... Mar 27 2017, 14:22 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 15:34) Эт... Mar 27 2017, 15:17 Tanya Цитата(Daedal07 @ Mar 27 2017, 18:17) Сле... Mar 27 2017, 16:09 Daedal07 Цитата(Tanya @ Mar 27 2017, 19:09) Вам ну... Mar 27 2017, 16:20 Tanya Цитата(Daedal07 @ Mar 27 2017, 19:20) Дай... Mar 27 2017, 18:12 TSerg Цитата(Tanya @ Mar 27 2017, 21:12) Мне во... Mar 27 2017, 18:25 Daedal07 Цитата(Tanya @ Mar 27 2017, 21:12) Ваша ф... Mar 27 2017, 18:26 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 18:17) Я п... Mar 27 2017, 20:31 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 27 2017, 21:13 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:13) Я у... Mar 27 2017, 21:45 Daedal07 Цитата(TSerg @ Mar 28 2017, 00:45) Не оби... Mar 27 2017, 21:54 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:54) Зав... Mar 27 2017, 22:11 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 29 2017, 06:29 Tanya Цитата(Daedal07 @ Mar 29 2017, 09:29) Меж... Mar 29 2017, 07:50 Daedal07 Цитата(Tanya @ Mar 29 2017, 10:50) Трудно... Mar 29 2017, 08:15 Tanya Цитата(Daedal07 @ Mar 29 2017, 11:15) Ящи... Mar 29 2017, 08:38 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 11:15) Спр... Mar 29 2017, 08:42 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 11:42) Чт... Mar 29 2017, 09:38 Tanya Цитата(Daedal07 @ Mar 29 2017, 12:38) Я х... Mar 29 2017, 09:50 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 12:38) Нет... Mar 29 2017, 10:11 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:11) Зн... Mar 29 2017, 10:27 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:27) Ящи... Mar 29 2017, 10:43 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:43) Та... Mar 29 2017, 10:49 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:49) Я н... Mar 29 2017, 10:52 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:52) Т.... Mar 30 2017, 10:03 Tanya Цитата(Daedal07 @ Mar 30 2017, 13:03) Но ... Mar 30 2017, 10:21 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 13:03) мне... Mar 30 2017, 11:19 Daedal07 Цитата(AlexandrY @ Mar 30 2017, 14:19) Да... Mar 30 2017, 11:51 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 14:51) Я, ... Mar 30 2017, 12:07 SSerge Цитата(AlexandrY @ Mar 30 2017, 19:07) От... Mar 30 2017, 13:43 Tanya Цитата(Daedal07 @ Mar 29 2017, 13:49) Пус... Mar 29 2017, 10:53 Daedal07 В контуре Привод - Двигатель обнаружился тахогенер... Mar 29 2017, 12:15 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:15) В к... Mar 29 2017, 12:23 Daedal07 Цитата(TSerg @ Mar 29 2017, 15:23) Тогда ... Mar 29 2017, 12:27 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:27) Поч... Mar 29 2017, 15:25 TSerg Это диплом? Mar 27 2017, 15:51 Daedal07 Цитата(TSerg @ Mar 27 2017, 18:51) Это ди... Mar 27 2017, 15:57 TSerg Цитата(Daedal07 @ Mar 27 2017, 18:57) Есл... Mar 27 2017, 16:43 Daedal07 Цитата(TSerg @ Mar 27 2017, 19:41) Безотв... Mar 27 2017, 16:47 TSerg Цитата(Daedal07 @ Mar 27 