Мы наверное всё таки не понимаем друг друга.
Как же тогда производители сервоконтроллеров указывают этот параметров, без учёта параметров двигателя. Ведь они не знают какой двигатель и энкодер потребитель будет применять.
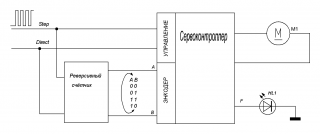
Я уже писал, мне надо просто узнать какую максимальную частоту может «захватить» в счетчики позиций МК. Двигатель можно даже не подключать. Представьте, что это не сервоконтроллер, а например частотомер, измеряющий одновременно 2 канала.
А разгонится или не разгонится двигатель – я это буду потом решать.
Цитата(slog @ Feb 28 2009, 11:33)

Разрешение энкодера выбирают не по максимальной частоте вращения двигателя, а по необходимой точности позиционирования.
Да но, вдруг потребитель захочет при заданной точности позиционирования ещё максимально быстро перемещаться на «быстрых» переездах. А сервоконтроллер не успеет «переварить» такую скорость, а движок, допустим будет очень "шустрым".

















 Feb 27 2009, 20:16
Feb 27 2009, 20:16