Добрый день!
С ПИД-регуляторами ранее дела не имел, прошу помощи по теории и практике ПИД- регулирования.
Во-первых, пожалуйста, подскажите хорошую книгу по дискретным ПИД-регуляторам, по тому, как составить модель объекта регулирования, как настроить коэффициенты регулятор.
Во-вторых, подскажите по глупым вопросам конкретной системы с дискретным ПИД-регулятором.
ПИД-регулятор управляет вращением ножей отрезного станка.
По линии бежит полотно, его надо резать на листы определённой длины. На линии стоит энкодер, которым измеряется скорость линии.
У ножа тоже стоит энкодер, по которому измеряется текущее положение ножа и скорость.
Точка реза ножа определена, алгоритм повторяется после каждого реза с этой точки.
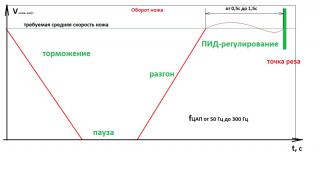
Алгоритм работы контроллера, в состав которого входит ПИД-регулятор, показан на рисунке.
Работа ножей состоит из четырёх этапов:
торможение, пауза, разгон, коррекции средней скорости.
На этапе коррекции должен работать ПИД-регулятор.
Этап коррекции занимает, в среднем, от 0,5с до 1,5с.
Я не знаю, много это или мало, но эту величину можно менять за счёт изменения времени паузы ножа.
С теорией ПИД-регулирования у меня пока очень плохо.
Пока знаю, что для того, чтобы рассчитать коэффициенты ПИД-регулятора, нужно составить модель объекта управления, т.е. ножа в моём случае. Как это сделать я не знаю.
У меня есть возможность проводить измерения на реальном объекте и смотреть результаты регулировки на ПК в режиме реального времени, сохранять их и анализировать.
Для реализации была выбрана следующую формулу дискретного регулятора:
Код
U(n)= Kp*e(n)+Ki*∑e(n) + Kd*[e(n)-e(n-1)]
Ознакомился с двумя методами Циглера-Николса, но для них у меня не хватает знаний.
Для одного метода я не знаю, как получить реакцию объекта управления на ступенчатое воздействие, по которому определяется параметры, участвующие в расчёте Kp, Ki, Kd.
Для другого метода, по которому измеряются собственные колебания объекта, находящегося на границе устойчивости, у меня нет понимания, как эти колебания измерить, потому что нож находится в режиме ПИД-регулирования не всё время вращения, а только ближе к концу каждого оборота.
Я смогу ввести нож в режим, когда он вращается с постоянной скоростью и всегда находится в режиме ПИД-регулирования. Далее, я переведу ПИД-регулятор в П-регулятор и получу колебания, измерю их период.
Но у меня сомнения следующего рода:
В реальности нож будет работать в другом режиме, т.е. на других скоростях и время на регулирование – это не время полного оборота, а половина, в лучшем случае. Подойдут ли полученные таким способом коэффициенты для реальной работы?
Эскизы прикрепленных изображений

















 Mar 27 2017, 09:07
Mar 27 2017, 09:07