2017, 19:47) Спр... Mar 27 2017, 18:31 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:31) Таня В... Mar 27 2017, 18:48 TSerg Цитата(Daedal07 @ Mar 27 2017, 21:48) Как... Mar 27 2017, 18:56 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:56) Физика... Mar 27 2017, 19:09 TSerg Все от того, что Вы сразу не привели схему Вашей к... Mar 27 2017, 19:18 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:18) Все от... Mar 27 2017, 19:25 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:25) Упр... Mar 27 2017, 19:37 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:37) Не фак... Mar 27 2017, 19:45 TSerg Я, конечно, всех условий работы этой резательной м... Mar 27 2017, 19:50 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:50) Я, кон... Mar 27 2017, 19:59 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:59) Тол... Mar 27 2017, 20:06 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:06) Вы - с... Mar 27 2017, 20:15 TSerg Цитата(Daedal07 @ Mar 27 2017, 23:15) Нап... Mar 27 2017, 20:41 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:41) Регист... Mar 28 2017, 20:14 AlexandrY Цитата(Daedal07 @ Mar 28 2017, 23:14) Что... Mar 29 2017, 06:07 alexr22b Цитата(Daedal07 @ Apr 9 2017, 04:18) Это ... Apr 9 2017, 00:30 somebody111 Окай, давай учиться вместе. Настройка ПИД регулято... Apr 3 2017, 23:23 AlexandrY Цитата(somebody111 @ Apr 4 2017, 02:23) В... Apr 4 2017, 06:07 somebody111 ЦитатаInstaSPIN
Могу сказать даже больше - я его и... Apr 4 2017, 11:51 AlexandrY Цитата(somebody111 @ Apr 4 2017, 14:51) В... Apr 4 2017, 13:46 somebody111 ЦитатаInstaSPIN у TI идет без исходников, поэтому ... Apr 4 2017, 14:08 AlexandrY Цитата(somebody111 @ Apr 4 2017, 17:08) Н... Apr 4 2017, 14:36 somebody111 Мне хватило понимания того, что в заявленном там а... Apr 4 2017, 15:03 @Ark Цитата(Daedal07 @ Mar 27 2017, 12:07) По ... Apr 4 2017, 22:42 AlexandrY Цитата(@Ark @ Apr 5 2017, 01:42) Теперь п... Apr 5 2017, 06:15 @Ark Цитата(AlexandrY @ Apr 5 2017, 09:15) У T... Apr 5 2017, 07:51 Daedal07 Цитата(@Ark @ Apr 5 2017, 01:42) Очередно... Apr 9 2017, 01:22 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:22) Опят... Apr 9 2017, 01:33 Daedal07 Цитата(@Ark @ Apr 9 2017, 04:33) Вы опред... Apr 9 2017, 01:53 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:53) Эта ... Apr 9 2017, 02:24 Daedal07 Цитата(@Ark @ Apr 9 2017, 05:24) Ничего В... Apr 9 2017, 08:46 @Ark Вы почему-то упорно придерживаетесь своей первонач... Apr 9 2017, 10:35 Daedal07 Цитата(@Ark @ Apr 9 2017, 13:35) Видимо, ... Apr 9 2017, 11:16 @Ark Цитата(Daedal07 @ Apr 9 2017, 14:16) У ме... Apr 9 2017, 12:47 Daedal07 Цитата(@Ark @ Apr 9 2017, 15:47) То есть ... Apr 9 2017, 13:15 @Ark Цитата(Daedal07 @ Apr 9 2017, 16:15) Цита... Apr 9 2017, 15:39 Daedal07 Цитата(@Ark @ Apr 9 2017, 18:39) Сейчас т... Apr 9 2017, 15:48 AlexandrY Цитата(Daedal07 @ Apr 9 2017, 18:48) Сейч... Apr 9 2017, 17:59 Gruffly >и для разной длины картона
Так это картон?
Так... Apr 9 2017, 13:54 Daedal07 Цитата(Gruffly @ Apr 9 2017, 16:54) >и... Apr 9 2017, 13:55 Gruffly В энергетике процесса рубки/реза. Apr 9 2017, 14:04 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:04) В эне... Apr 9 2017, 14:07 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:07) Како... Apr 9 2017, 14:46 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:46) Прямо... Apr 9 2017, 14:59 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:59) Крас... Apr 9 2017, 15:16 Gruffly С Вашего позволения, еще несколько вопросов:
1. Дв... Apr 9 2017, 17:45 Daedal07 Цитата(Gruffly @ Apr 9 2017, 20:45) С Ваш... Apr 9 2017, 18:04 Gruffly Daedal07
Так, примерно понятно, но - уточнения.
... Apr 9 2017, 20:02 Daedal07 Цитата(Gruffly @ Apr 9 2017, 23:02) Т.е. ... Apr 9 2017, 20:19 @Ark Цитата(Gruffly @ Apr 9 2017, 23:02) Вся п... Apr 9 2017, 22:10 Daedal07 Цитата(@Ark @ Apr 10 2017, 01:10) Все это... Apr 9 2017, 22:22 Gruffly Цитата(@Ark @ Apr 9 2017, 23:10) Все это ... Apr 9 2017, 22:46 @Ark Цитата(Gruffly @ Apr 10 2017, 01:46) Чем ... Apr 9 2017, 23:08 Gruffly Цитата(@Ark @ Apr 10 2017, 00:08) Речь не... Apr 10 2017, 00:51 Gruffly Первые прикидки по вашей модели привода и САУ ... Apr 9 2017, 21:53 Daedal07 Цитата(Gruffly @ Apr 10 2017, 00:53) Перв... Apr 9 2017, 22:59 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 15:34) Эт... Mar 27 2017, 15:17 Tanya Цитата(Daedal07 @ Mar 27 2017, 18:17) Сле... Mar 27 2017, 16:09 Daedal07 Цитата(Tanya @ Mar 27 2017, 19:09) Вам ну... Mar 27 2017, 16:20 Tanya Цитата(Daedal07 @ Mar 27 2017, 19:20) Дай... Mar 27 2017, 18:12 TSerg Цитата(Tanya @ Mar 27 2017, 21:12) Мне во... Mar 27 2017, 18:25 Daedal07 Цитата(Tanya @ Mar 27 2017, 21:12) Ваша ф... Mar 27 2017, 18:26 AlexandrY Цитата(Daedal07 @ Mar 27 2017, 18:17) Я п... Mar 27 2017, 20:31 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 27 2017, 21:13 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:13) Я у... Mar 27 2017, 21:45 Daedal07 Цитата(TSerg @ Mar 28 2017, 00:45) Не оби... Mar 27 2017, 21:54 TSerg Цитата(Daedal07 @ Mar 28 2017, 00:54) Зав... Mar 27 2017, 22:11 Daedal07 Цитата(AlexandrY @ Mar 27 2017, 23:31) В ... Mar 29 2017, 06:29 Tanya Цитата(Daedal07 @ Mar 29 2017, 09:29) Меж... Mar 29 2017, 07:50 Daedal07 Цитата(Tanya @ Mar 29 2017, 10:50) Трудно... Mar 29 2017, 08:15 Tanya Цитата(Daedal07 @ Mar 29 2017, 11:15) Ящи... Mar 29 2017, 08:38 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 11:15) Спр... Mar 29 2017, 08:42 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 11:42) Чт... Mar 29 2017, 09:38 Tanya Цитата(Daedal07 @ Mar 29 2017, 12:38) Я х... Mar 29 2017, 09:50 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 12:38) Нет... Mar 29 2017, 10:11 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:11) Зн... Mar 29 2017, 10:27 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:27) Ящи... Mar 29 2017, 10:43 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:43) Та... Mar 29 2017, 10:49 AlexandrY Цитата(Daedal07 @ Mar 29 2017, 13:49) Я н... Mar 29 2017, 10:52 Daedal07 Цитата(AlexandrY @ Mar 29 2017, 13:52) Т.... Mar 30 2017, 10:03 Tanya Цитата(Daedal07 @ Mar 30 2017, 13:03) Но ... Mar 30 2017, 10:21 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 13:03) мне... Mar 30 2017, 11:19 Daedal07 Цитата(AlexandrY @ Mar 30 2017, 14:19) Да... Mar 30 2017, 11:51 AlexandrY Цитата(Daedal07 @ Mar 30 2017, 14:51) Я, ... Mar 30 2017, 12:07 SSerge Цитата(AlexandrY @ Mar 30 2017, 19:07) От... Mar 30 2017, 13:43 Tanya Цитата(Daedal07 @ Mar 29 2017, 13:49) Пус... Mar 29 2017, 10:53 Daedal07 В контуре Привод - Двигатель обнаружился тахогенер... Mar 29 2017, 12:15 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:15) В к... Mar 29 2017, 12:23 Daedal07 Цитата(TSerg @ Mar 29 2017, 15:23) Тогда ... Mar 29 2017, 12:27 TSerg Цитата(Daedal07 @ Mar 29 2017, 15:27) Поч... Mar 29 2017, 15:25 TSerg Это диплом? Mar 27 2017, 15:51 Daedal07 Цитата(TSerg @ Mar 27 2017, 18:51) Это ди... Mar 27 2017, 15:57 TSerg Цитата(Daedal07 @ Mar 27 2017, 18:57) Есл... Mar 27 2017, 16:43 Daedal07 Цитата(TSerg @ Mar 27 2017, 19:41) Безотв... Mar 27 2017, 16:47 TSerg Цитата(Daedal07 @ Mar 27 2017, 19:47) Спр... Mar 27 2017, 18:31 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:31) Таня В... Mar 27 2017, 18:48 TSerg Цитата(Daedal07 @ Mar 27 2017, 21:48) Как... Mar 27 2017, 18:56 Daedal07 Цитата(TSerg @ Mar 27 2017, 21:56) Физика... Mar 27 2017, 19:09 TSerg Все от того, что Вы сразу не привели схему Вашей к... Mar 27 2017, 19:18 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:18) Все от... Mar 27 2017, 19:25 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:25) Упр... Mar 27 2017, 19:37 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:37) Не фак... Mar 27 2017, 19:45 TSerg Я, конечно, всех условий работы этой резательной м... Mar 27 2017, 19:50 Daedal07 Цитата(TSerg @ Mar 27 2017, 22:50) Я, кон... Mar 27 2017, 19:59 TSerg Цитата(Daedal07 @ Mar 27 2017, 22:59) Тол... Mar 27 2017, 20:06 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:06) Вы - с... Mar 27 2017, 20:15 TSerg Цитата(Daedal07 @ Mar 27 2017, 23:15) Нап... Mar 27 2017, 20:41 Daedal07 Цитата(TSerg @ Mar 27 2017, 23:41) Регист... Mar 28 2017, 20:14 AlexandrY Цитата(Daedal07 @ Mar 28 2017, 23:14) Что... Mar 29 2017, 06:07 alexr22b Цитата(Daedal07 @ Apr 9 2017, 04:18) Это ... Apr 9 2017, 00:30 somebody111 Окай, давай учиться вместе. Настройка ПИД регулято... Apr 3 2017, 23:23 AlexandrY Цитата(somebody111 @ Apr 4 2017, 02:23) В... Apr 4 2017, 06:07 somebody111 ЦитатаInstaSPIN
Могу сказать даже больше - я его и... Apr 4 2017, 11:51 AlexandrY Цитата(somebody111 @ Apr 4 2017, 14:51) В... Apr 4 2017, 13:46 somebody111 ЦитатаInstaSPIN у TI идет без исходников, поэтому ... Apr 4 2017, 14:08 AlexandrY Цитата(somebody111 @ Apr 4 2017, 17:08) Н... Apr 4 2017, 14:36 somebody111 Мне хватило понимания того, что в заявленном там а... Apr 4 2017, 15:03 @Ark Цитата(Daedal07 @ Mar 27 2017, 12:07) По ... Apr 4 2017, 22:42 AlexandrY Цитата(@Ark @ Apr 5 2017, 01:42) Теперь п... Apr 5 2017, 06:15 @Ark Цитата(AlexandrY @ Apr 5 2017, 09:15) У T... Apr 5 2017, 07:51 Daedal07 Цитата(@Ark @ Apr 5 2017, 01:42) Очередно... Apr 9 2017, 01:22 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:22) Опят... Apr 9 2017, 01:33 Daedal07 Цитата(@Ark @ Apr 9 2017, 04:33) Вы опред... Apr 9 2017, 01:53 @Ark Цитата(Daedal07 @ Apr 9 2017, 04:53) Эта ... Apr 9 2017, 02:24 Daedal07 Цитата(@Ark @ Apr 9 2017, 05:24) Ничего В... Apr 9 2017, 08:46 @Ark Вы почему-то упорно придерживаетесь своей первонач... Apr 9 2017, 10:35 Daedal07 Цитата(@Ark @ Apr 9 2017, 13:35) Видимо, ... Apr 9 2017, 11:16 @Ark Цитата(Daedal07 @ Apr 9 2017, 14:16) У ме... Apr 9 2017, 12:47 Daedal07 Цитата(@Ark @ Apr 9 2017, 15:47) То есть ... Apr 9 2017, 13:15 @Ark Цитата(Daedal07 @ Apr 9 2017, 16:15) Цита... Apr 9 2017, 15:39 Daedal07 Цитата(@Ark @ Apr 9 2017, 18:39) Сейчас т... Apr 9 2017, 15:48 AlexandrY Цитата(Daedal07 @ Apr 9 2017, 18:48) Сейч... Apr 9 2017, 17:59 Gruffly >и для разной длины картона
Так это картон?
Так... Apr 9 2017, 13:54 Daedal07 Цитата(Gruffly @ Apr 9 2017, 16:54) >и... Apr 9 2017, 13:55 Gruffly В энергетике процесса рубки/реза. Apr 9 2017, 14:04 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:04) В эне... Apr 9 2017, 14:07 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:07) Како... Apr 9 2017, 14:46 Daedal07 Цитата(Gruffly @ Apr 9 2017, 17:46) Прямо... Apr 9 2017, 14:59 Gruffly Цитата(Daedal07 @ Apr 9 2017, 14:59) Крас... Apr 9 2017, 15:16 Gruffly С Вашего позволения, еще несколько вопросов:
1. Дв... Apr 9 2017, 17:45 Daedal07 Цитата(Gruffly @ Apr 9 2017, 20:45) С Ваш... Apr 9 2017, 18:04 Gruffly Daedal07
Так, примерно понятно, но - уточнения.
... Apr 9 2017, 20:02 Daedal07 Цитата(Gruffly @ Apr 9 2017, 23:02) Т.е. ... Apr 9 2017, 20:19 @Ark Цитата(Gruffly @ Apr 9 2017, 23:02) Вся п... Apr 9 2017, 22:10 Daedal07 Цитата(@Ark @ Apr 10 2017, 01:10) Все это... Apr 9 2017, 22:22 Gruffly Цитата(@Ark @ Apr 9 2017, 23:10) Все это ... Apr 9 2017, 22:46 @Ark Цитата(Gruffly @ Apr 10 2017, 01:46) Чем ... Apr 9 2017, 23:08 Gruffly Цитата(@Ark @ Apr 10 2017, 00:08) Речь не... Apr 10 2017, 00:51 Gruffly Первые прикидки по вашей модели привода и САУ ... Apr 9 2017, 21:53 Daedal07 Цитата(Gruffly @ Apr 10 2017, 00:53) Перв... Apr 9 2017, 22:59
3 страниц  1 2 3 >
1 2 3 >
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
|